双摇杆模块¶
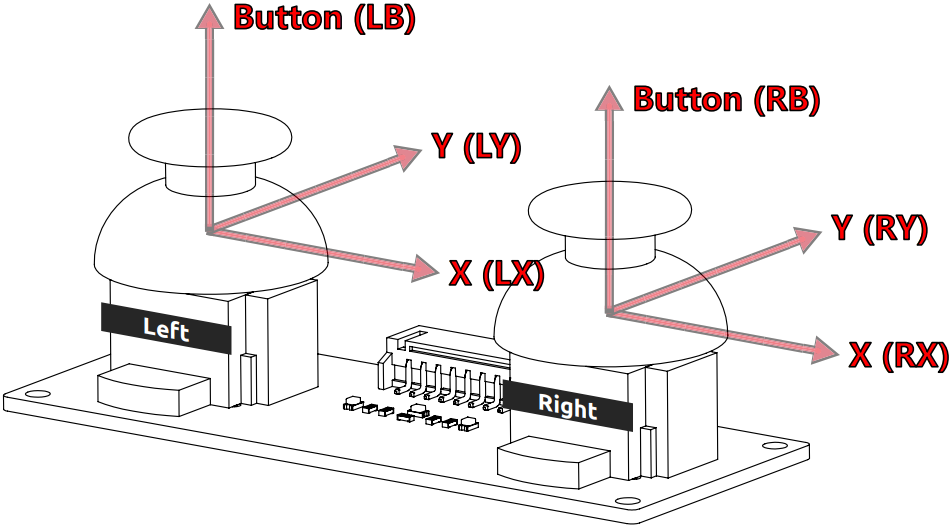
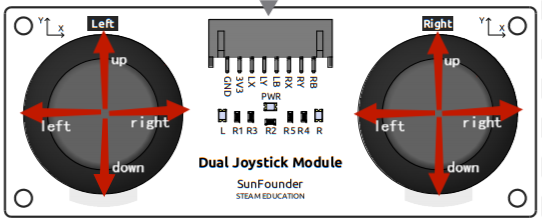
双摇杆模块,顾名思义,由两个摇杆组成,每个摇杆可以在X、Y和Z方向输出电信号。
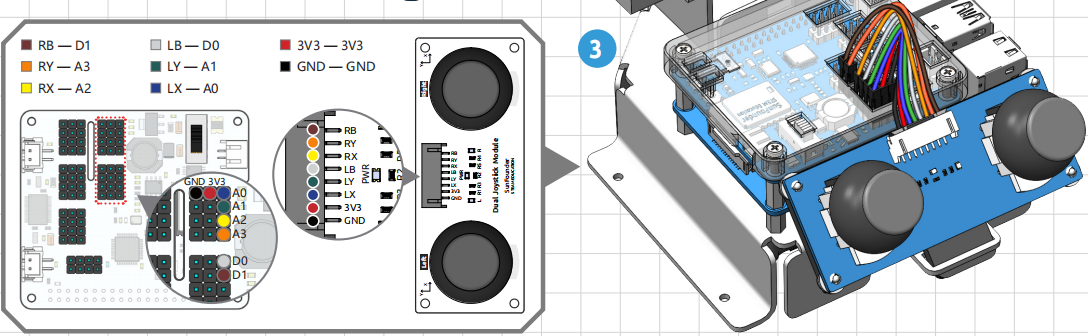
在使用双摇杆模块之前,你需要把它的8根线连接到Robot HAT的相应引脚上,如下图所示。
摇杆读数范围在0~4095的平面坐标系中,原点(0,0)在左下角。
举个例子,不推动摇杆时的坐标值为(2048,2048)。如果将摇杆向左推动,坐标为 (0,2048)。当向下推动摇杆时,坐标为 (2048,0),如下所示。
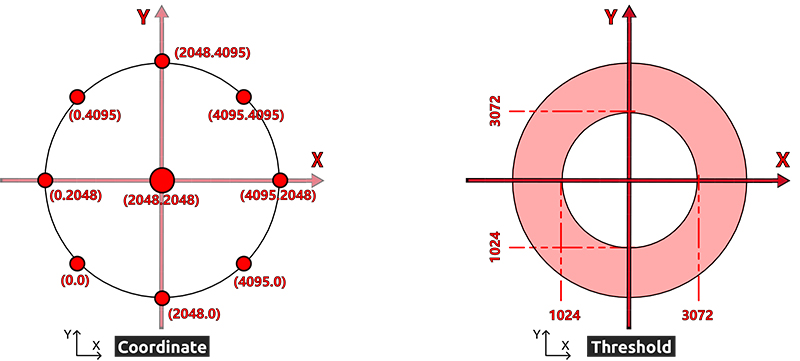
但是电信号容易波动,很难得到绝对稳定的读数,所以我们通常会设置一个数值区间来判断摇杆目前所处位置。
建议边界值设为3072和1024。当摇杆的读数大于3072时,认为摇杆是向上(或向右)推动;如果读数小于 1024,则认为摇杆杆向下(或向左)推动。
注解
在用Python库中,已经将这些值处理成方向指示,如下图所示:
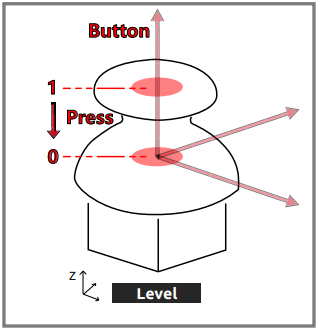
Z轴按钮按下时输出低电平(0),松开时输出高电平(1)。