Note
Bonjour, bienvenue dans la communauté des passionnés de SunFounder Raspberry Pi, Arduino et ESP32 sur Facebook ! Plongez au cœur de Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques grâce à l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des conseils et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et à des aperçus privilégiés.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et concours : Participez à des concours et des promotions durant les fêtes.
👉 Prêt à explorer et à créer avec nous ? Cliquez sur [ici] et rejoignez-nous dès aujourd’hui !
Jeu Rapide avec l’APP
Prêt à commencer votre aventure sur Mars ? Avec la fonction de démarrage rapide de l’application RoboPilot, vous pouvez commencer à explorer dès que votre GalaxyRVR est assemblé.
Avec RoboPilot, vous pouvez :
Piloter le rover depuis une perspective à la première personne
Basculer entre trois modes de contrôle : Remote, Avoid et Follow
Note
Si vous avez écrasé le firmware et devez restaurer la communication, suivez 3. Mise à jour du firmware de la carte R3.
Guide rapide
Démarrez le GalaxyRVR.
Avant d’utiliser le GalaxyRVR pour la première fois, chargez complètement la batterie avec le câble USB Type-C fourni.
Mettez l’interrupteur d’alimentation en marche.
Passez le mode sur Run et appuyez sur le bouton Reset de la carte R3.
La bande lumineuse inférieure clignotera en vert, indiquant un démarrage réussi.
Installez RoboPilot depuis l”APP Store(iOS) ou Google Play(Android).
Connectez votre appareil mobile au réseau WiFi du GalaxyRVR.
Le nom du réseau (SSID) est
GalaxyRVRet le mot de passe est12345678.Si vous voyez un avertissement indiquant « Aucun accès Internet », veuillez choisir l’option « Rester connecté ».

Ouvrez RoboPilot. Cliquez sur “Go into” pour entrer dans l’interface de contrôle.

Mode Remote
En entrant dans l’interface de contrôle, vous verrez l’écran suivant. L’arrière-plan montre la vue capturée par la caméra du GalaxyRVR, avec des widgets de contrôle à distance superposés.
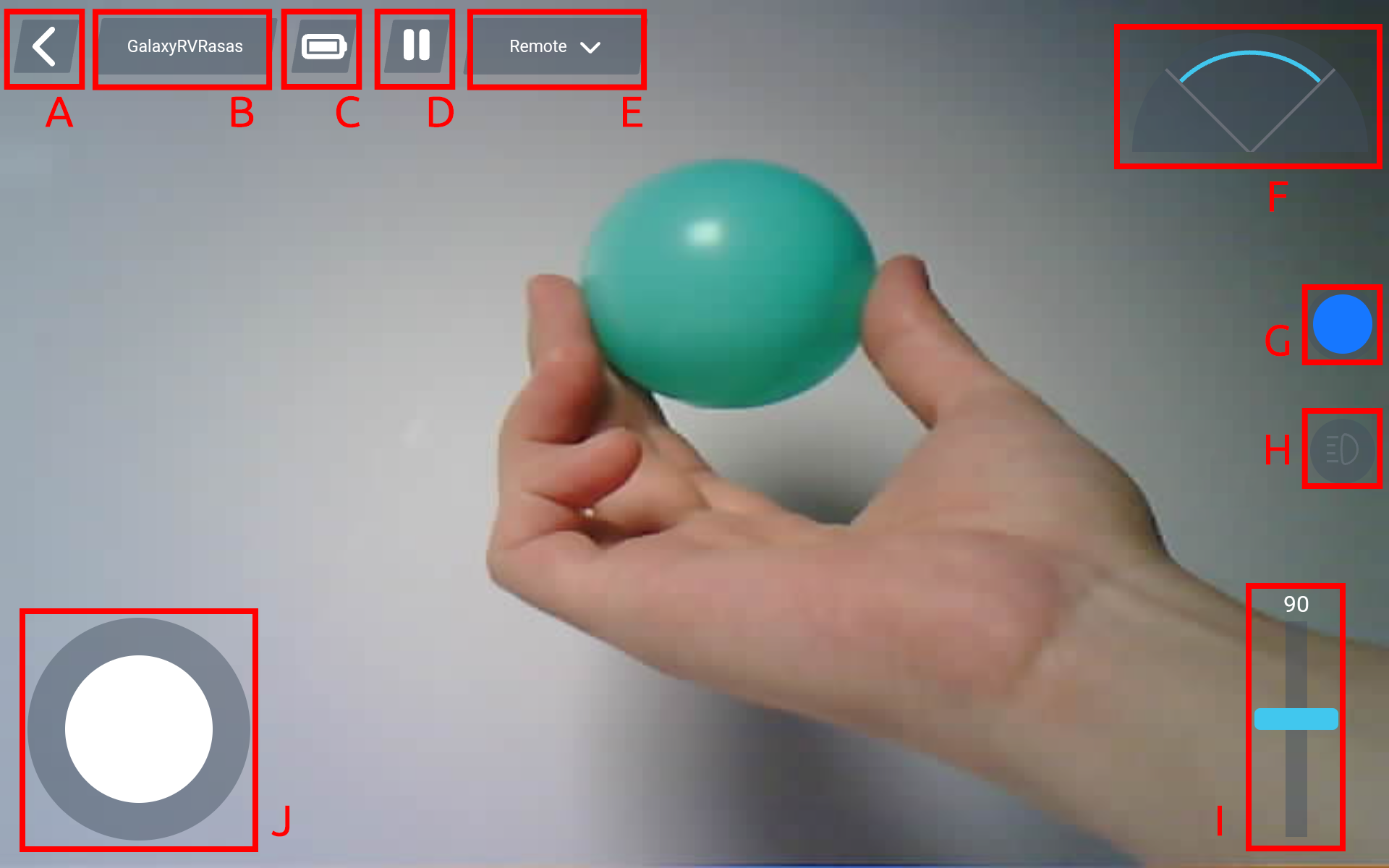
Voici les contrôles :
Retour
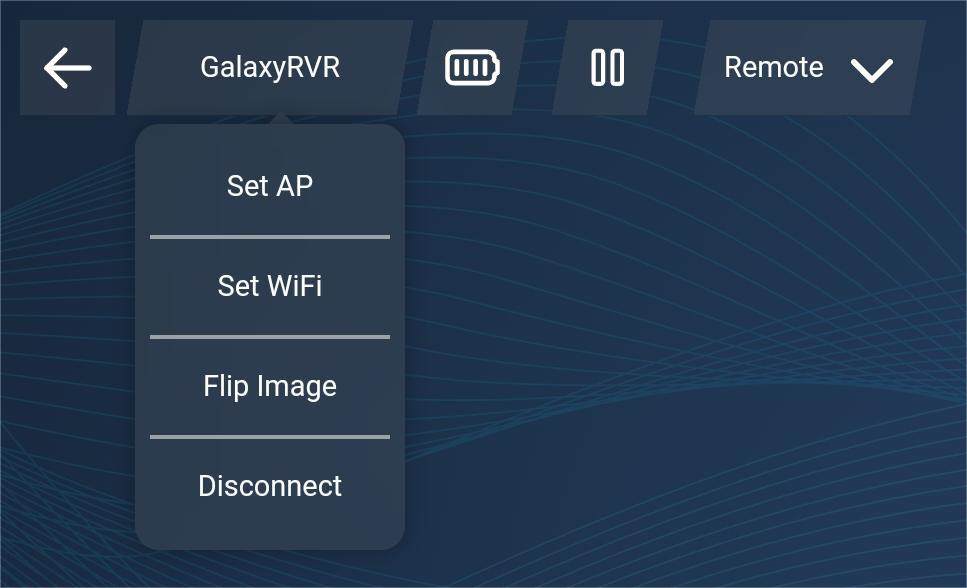
Paramètres : Vous pouvez ici changer le nom et le mot de passe de l’AP (hotspot), configurer le WiFi, retourner l’image et vous déconnecter.
