双摇杆控制¶
我们可以分两部分控制 PiArm,手臂和臂端工具。在第一个项目中,您已经学习了如何组装和测试PiArm的3个臂端工具。在这个项目中,我们将使用套件附带的双摇杆模块来控制 PiArm 的手臂。
在本项目中,用 角度模式 和双摇杆模块操控机械臂, 后面的项目也是在此基础上增添了三个臂端工具的控制代码,达到用双摇杆同时控制PiArm 的手臂和臂端工具部分的目的。

手臂 - 摇杆控制¶
第一步
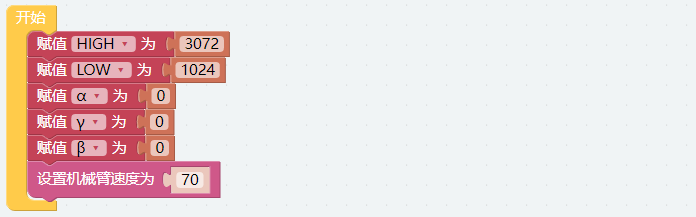
在编程的时候常常用变量来简化程序, 点击 变量 类别中的 创建变量 来创建出五个变量 (HIGH, LOW, α, β and γ)。
注解
已经创建好的变量也会存放在 变量 类别中。

第二步
为这些变量设置初始值并将舵机的转动速度设置为70%。
注解
变量 HIGH 和 LOW 如何取值请参考 双摇杆模块。
