Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche gemeinsam mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Löse After-Sales-Probleme und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Peeks.
Spezielle Rabatte: Genieße exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nimm an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu erschaffen? Klicke auf [here] und tritt noch heute bei!
Schnittstellen
Pinbelegung
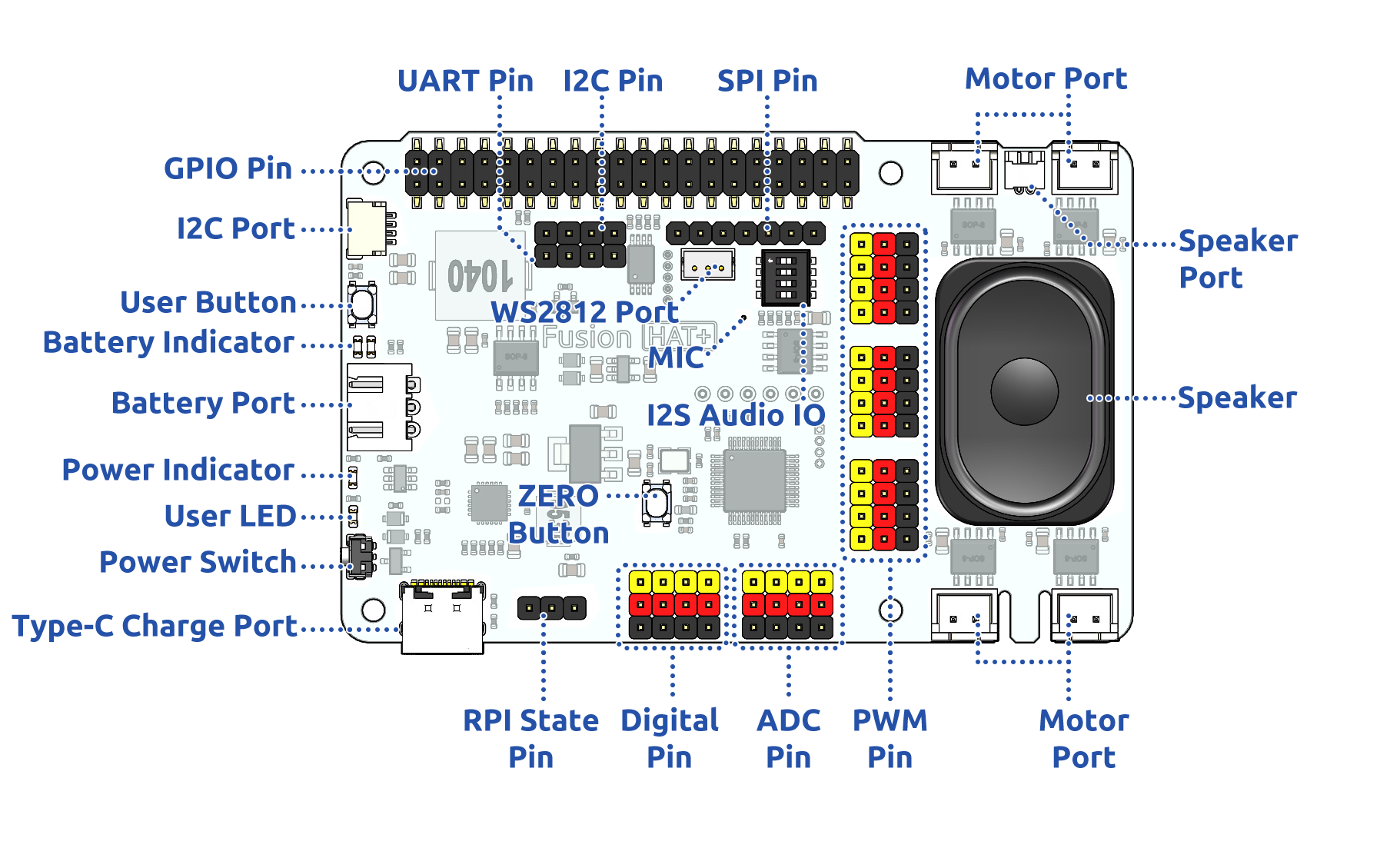
- Batterieanschluss
6,0 V – 8,4 V XH2.54 3-Pin-Stromeingang.
Versorgt den Raspberry Pi und den Fusion HAT+ gleichzeitig mit Strom.
- Netzschalter
Schaltet die Stromversorgung des Fusion HAT+ ein oder aus.
- Type-C-Ladeanschluss
Stecke das Type-C-Kabel ein, um den Akku zu laden.
Während des Ladevorgangs blinkt die entsprechende Akkuanzeige.
Das vollständige Laden dauert ungefähr 2 Stunden. Nach dem vollständigen Aufladen leuchten, wenn der Fusion HAT eingeschaltet ist, beide Akkuanzeigen dauerhaft. Wenn der Fusion HAT ausgeschaltet ist, gehen beide Akkuanzeigen aus.
