游戏 - 收集铁片¶
在这个项目中,准备好3种不同形状的铁片,PiArm会随机说一种形状,你需要控制PiArm将相应形状的铁片放入各自的盒子里面。
编程¶
第一步
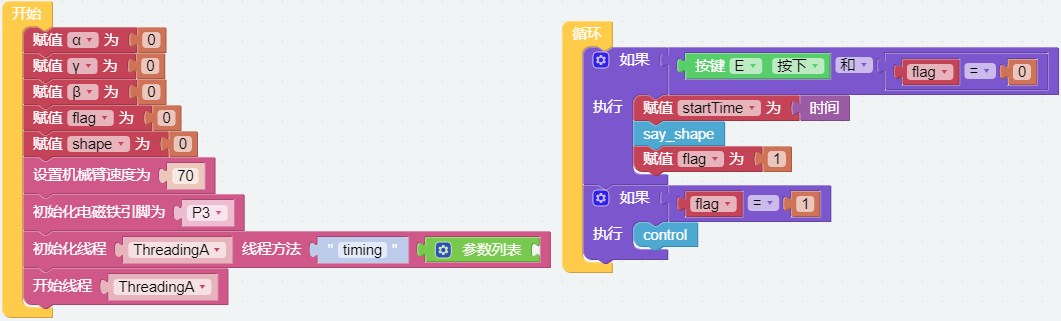
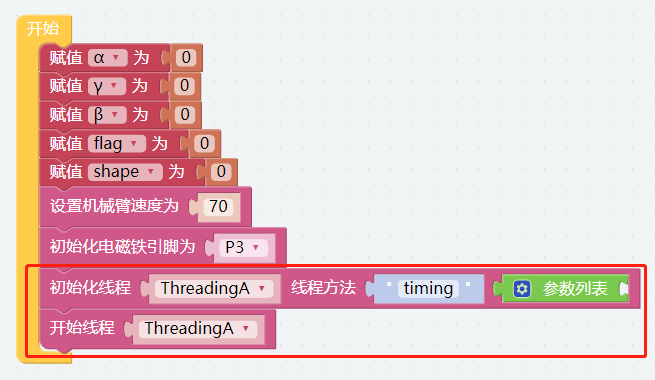
创建五个变量 (α, β, γ, flag, shape) 并为它们设置初始值。 然后初始化 PiArm 的旋转速度和 电磁铁 的引脚
注解
α,βandγ表示 PiArm 手臂上三个舵机的旋转角度范围, 可参考: 角度模式.

第二步
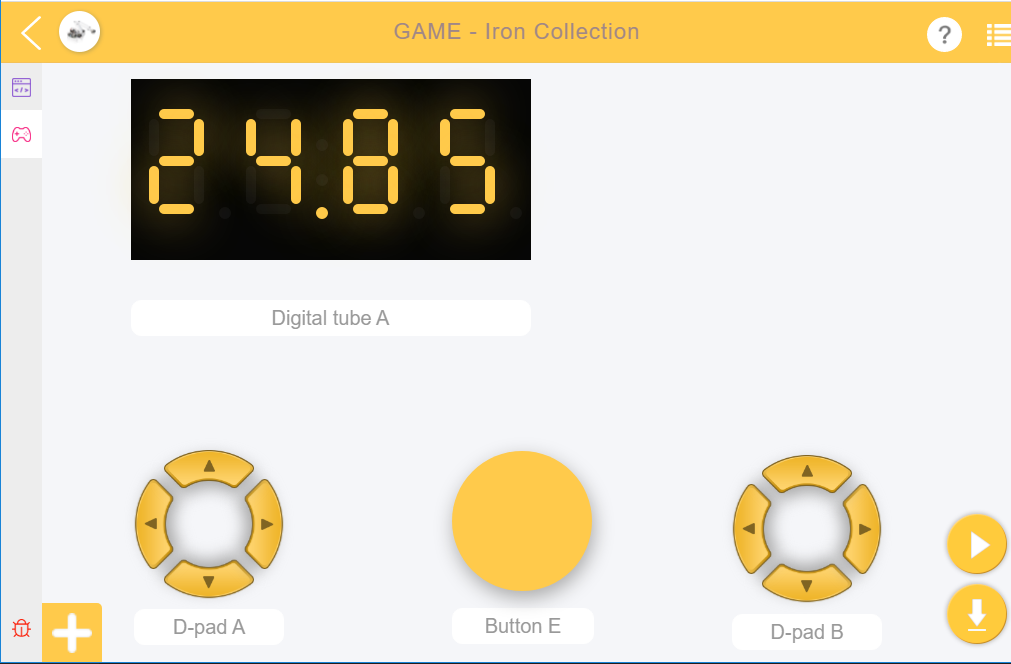
从远程控制界面拖2个D-pad用来控制PiArm,一个按键来启动游戏,以及一个数码管来显示时间。

第三步
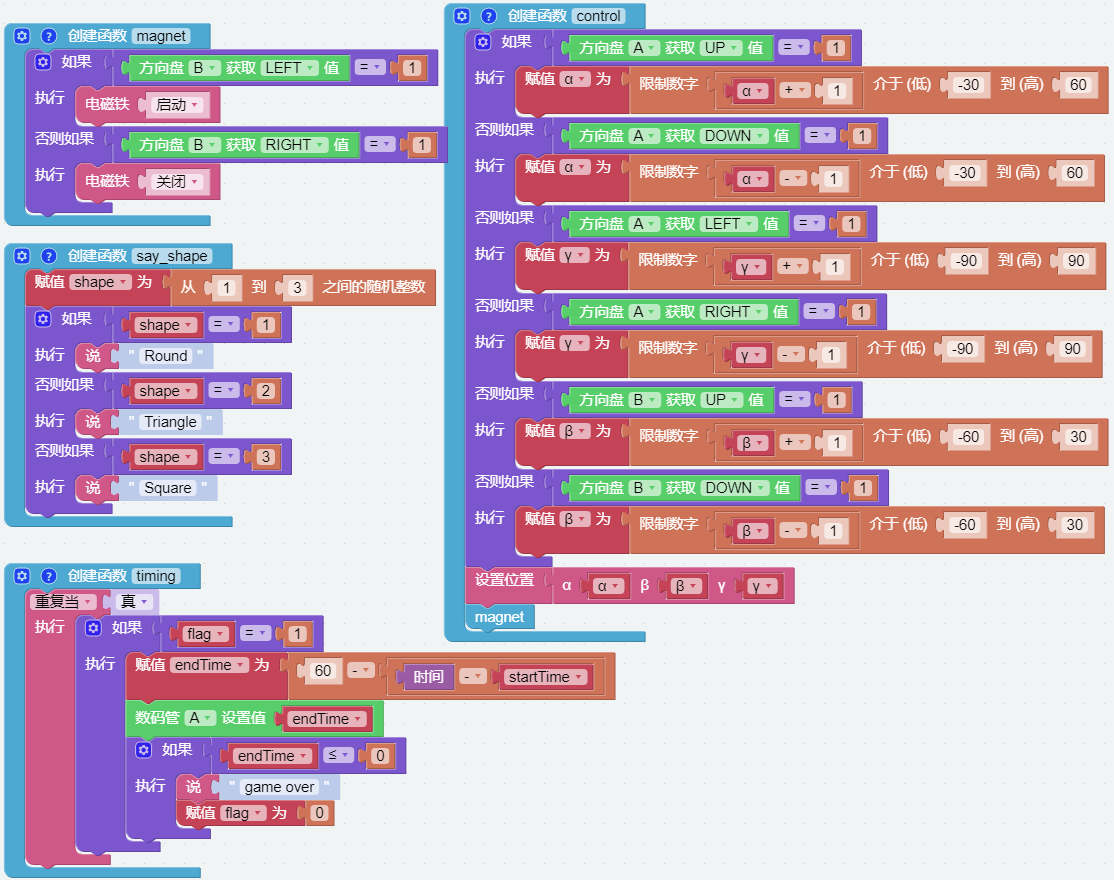
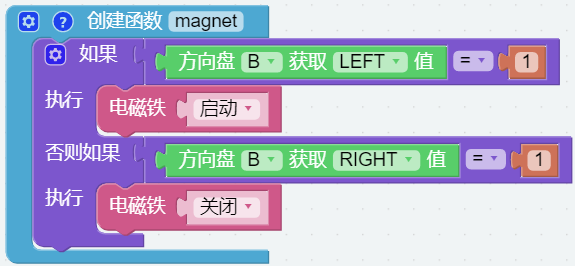
