安装并测试三个臂端工具¶
这是第一个项目,将教会您如何组装和使用 PiArm 的三个臂端工具。
基本代码块提示¶
程序的基本结构由下面两个代码块构成, [开始] 代码块用于做一些初始化(里面没有放置代码块也不能删除)) 而 [循环] 顾名思义是一个连续的循环从而保证程序一直响应。

下面这个代码块用于设置程序的间隔时间,单位为毫秒。

铲斗¶
组装 铲斗。
开始编写代码来使铲斗动起来。
把 [初始化铲斗引脚为P3] 代码块放入 [开始] 块中从而将铲斗的引脚初始化为P3。
注解
因为在组装图中,臂端工具的舵机是连接的P3引脚,当然你也可以自己接到其它的备用引脚。
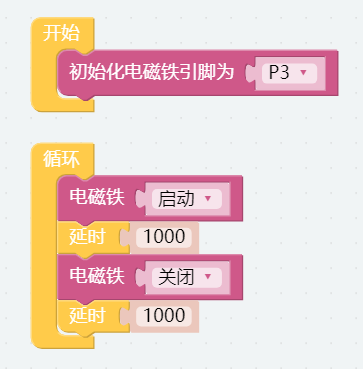
每隔一秒钟将铲斗从-60转动到90°,再往复。
[设置铲斗回卷至角度 ()]: 用于设置铲斗角度,舵机本身的旋转角度是-90 ~ 90,但由于结构限制,最终的角度范围是-90 ~ 60。
[延时 ()]: 从 基本 类别中可以找到, 用于设置两个代码块之间的运行间隔时间,单位为毫秒。

搭建完代码之后,单击右下角的 下载 按钮将其下载到 PiArm 中。然后你就可以看见铲斗在来回移动,可以单击运行按钮来停止运行代码。
注解
如果你发现舵机为0时,铲斗不是垂直向下的,需要松开舵机螺钉,再重新将铲斗以垂直向下的角度安装一遍。

竖直夹¶
组装 竖直夹。
然后搭建代码块来让竖直夹动起来。
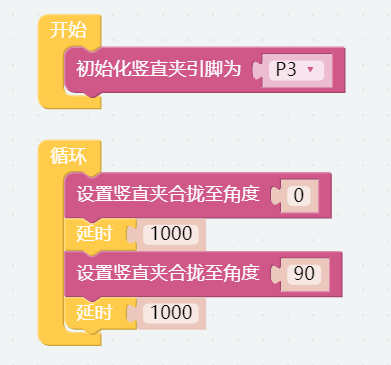
将 [初始化竖直夹引脚为P3] 代码块放到 [开始] 块中使竖直夹的引脚初始化为P3.
注解
因为在组装图中,臂端工具的舵机是连接的P3引脚,当然你也可以自己接到其它的备用引脚。
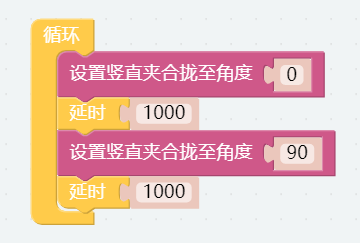
每隔一秒让竖直夹在0°到90°的范围里来回移动。
[设置数值夹合拢至角度()]: 用于设置竖直夹的角度,范围0-90度。
[延时()]: 从 基本 类别中可以找到, 用于设置两个代码块之间的运行间隔时间,单位为毫秒。
搭建完代码之后,单击右下角的 下载 按钮将其下载到 PiArm 中。然后你就可以看见竖直夹在不断张合,可以单击运行按钮来停止运行代码。
注解
如果你发现竖直夹在90°时,不是垂直向下并合拢。需要将竖直夹的固定螺钉取下,重新再安装一遍。