坐标模式¶
PiArm 的手臂有 2 种控制模式: 角度 和 坐标。
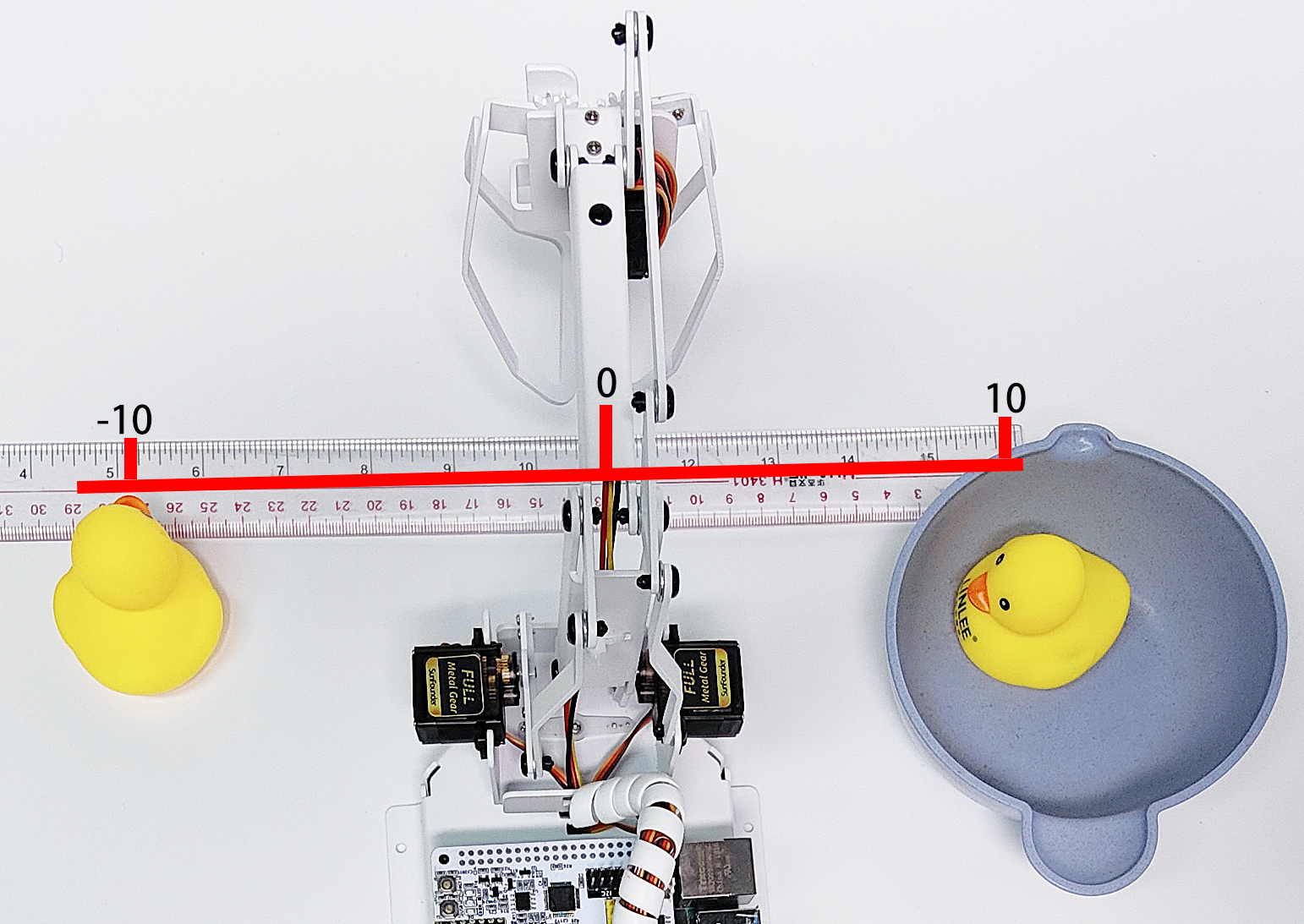
本项目通过坐标模式,设定2个坐标点,让机械臂将左边的橡皮鸭夹到右边的碗里。但你需要先将 竖直夹 装到PiArm上。
编程¶
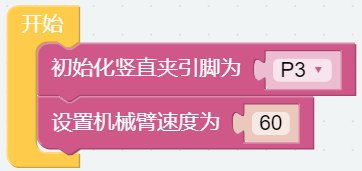
第一步
初始化竖直夹的引脚及设置机械臂的速度为60%。
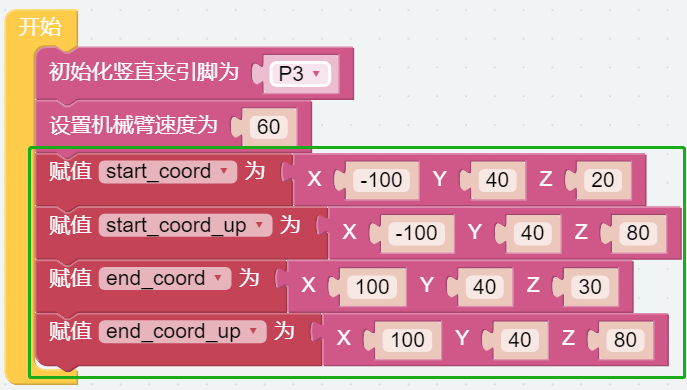
第二步
设置2个点的坐标。由于左边橡皮鸭和右边的碗在同一条线上,你会发现它们的Y坐标值是一样的。
[start_coord]: 左边橡皮鸭的坐标。
[start_coord_up]: 左边橡皮鸭的正上方坐标。
[end_coord]: 碗的坐标。
[end_coord_up]:碗的正上方坐标。
注解
这里的坐标都是指的控制点的坐标,但是装好臂端工具后,X和Y坐标的实际距离大一点。
不同的臂端工具,误差距离不一样。比如竖直夹和电磁铁为3-4cm, 铲斗为6-7cm。