创建一个叫做 [magnet] 的函数用来实现让D-pad B左右方向的按钮控制电磁铁的开和关。
第四步
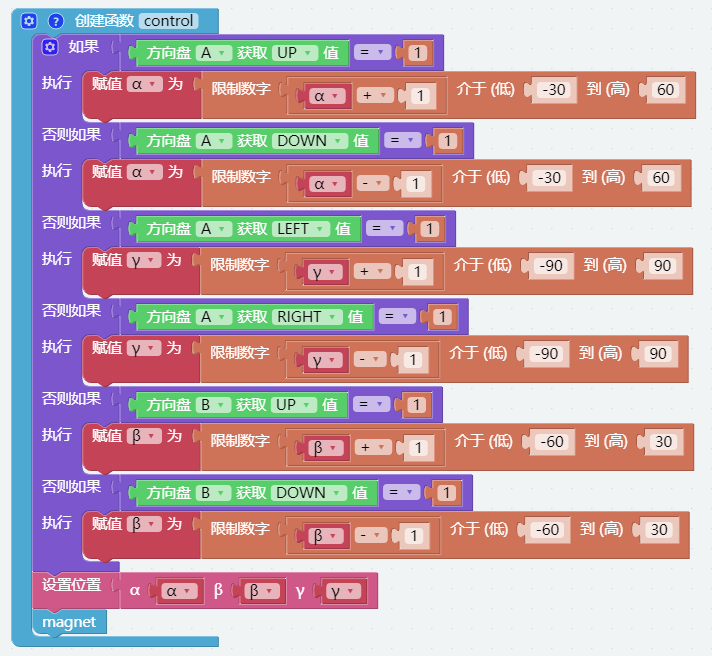
创建一个叫做 [control] 函数用来实现让D-pad A和D-pad B的上下来控制Arm of PiArm。
如果按下方向盘 A 的上按钮 (▲),则让 PiArm 向前伸长。
如果按下方向盘 A 的下按钮 (▼),则让 PiArm 向后缩回。
如果按下方向盘 A 的左按钮 (◀),则让 PiArm 向左转动。
如果按下方向盘 A 的右按钮 (▶),则让 PiArm 向右转动。
如果按下方向盘 B 的上按钮 (▲),则让 PiArm 向上抬起。
如果按下方向盘 B 的下按钮 (▼),则让 PiArm 向下降低。
注解
α,βandγ表示 PiArm 手臂上三个舵机的旋转角度范围, 可参考: 角度模式.[限制数字...介于(低)...到(高)...]: 可以在数学类中找到,用于设置一个变量的变化范围。
[否则如果]: 用于条件判断的代码块, 可以点击设置图标将 [否则] 或 [否则如果] 拖拽到 [如果] 下方来创建多个条件判断。
