Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Test Ultrasonic Module
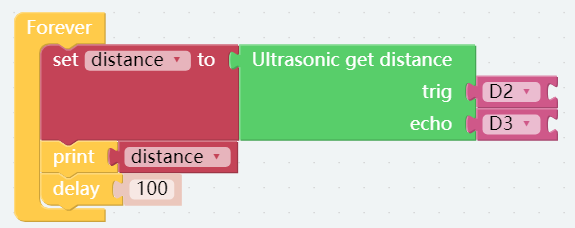
PiCar-X has a built-in Ultrasonic Sensor module that can be used for obstacle avoidance and automatic object-following experiments. In this lesson the module will read a distance in centimeters (24 cm = 1 inch), and Print the results in a Debug window.
TIPS
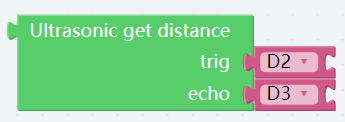
The Ultrasonic get distance block will read the distance from the PiCar-X to an obstacle directly ahead.
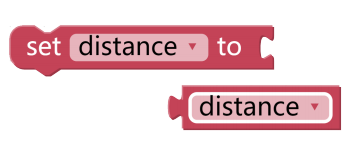
This program is simplified with a Variable. For example, when there are multiple functions in a program that each need to use the distance to an obstacle, a Variable can be used to report the same distance value to each function, instead of each function reading the same value separately.

Click the Create variable… button on the Variables category, and use the drop-down arrow to select the variable named “distance”.

The Print function can print data such as variables and text for easy debugging.
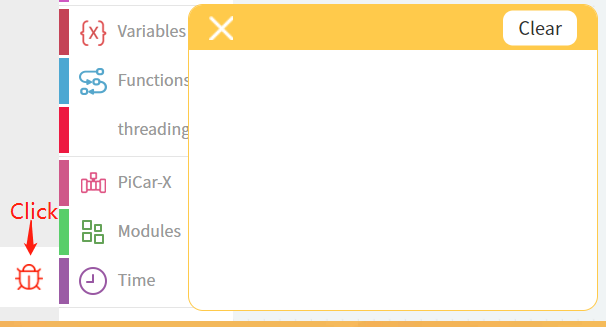
Once the code is running, enable the debug monitor by clicking the Debug icon in the bottom left corner.
EXAMPLE
Note
You can write the program according to the following picture, please refer to the tutorial: How to Create a New Project?.
Or find the code with the same name on the Examples page of the EzBlock Studio and click Run or Edit directly.