比如在这里X坐标写的是100,但实际距离是13-14cm。
一般建议X的坐标是-80 ~ 80,但由于这里Y坐标值较小(建议范围是30~130),所以设置为100也是能到的。但如果你增大了Y坐标值,由于连杆作用,X坐标值需要根据实际情况调小一点。
第三步
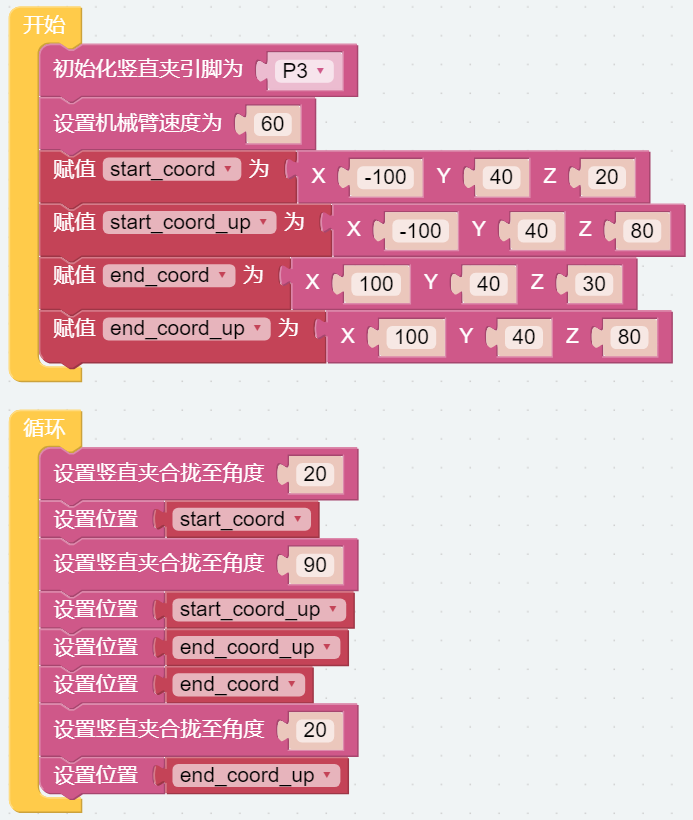
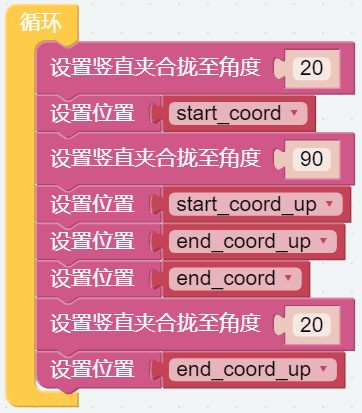
在[循环] 块中,让PiArm完成以下动作。
PiArm先张开竖直夹(20°),然后转动到左边橡皮鸭的位置(start_coord),再合拢竖直夹(90°)。
PiArm抬起头(start_coord_up),再转动到右边的碗的正上方(end_coord_up)。
PiArm低头(end_coord_up),再张开竖直夹(20°)让橡皮鸭掉落到碗里,最后再抬起头(end_coord_up)。
第四步
点击右下角的 下载 按钮,你就能看到PiArm重复上面描述的动作。
注解
您也可以在EzBlock Studio的示例页面找到同名的代码,直接点击运行或编辑查看代码块。