第三步
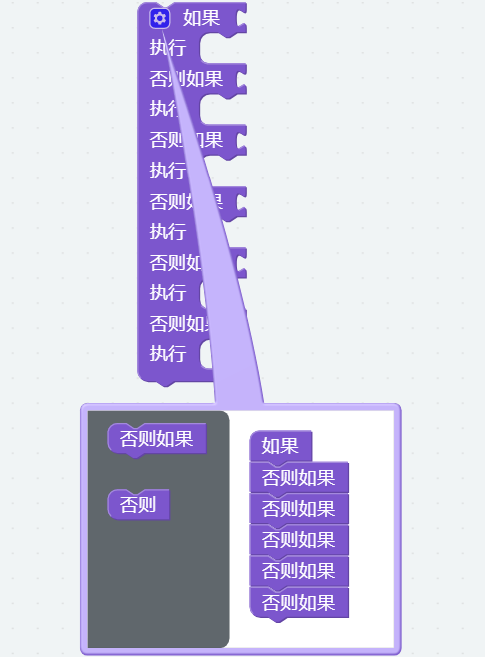
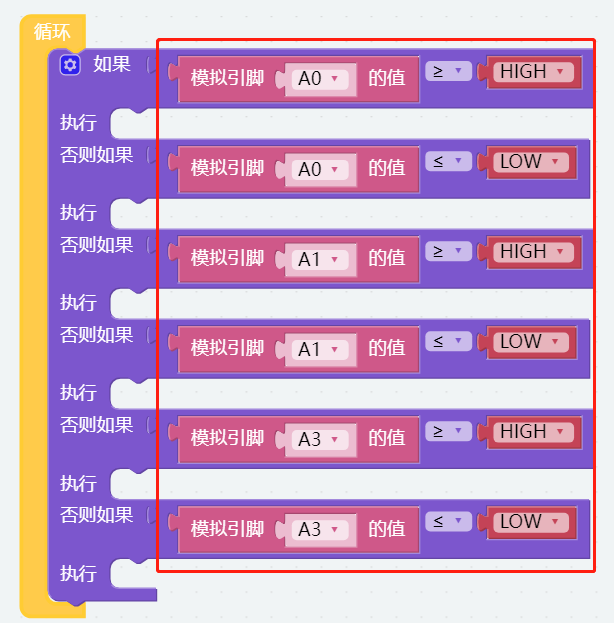
用 [如果...执行...] 代码块来做条件判断。
[否则如果]: 用于条件判断的代码块, 可以点击设置图标将 [否则] 或 [否则如果] 拖拽到 [如果] 下方来创建多个条件判断。
第四步
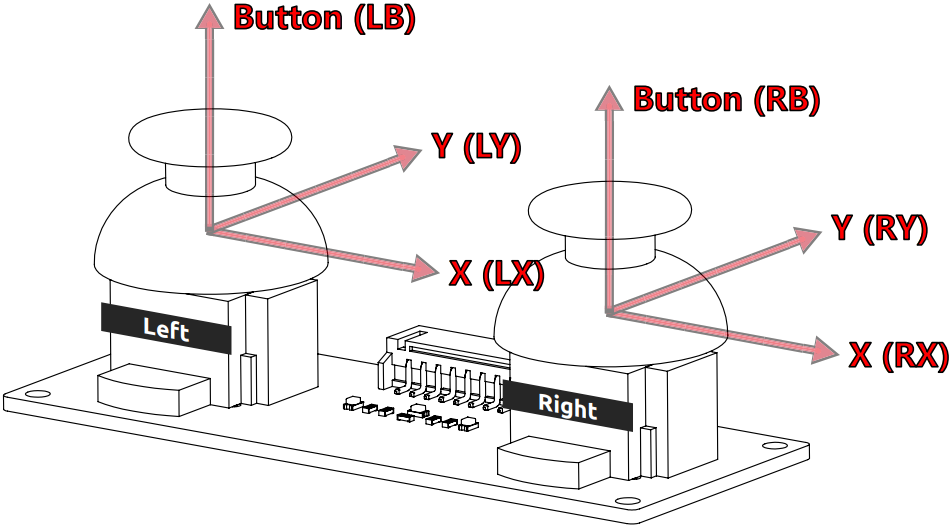
双摇杆模块左右连接如下图所示也可以参考 双摇杆模块。
左摇杆的X轴连接到A0,Y轴连接到A1。
右摇杆的X轴连接到A2,Y轴连接到A3。
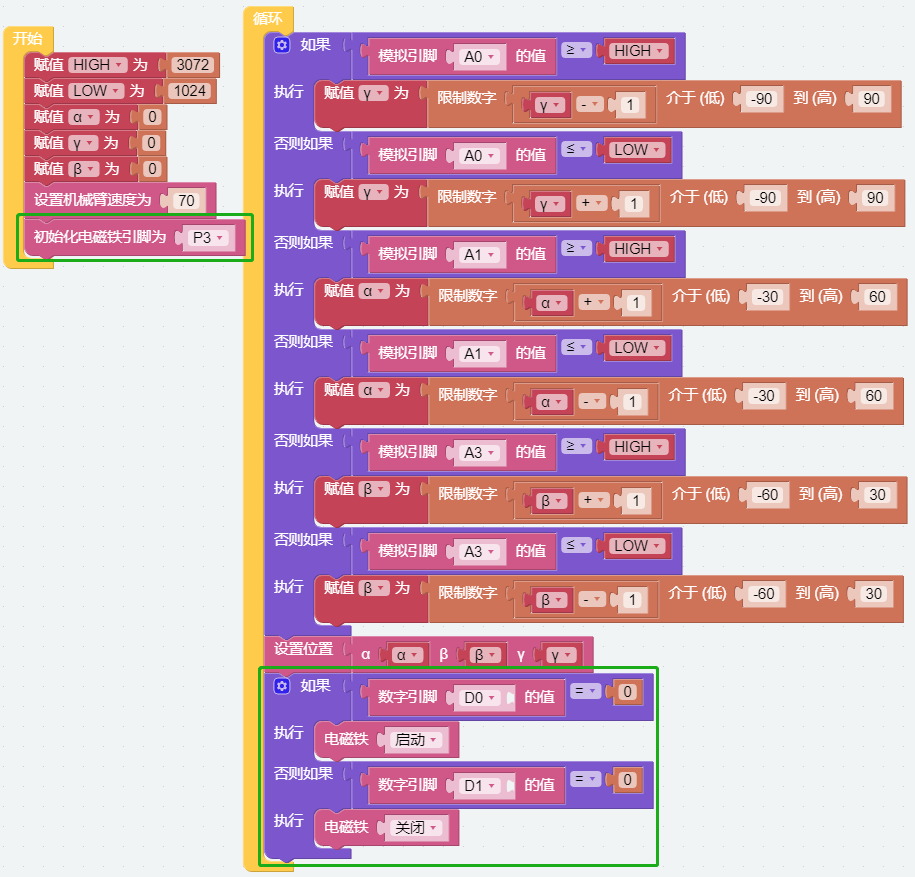
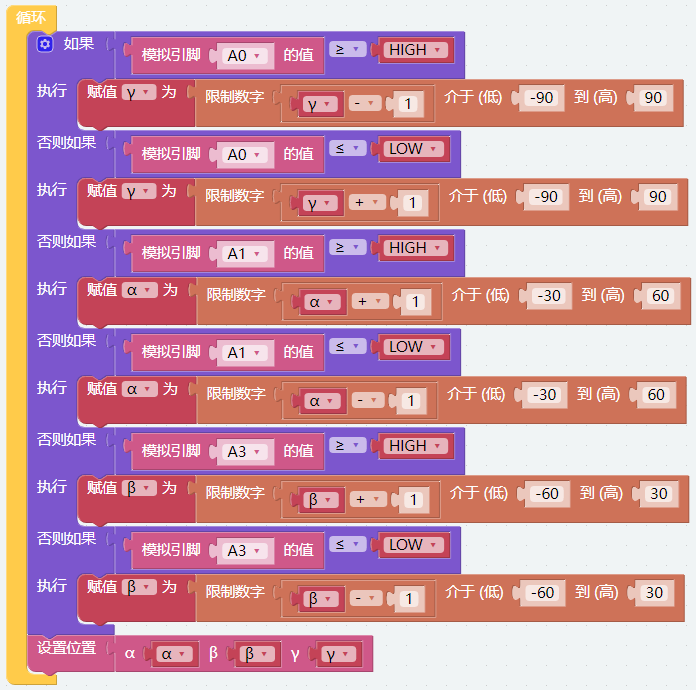
假定用左摇杆的XY轴和右摇杆的Y轴来控制机械臂的三个舵机,首先要设置判断条件来判断左右摇杆是否被推动。