Indicateur de niveau de batterie
Pause/Exécuter l’APP
Sélection du mode : Vous pouvez choisir ici entre le Mode Remote, le Mode Avoid et le Mode Follow. Le paramètre par défaut est le Mode Remote.

Moniteur d’obstacles : Ce module est divisé en trois zones, les côtés gauche et droit affichant les résultats des modules d’obstacles, et la zone centrale affichant les résultats du capteur à ultrasons.
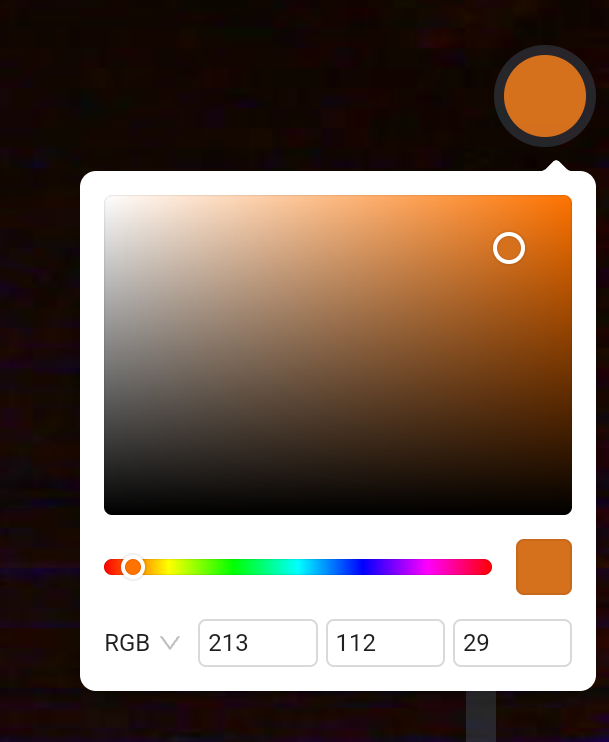
Sélecteur de couleur : Choisissez ici la couleur d’éclairage du châssis.
Interrupteur LED de la caméra.
Réglez l’angle du gimbal, allant de 0 à 130°. À 0°, il regarde vers le ciel.
Déplacez le joystick pour contrôler le mouvement du GalaxyRVR. Une poussée douce fera avancer le GalaxyRVR lentement.
Mode Avoid et Mode Follow
Mode Avoid : le GalaxyRVR avancera et évitera les obstacles sur son chemin.
Mode Follow : le GalaxyRVR se déplacera vers un objet devant lui ou tournera à gauche ou à droite pour suivre le mouvement de l’objet.
Lorsque vous sélectionnez le Mode Avoid ou le Mode Follow, vous verrez l’interface ci-dessous. La vue en direct de la caméra du GalaxyRVR forme l’arrière-plan, avec des options de contrôle superposées.
