游戏 - 抓娃娃¶
现在让我们玩一个抓娃娃的游戏,看看谁能在给定的时间内用 PiArm 抓到更多的娃娃。为了玩这个游戏,我们需要实现两个功能,第一个是用双摇杆模块控制PiArm,第二个是计时,当倒计时结束时,我们便不能继续PiArm了。这两部分必须同时进行。

编程¶
第一步
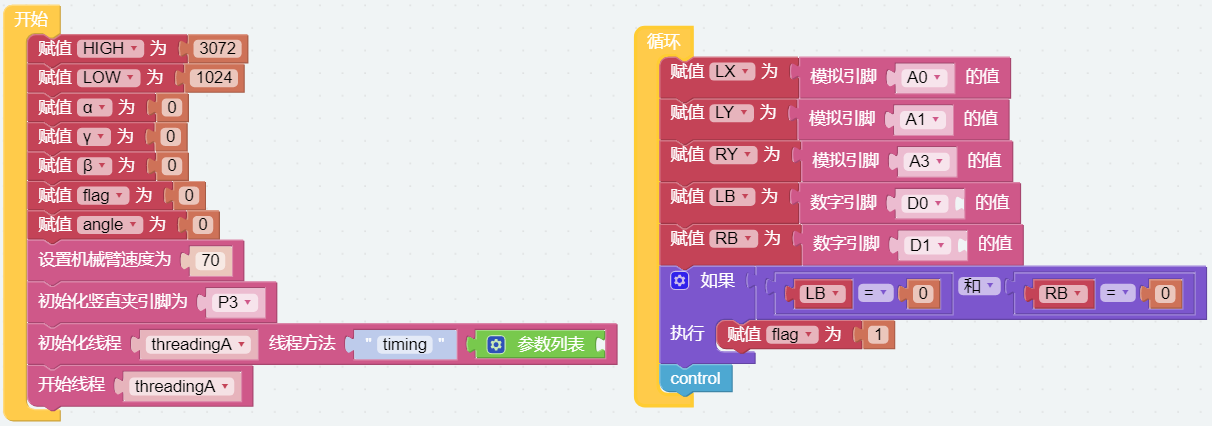
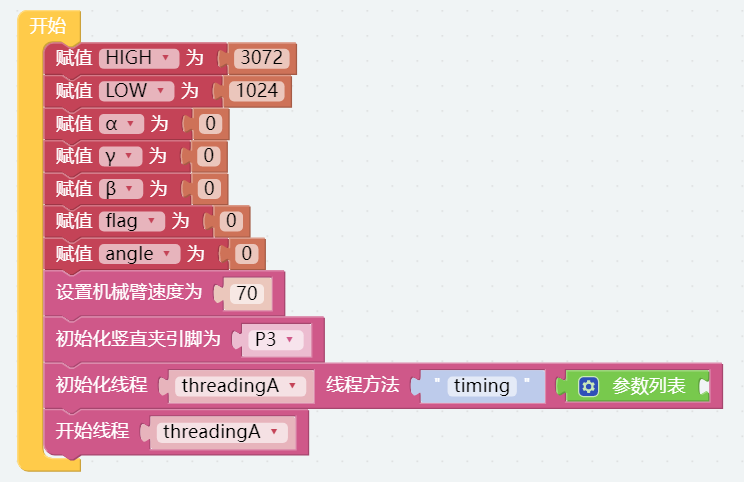
创建变量 (HIGH, LOW, α, β, γ, flag, angle) 并为它们设置初始值。然后初始化 PiArm 旋转速度和竖直夹的引脚。
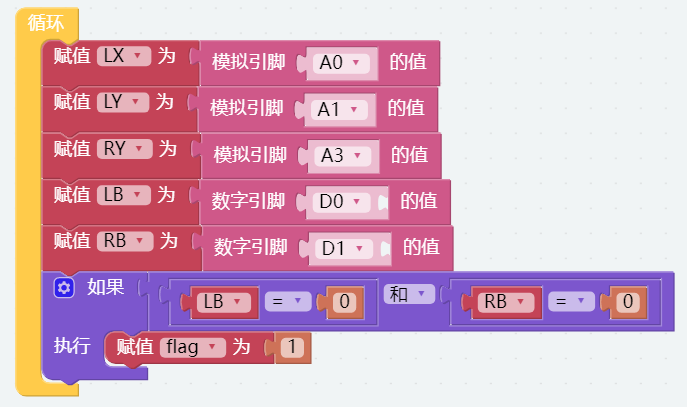
第二步
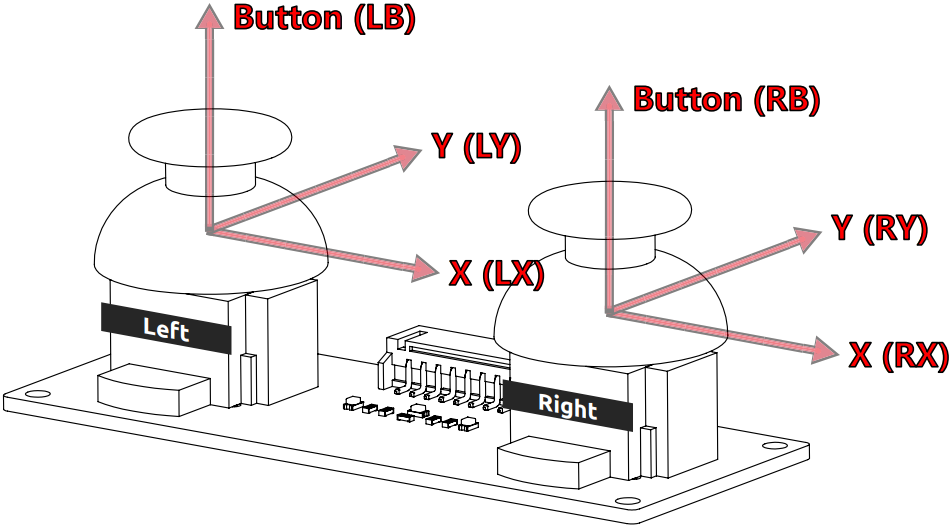