如果 A0 (LX) 大于 HIGH (3072), 则可以确定 左摇杆 向右边推动。
如果 A0 (LX) 小于 LOW (1024), 则可以确定 左摇杆 向左边推动。
如果 A1 (LY) 大于 HIGH (3072), 则可以确定 左摇杆 向前推动。
如果 A1 (LY) 小于 LOW (1024), 则可以确定 左摇杆 向后推动。
如果 A3 (RY) 大于 HIGH (3072), 则可以确定 右摇杆 向前推动。
如果 A3 (RY) 小于 LOW (1024), 则可以确定 右摇杆 向后推动。
第五步
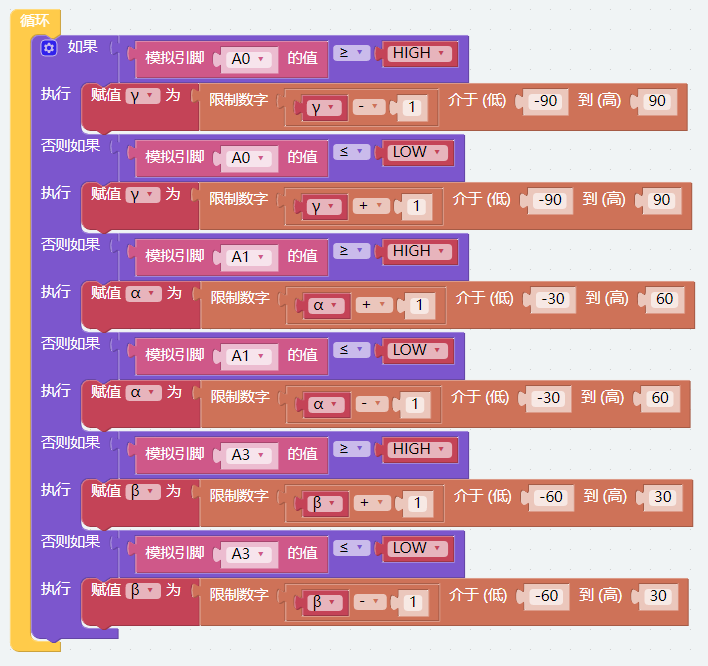
然后根据左右摇杆的推动方向来设置机械臂移动方向。
如果 左摇杆 向右推动, 则让 PiArm 向右转动。
如果 左摇杆 向左推动, 则让 PiArm 向左转动。
