记录功能¶
PiArm 的手臂有 2 种控制模式: 角度 和 坐标。
本项目用的是 坐标模式。
在本项目中,我们将使用双摇杆模块在坐标模式下控制 PiArm 移动,并通过摇杆按钮记录其移动轨迹,以便 PiArm 可以沿着记录的轨迹重复移动。
编程¶
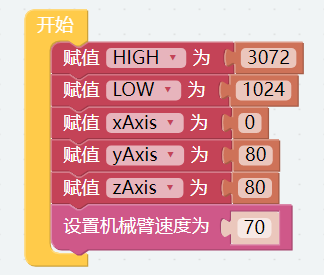
第一步
创建五个变量 (HIGH, LOW, xAxis, yAxis 和 zAxis) 并为它们设置初始值。
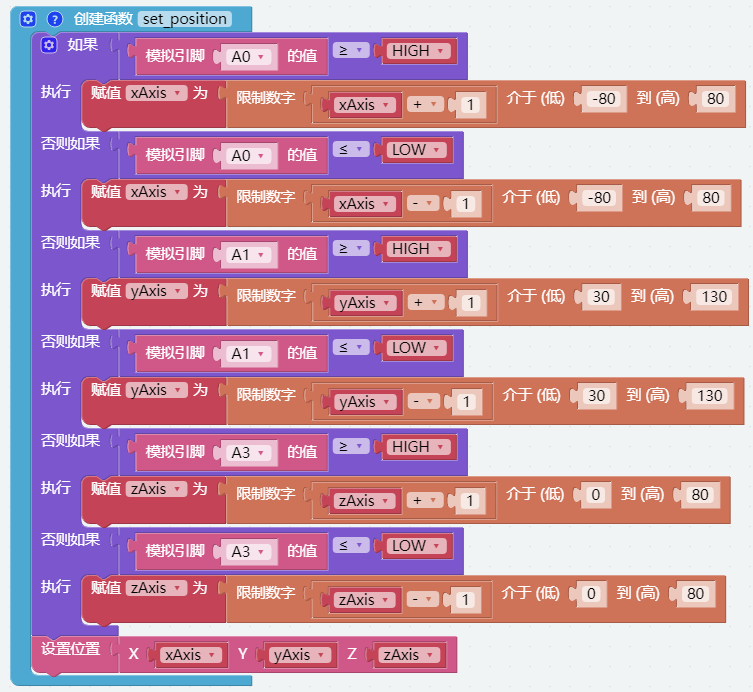
第二步
创建一个名为 [set_position] 的函数,用双摇杆模块在坐标模式下控制 PiArm 。
如果 左摇杆 向右推动, 则让 PiArm 向右转动。
如果 左摇杆 向左推动, 则让 PiArm 向左转动。
如果 左摇杆 向前推动, 则让 PiArm 向前伸长。
如果 左摇杆 向后推动, 则让 PiArm 向后缩回。
如果 右摇杆 向前推动, 则让 PiArm 向上抬高。
如果 右摇杆 向后推动, 则让 PiArm 向下降低。
注解
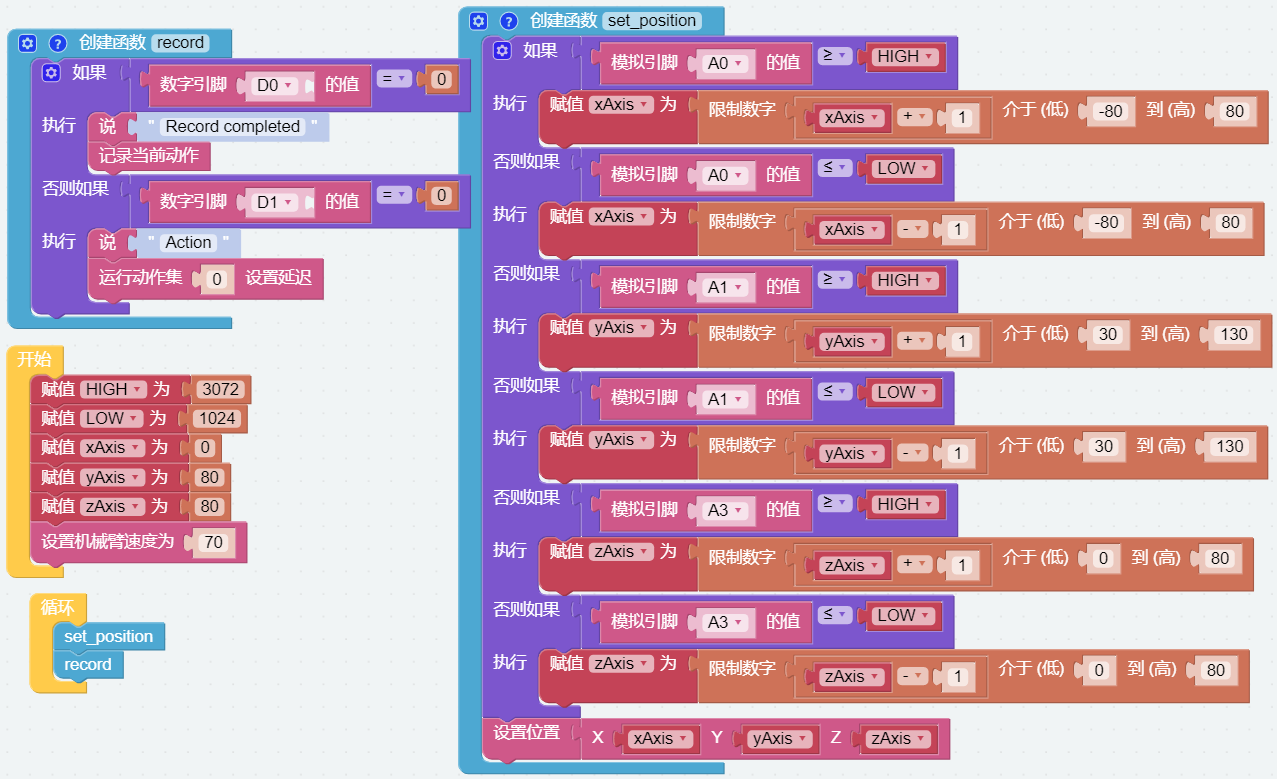
第三步
创建了一个新函数 [record] 来记录当前动作并允许 PiArm 重现它们。
