Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Minecart Plus
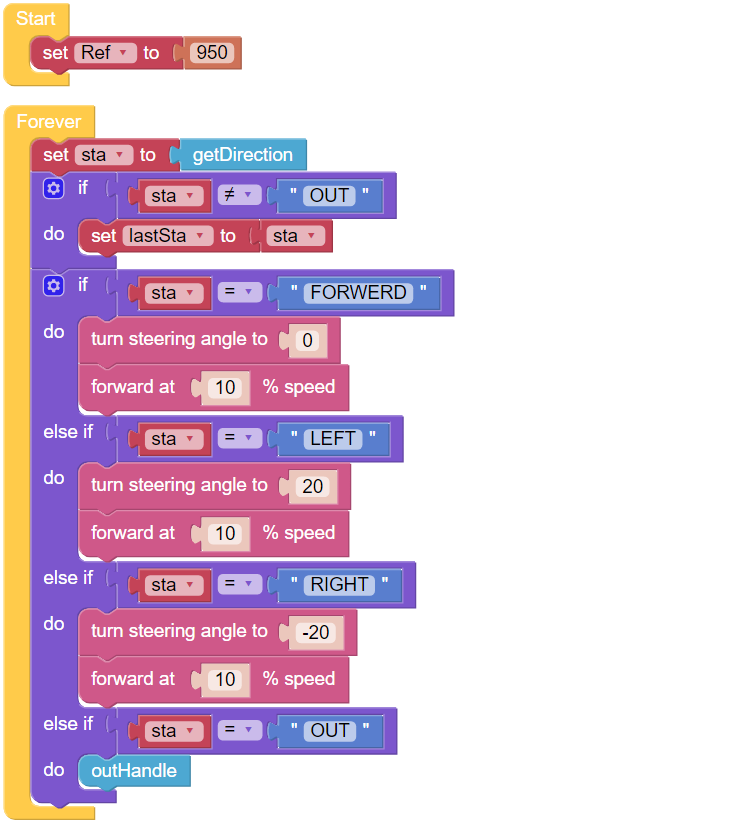
In this project, derailment recovery has been added to the Minecart project to let the PiCar-X adapt and recover from a more severe curve.
TIPS
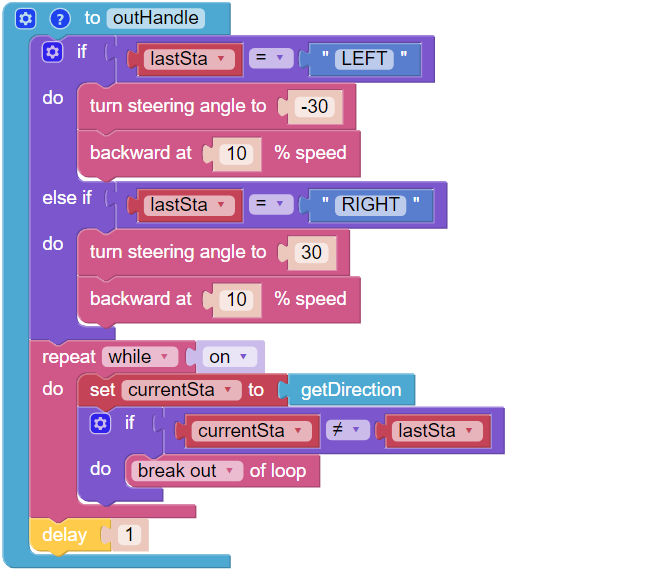
Use another to do something block to allow the PiCar-X to back up and recover from a sharp curve. Note that the new to do something function does not return any values, but is used just for reorienting the PiCar-X.
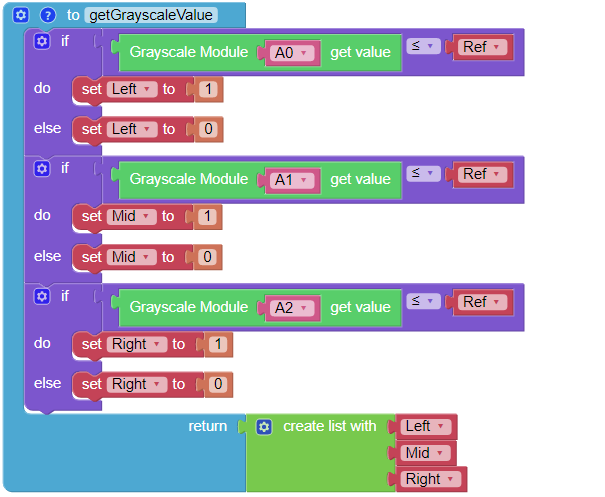
Set ref to () block is used to set the grayscale threshold, you need to modify it according to the actual situation. You can go ahead and run Test Grayscale Module to see the values of the grayscale module on the white and black surfaces, and fill in their middle values in this block.
EXAMPLE
Note
You can write the program according to the following picture, please refer to the tutorial: How to Create a New Project?.
Or find the code with the same name on the Examples page of the EzBlock Studio and click Run or Edit directly.