如果 左摇杆 向前推动, 则让 PiArm 向前伸长。
如果 左摇杆 向后推动, 则让 PiArm 向后缩回。
如果 右摇杆 向前推动, 则让 PiArm 向上抬高。
如果 右摇杆 向后推动, 则让 PiArm 向下降低。
注解
α,β和γ表示 PiArm 上三个舵机的旋转范围, 参考: 角度模式。[限制数字...介于(低)...到(高)...]: 可以在数学类中找到,用于设置一个变量的变化范围。
第六步
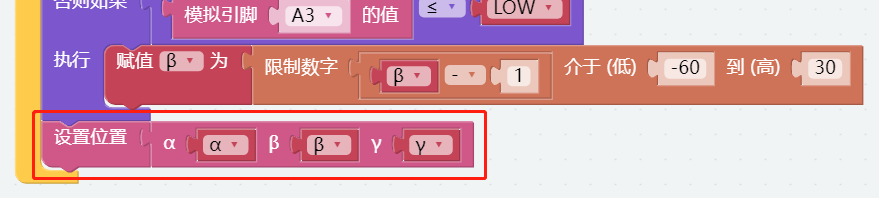
将获取到的 α, β 和 γ 角度值放入 [α () β () γ ()] 代码块中, 然后用 [设置位置] 代码块使 PiArm 旋转到该位置。
第七步
单击下载按钮后,便可以用双摇杆模块来控制 PiArm 了。
左摇杆向左或向右推动, 机械臂将向左或向右转动。
左摇杆向前或向后推动, 机械臂会伸出或者缩回。