双摇杆模块的左右按钮分别连接到D0(左按钮)、D1(右按钮)。
按键按下时输出低电平(0),松开时输出高电平(1)。
当按下左摇杆的按钮时,此时会记录PiArm的动作,并有语音提示,表示记录完成。
当按下右摇杆的按钮时,PiArm 会重复已经记录好的动作。

注解
代码块 [如果...执行...], [...和...] 以及 [=] 都来自 逻辑 类别。
[运行动作集 (0) 设置延迟]: 该代码块用于设置记录好的每组动作的时间间隔,如果为0则表示没有间隔时间连续重复之前的动作。
第四步
将 [set_position] 和 [record] 函数放入 [循环] 块中依次执行,最后点击下载按钮运行代码。
现在你可以使用摇杆来控制PiArm,按下左摇杆的按钮记录需要的动作,记录几组后,按下右摇杆的按钮,让PiArm复现这些动作。
注解
您也可以在Ezblock Studio的 示例 页面找到同名的代码,直接点击运行或编辑查看代码块。
拓展¶
你也可以在这个项目中添加单独的臂端工具控制代码,这样你就可以同时控制PiArm的手臂和臂端工具了。
如果想要控制铲斗, 请参考 铲斗 - 摇杆控制 来搭建代码。
如果想要控制竖直夹, 请参考 竖直夹 - 摇杆控制 来搭建代码。
如果想要控制电磁铁, 请参考 电磁铁 - 摇杆控制 来搭建代码。