创建另外五个变量 (LX, LY, RY, LB, RB) 来分别读取双摇杆模块的 X、Y 轴和按下的值。

第三步
当LB和RB同时读取为0,表示左右摇杆被按下,此时游戏开始,同时计时并设置flag为1。
第四步
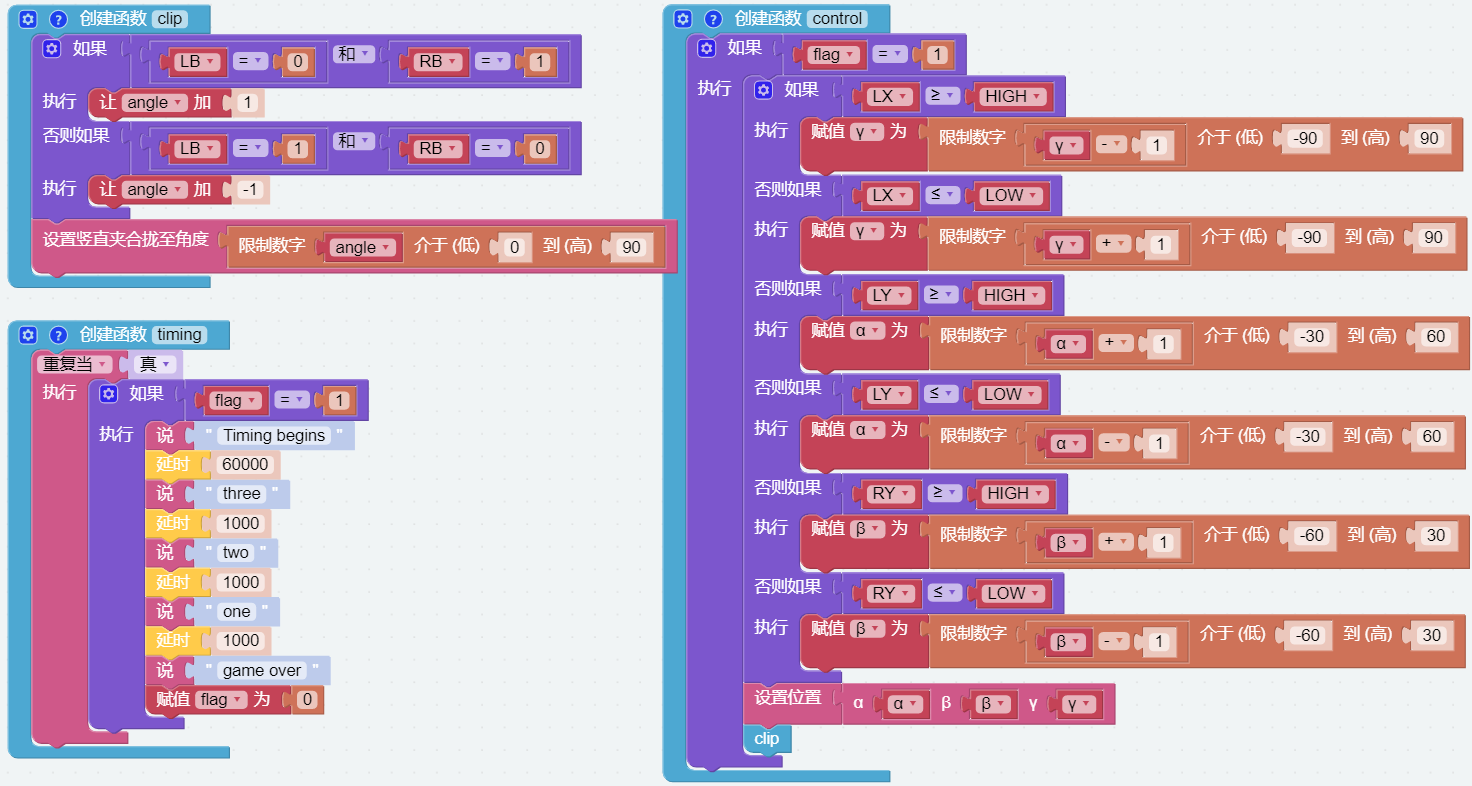
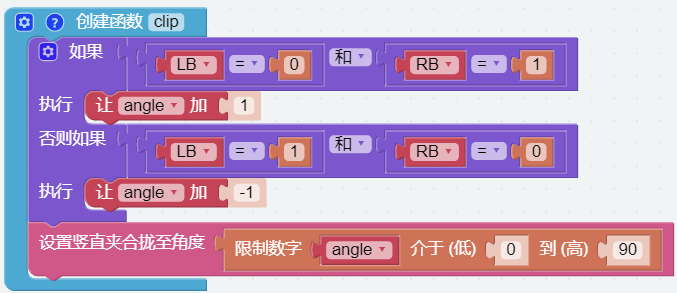
创建一个名为 [clip] 的函数来控制 竖直夹。
当按下左摇杆时,竖直夹会慢慢夹紧。
当按下右摇杆时,竖直夹会慢慢松开。
第五步
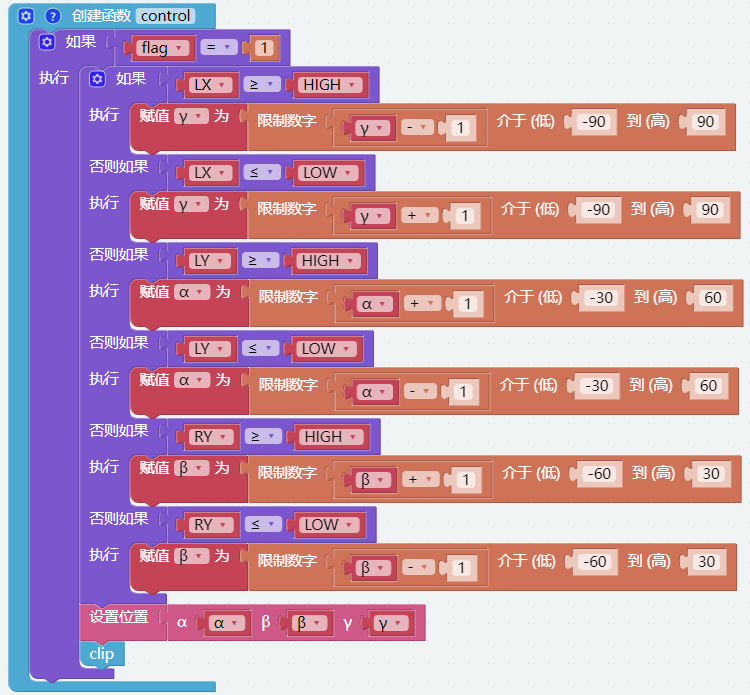
参考双摇杆模块创建一个函数 [control] 来设置PiArm的移动方向。
当flag为1时,表示游戏开始。这时候就可以开始控制PiArm了。
如果 左摇杆 (
LX)向右推动, 则让 PiArm 向右转动。如果 左摇杆 (
LX)向左推动, 则让 PiArm 向左转动。如果 左摇杆 (
LY)向前推动, 则让 PiArm 向前伸长。如果 左摇杆 (
LY)向后推动, 则让 PiArm 向后缩回。如果 右摇杆 (
RX)向前推动, 则让 PiArm 向上抬高。如果 右摇杆 (
RY)向后推动, 则让 PiArm 向下降低。竖直夹的控制代码也在这里被调用。这可以让您同时控制 PiArm 的手臂和竖直夹部分
第六步
将 [control] 函数块放入 [循环] 代码块中。

第七步
创建一个名为 [timing] 的函数以用于计时。游戏时间设置为60秒(60000),最后3秒会响起倒计时,让你知道时间快到了。

第八步
让 [timing] 函数在单独的线程中运行。这可以让您在记时的同时控制 PiArm。
完整代码如下:
注解
您也可以在Ezblock Studio的 示例 页面找到同名的代码,直接点击运行或编辑查看代码块。