右摇杆向前或向后推动, 机械臂会抬高或降低。
注解
您也可以在Ezblock Studio的 示例 页面找到同名的代码,直接点击运行或编辑查看代码块。
铲斗 - 摇杆控制¶
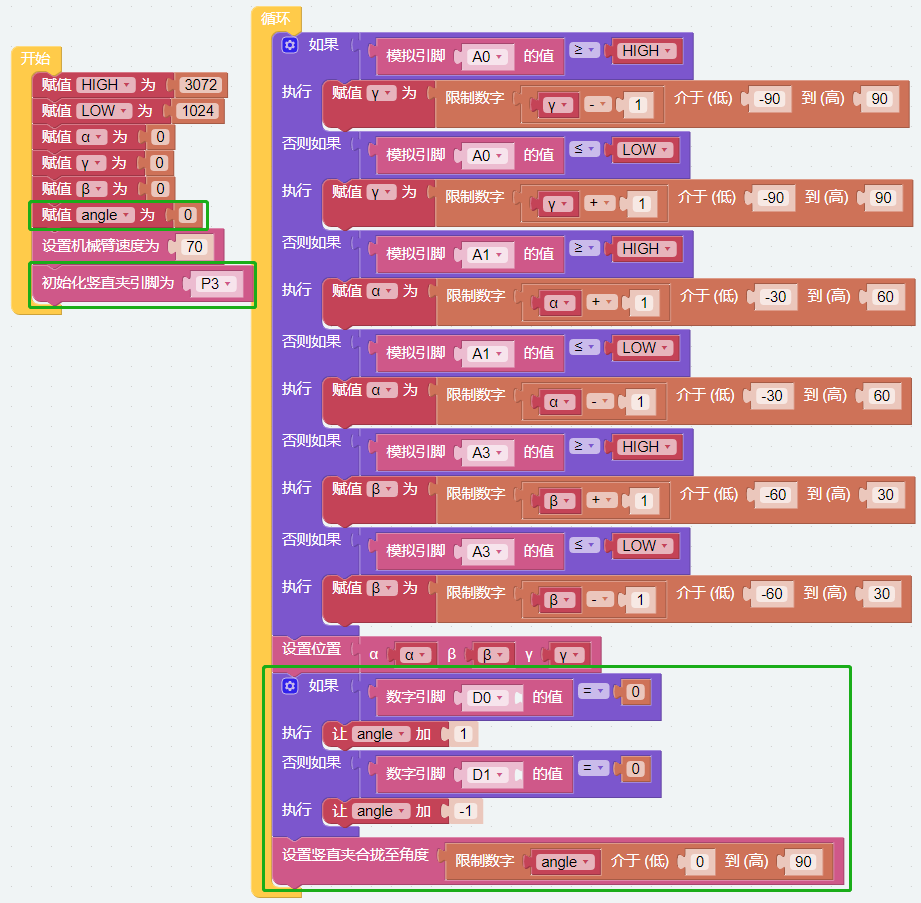
现在在控制手臂的代码基础上加上铲斗的控制代码。
注解
您也可以在Ezblock Studio的 示例 页面找到同名的代码,直接点击运行或编辑查看代码块。
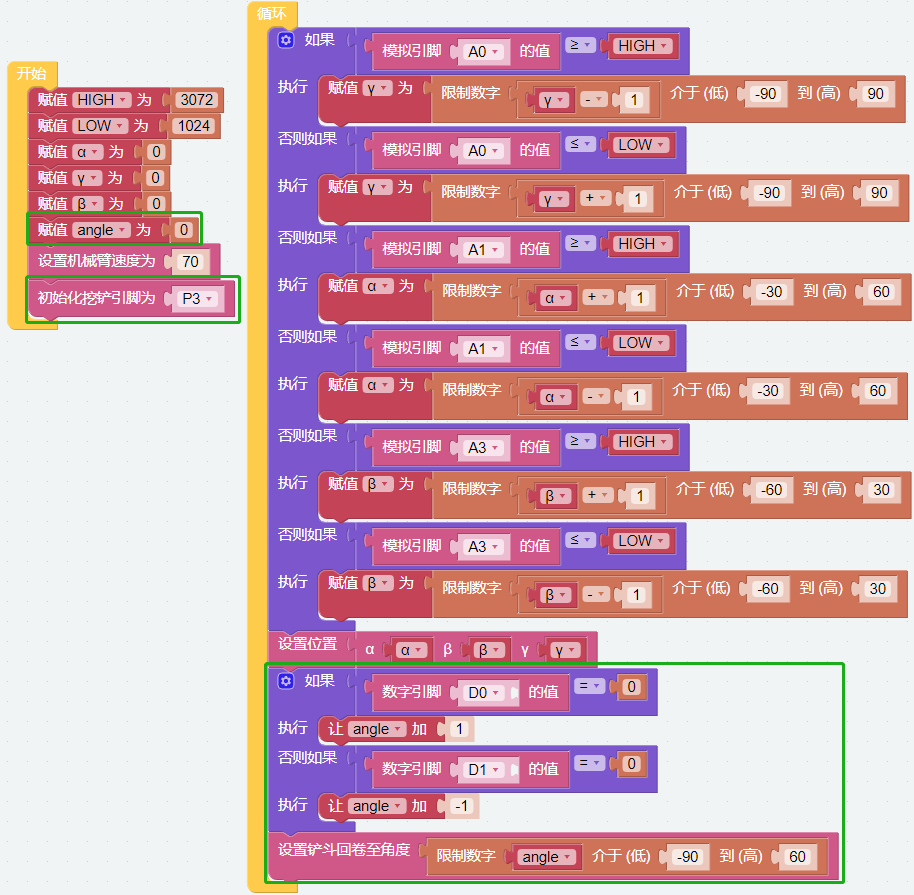
代码运行后,你可以用双摇杆模块同时控制PiArm的手臂和铲斗。但你需要先将 铲斗 安装到PiArm上。
左摇杆向左或向右推动, 机械臂将向左或向右转动。
左摇杆向前或向后推动, 机械臂会伸出或者缩回。
右摇杆向前或向后推动, 机械臂会抬高或降低。
按下左摇杆,铲斗向内回卷。
按下右摇杆,铲斗向外伸展。