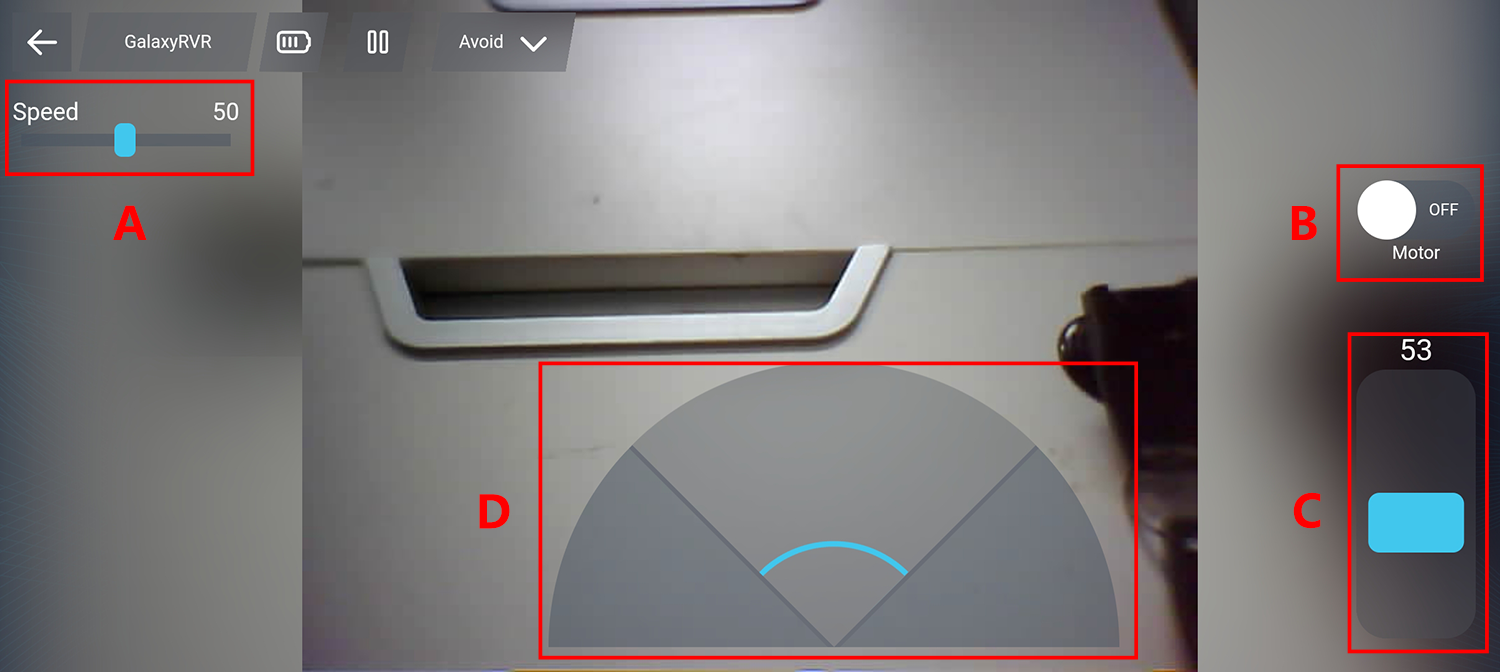
Contrôles de l’interface :
Contrôle de vitesse - Réglez la vitesse de déplacement du GalaxyRVR
Contrôle du moteur - Démarrez ou arrêtez le mouvement du GalaxyRVR
Contrôle du gimbal - Réglez l’angle de la caméra de 0° (face au ciel) à 130°
Moniteur d’obstacles - Retour visuel des capteurs :
Sections gauche/droite : Détection d’obstacles infrarouge
Section centrale : Mesures de distance à ultrasons
Réglage de la portée de détection d’obstacles
Avant d’utiliser ce mode, calibrez la portée de détection des capteurs pour l’adapter à votre environnement. Les paramètres d’usine peuvent ne pas être optimaux.
Trop courte : Le rover peut heurter des obstacles
Trop longue : Le rover peut braquer inutilement
Étapes de calibration :
Commencez par le module droit
Assurez-vous que l’émetteur/récepteur sont correctement alignés
Redressez-les s’ils ont été pliés pendant le transport
Testez et réglez la sensibilité
Placez un obstacle à 20 cm (utilisez la boîte du Rover)
Tournez le potentiomètre jusqu’à ce que l’indicateur s’allume
Vérifiez l’activation constante à la distance souhaitée
Utilisez le deuxième potentiomètre si nécessaire
Répétez pour le module gauche
Reconnexion
Si votre réseau échoue ou se déconnecte, vous serez dirigé vers cette page.
À ce stade, veuillez réinitialiser vos paramètres réseau, puis cliquez sur l’IP correspondant à votre GalaxyRVR pour vous reconnecter.