手臂¶
PiArm 的手臂有两种方法可以控制: 角度模式 和 坐标模式 。
角度模式¶
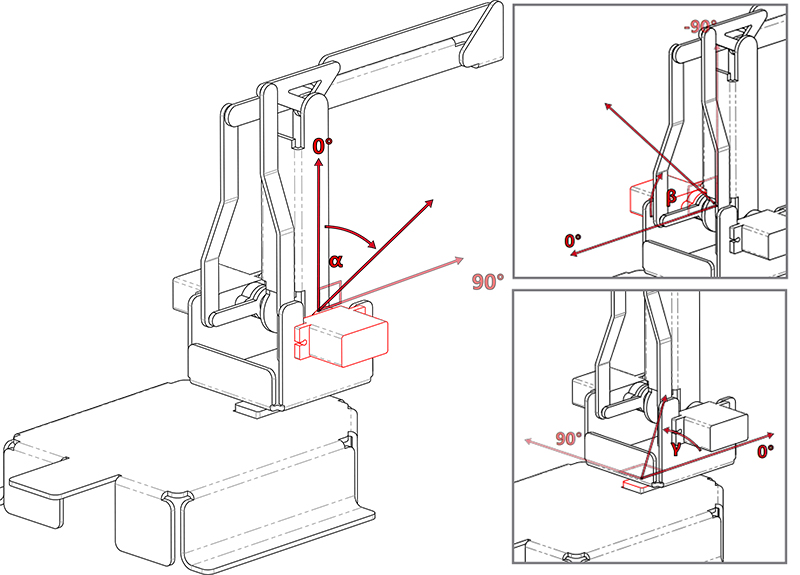
手臂上有三个舵机控制它的上下、左右、前后,我们用 α、 β 和 γ 来表示它们的旋转角度,如下图所示。
α(alpha): 代表手臂的前后旋转角度,由于结构的限制,建议旋转范围为:-30 ~ 60。β(beta): 代表手臂的上下旋转角度,由于结构的限制,建议的旋转范围是:-60 ~ 30。γ(gamma): 代表手臂的左右旋转角度,范围是:-90 ~ 90。
坐标模式¶
PiArm有一个空间矩形坐标系,其原点位于两侧舵机输出轴的中心点。控制点(Control Point)位于手臂的顶部,刻度单位为毫米。在初始状态下,控制点(Control Point)的坐标为(0,80,80)。
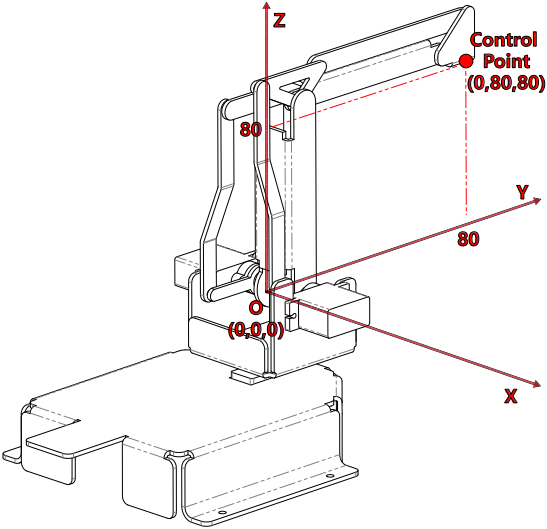
需要注意的是,PiArm的臂长是有限的,如果坐标值的设置超过了其机械运动的极限,PiArm将旋转到一个不可预测的位置。
换句话说,PiArm的总臂长是160毫米,这意味着沿Y轴移动的控制点的极限值应该在(0,0,0)到(0,160,0)之间。但是,由于结构本身的限制,活动范围应该比这个范围小得多。
X坐标的推荐范围是-80 ~ 80。
Y坐标的推荐范围是30 ~ 130。
Z坐标的建议范围是0 ~ 80。