第五步
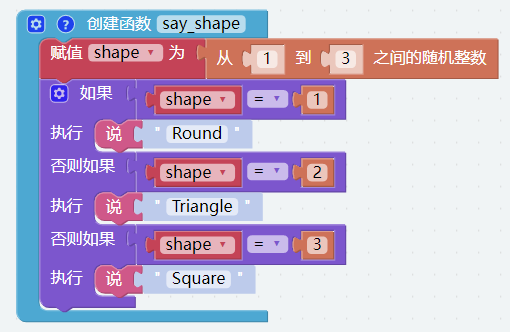
创建函数 [say_shape],让PiArm随机说一个形状。
第六步
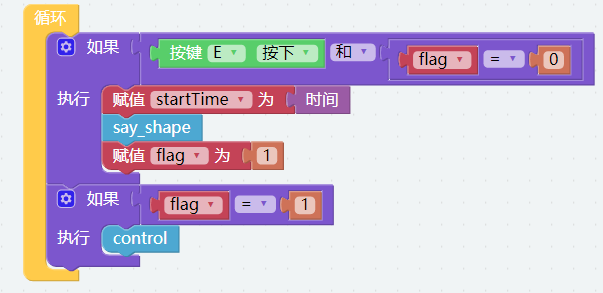
设置代码的主要流程:当按键 E 按下时,开始计时,此时PiArm会随机说一个形状。变量 flag 等于一时表示开始计时并可以控制PiArm了。
第七步
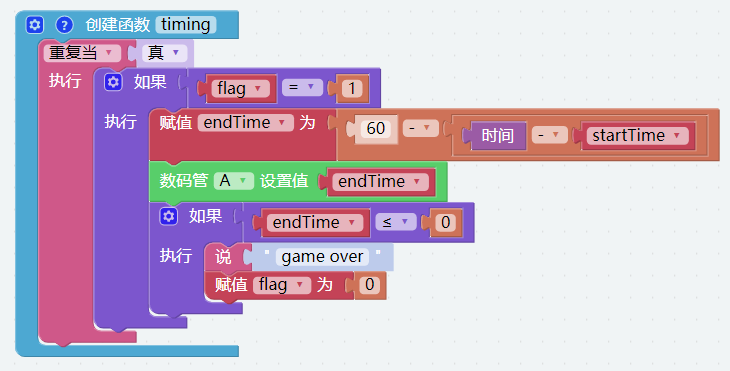
创建一个名为 [timing] 的函数以用于计时。游戏时间设定为 60 秒,时间到了之后,PiArm 将用语音播报游戏结束,并且你将无法再控制它。
这里的 [timing] 函数不同于上一个项目,我们在这里用到了 [时间] 模块来进行计时,在循环里面当判断出按键E被按下时,计时开始,[时间 - startTime] 代码块表示从计时开始到现在过去了多少秒。
第八步
让 [timing] 函数在单独的线程中运行。这可以让您在计时的同时控制 PiArm。
完整代码如下: