Bemerkung
Hallo und herzlich willkommen in der SunFounder-Community für Raspberry Pi-, Arduino- und ESP32-Enthusiasten auf Facebook! Tauche gemeinsam mit anderen Technikbegeisterten noch tiefer in die Welt von Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Erhalte Hilfe bei technischen Problemen und Fragen nach dem Kauf – direkt von unserem Team und der Community.
Lernen & Teilen: Tausche Tipps und Anleitungen aus, um deine Fähigkeiten zu erweitern.
Exklusive Einblicke: Erfahre als Erster von neuen Produkten und erhalte exklusive Vorschauen.
Spezielle Rabatte: Profitiere von exklusiven Angeboten für unsere neuesten Produkte.
Festliche Aktionen und Verlosungen: Nimm an spannenden Gewinnspielen und saisonalen Aktionen teil.
👉 Bereit, gemeinsam mit uns Neues zu entdecken und zu entwickeln? Klicke auf [hier] und tritt noch heute bei!
3.1 Piepen
In dieser Lektion lernst du, wie du einen Buzzer mit dem Raspberry Pi Pico 2 W zum Piepen bringst. Ein Buzzer ist – ähnlich wie eine LED – ein digitales Ausgabegerät und lässt sich sehr einfach steuern. Für dieses Projekt verwenden wir einen aktiven Buzzer, der bei einem Steuersignal automatisch einen Ton erzeugt.
Was ist ein aktiver Buzzer?
Ein aktiver Buzzer enthält einen integrierten Oszillator, der seine Anwendung vereinfacht. Um einen Ton zu erzeugen, genügt ein einfaches Steuersignal – eine komplexe Frequenzsteuerung ist nicht nötig. Das unterscheidet ihn vom passiven Buzzer, der ein externes Signal zur Tonerzeugung benötigt.

Benötigte Komponenten
Für dieses Projekt werden die folgenden Bauteile benötigt.
Ein komplettes Kit ist besonders praktisch – hier ist der Link:
Name |
ENTHALTENE TEILE |
LINK |
|---|---|---|
Pico 2 W Starter Kit |
450+ |
Du kannst die Bauteile alternativ auch einzeln über die folgenden Links beziehen:
SN |
KOMPONENTE |
MENGE |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 (S8050) |
||
6 |
1 (1KΩ) |
||
7 |
Aktiver Buzzer |
1 |
Schaltplan
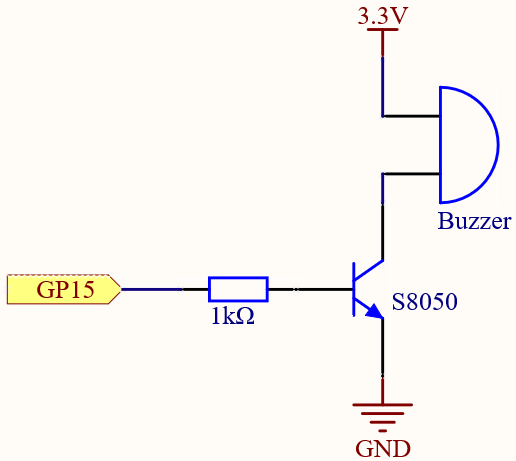
In dieser Schaltung wird der Buzzer über einen Transistor (S8050, NPN-Typ) mit Strom versorgt. Der Transistor verstärkt den Stromfluss, wodurch der Ton des Buzzers lauter wird, als wenn er direkt mit dem Pico verbunden wäre.
Das passiert dabei:
GP15 gibt ein High-Signal aus, um den Transistor zu schalten.
Sobald der Transistor aktiviert ist, kann Strom durch den Buzzer fließen – er piept.
Ein 1kΩ-Widerstand begrenzt den Strom und schützt so den Transistor vor Schäden.
Verdrahtung
Stelle sicher, dass du einen aktiven Buzzer verwendest. Du erkennst ihn an der versiegelten Rückseite – im Gegensatz zur offenen Leiterplatte eines passiven Buzzers.
Damit der Buzzer funktioniert, wird ein Transistor benötigt – in unserem Fall der S8050 (NPN).

Programmcode schreiben
Lass uns ein einfaches MicroPython-Programm schreiben, um den Buzzer zu steuern.
Bemerkung
Öffne die Datei
3.1_beep.pyaus dem Ordnerpico-2w-kit-main/micropythonoder kopiere den Code in Thonny. Klicke anschließend auf „Run“ oder drücke F5.Achte darauf, dass der richtige Interpreter ausgewählt ist: MicroPython (Raspberry Pi Pico).COMxx.
import machine
import utime
# Initialisierung des Buzzer-Pins (GP15)
buzzer = machine.Pin(15, machine.Pin.OUT)
while True:
# Schleife zum Piepen des Buzzers (4 Mal)
for i in range(4):
buzzer.value(1) # Buzzer einschalten
utime.sleep(0.3) # 0,3 Sekunden warten
buzzer.value(0) # Buzzer ausschalten
utime.sleep(0.3) # 0,3 Sekunden warten
utime.sleep(1) # Längere Pause vor dem nächsten Durchlauf
Wenn der Code ausgeführt wird, solltest du Folgendes hören:
Der Buzzer piept 4 Mal hintereinander, jeweils mit einer Pause von 0,3 Sekunden.
Danach folgt eine längere Pause von 1 Sekunde, bevor die Sequenz erneut beginnt.
Code-Erklärung
Initialisierung des Buzzers:
buzzer = machine.Pin(15, machine.Pin.OUT): Setzt GP15 als Ausgang, um den Buzzer zu steuern.
Hauptschleife:
Die Schleife
while Truesorgt dafür, dass der Code kontinuierlich läuft.Innerhalb der Schleife wird der Buzzer 4 Mal ein- (
buzzer.value(1)) und ausgeschaltet (buzzer.value(0)), jeweils mit 0,3 Sekunden Pause.Nach den 4 Pieptönen folgt eine 1-sekündige Pause, bevor die nächste Runde startet.
Weitere Experimente
Piepdauer ändern: Passe die Werte von
utime.sleep(0.3)an, um längere oder kürzere Töne zu erzeugen.Anzahl der Pieptöne variieren: Ändere die Anzahl der Schleifendurchläufe für mehr oder weniger Pieptöne.
Tastersteuerung einbauen: Schließe einen Taster an GP14 an und erweitere den Code, sodass der Buzzer nur bei Tastendruck piept.
Fazit
In dieser Lektion hast du gelernt, wie man einen aktiven Buzzer mithilfe eines Transistors und des Raspberry Pi Pico 2 W steuert. Du hast damit die Grundlagen zur Nutzung digitaler Ausgabegeräte für Soundeffekte kennengelernt – ein Prinzip, das sich auch auf LEDs, Motoren und andere Komponenten übertragen lässt.