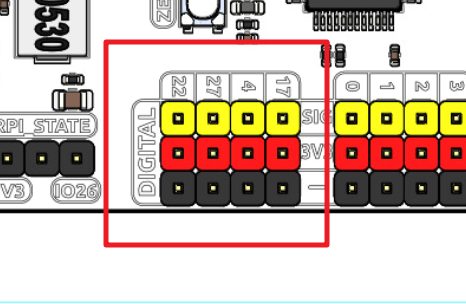
- Digital-Pin
4-kanalige Digital-Pins: 17, 4, 27, 22.
Pin: Digital IO.
API:
fusion_hat.pin.Pin.
- ADC-Pin
4-kanalige ADC-Pins: A0–A3.
Pin: ADC.
API:
fusion_hat.adc.ADC.
- PWM-Pin
12-kanalige PWM-Pins: P0–P11.
Pin: PWM.
API:
fusion_hat.pwm.PWM.
- Motoranschluss
4-kanalige XH2.54-Motoranschlüsse.
Pin: Motoranschluss.
API:
fusion_hat.motor.Motor.
- I2C-Pin und I2C-Port
I2C-Pin: P2.54 4-Pin-Schnittstelle.
I2C-Port: SH1.0 4-Pin-Schnittstelle, kompatibel mit QWIIC und STEMMA QT.
Diese I2C-Schnittstellen sind über GPIO2 ( SDA ) und GPIO3 ( SCL ) mit der I2C-Schnittstelle des Raspberry Pi verbunden.
Pin: I2C.
API:
fusion_hat._i2c.I2C.
- SPI-Pin
P2.54 7-Pin-SPI-Schnittstelle.
Pin: SPI.
- UART-Pin
P2.54 4-Pin-Schnittstelle.
Pin: UART.
- WS2812-Port
1-kanaliger WS2812-Port.
Pin: WS2812-Port.
- Benutzer-LED
Die Funktionen der Benutzer-LED können durch deine Programmierung festgelegt werden.
Pin: Benutzertaste und LED.
- USR-Taste
Die Funktionen der USR-Taste können durch deine Programmierung festgelegt werden. ( Drücken erzeugt eine Eingabe „0“; Loslassen erzeugt eine Eingabe „1“. )
Pin: Benutzertaste und LED.
- Akkuanzeige
Zwei LEDs leuchten, wenn die Spannung höher als 7,6 V ist.
Eine LED leuchtet im Bereich von 7,15 V bis 7,6 V.
Unter 7,15 V gehen beide LEDs aus.
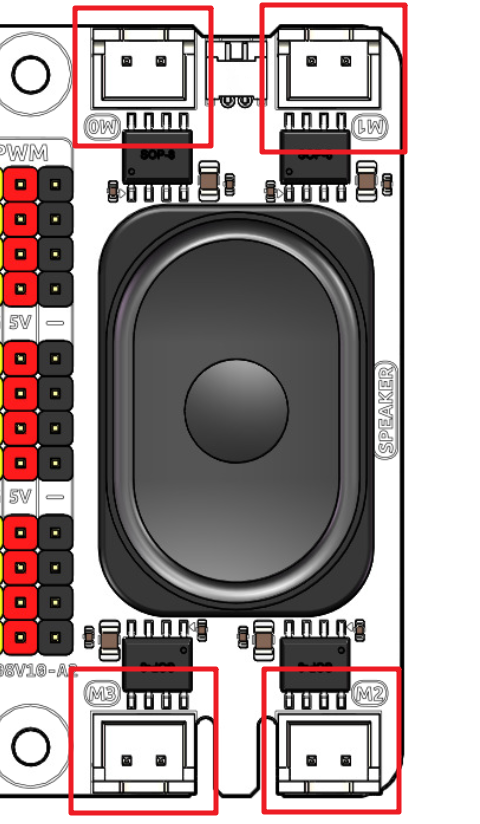
- Lautsprecher und MIC
Lautsprecher: Dies ist ein 2030-Audiokammer-Lautsprecher.
Lautsprecheranschluss: Der Fusion HAT+ ist mit einem Onboard-I2S-Audioausgang sowie einem 2030-Audiokammer-Lautsprecher ausgestattet und bietet eine Mono-Tonausgabe.
MIC: Der Fusion HAT+ ist mit einem MEMS-Mikrofon ausgestattet, das zur Aufnahme von Umgebungsgeräuschen verwendet werden kann.
Pin: Lautsprecher und MIC.
API:
fusion_hat.music.Music.
Pin-Zuordnung
Fusion HAT+ |
Raspberry Pi |
Raspberry Pi |
Fusion HAT+ |
|---|---|---|---|
POWER OFF DETECT* |
3V3 |
5V |
5V |
SDA |
SDA |
5V |
5V |
SCL |
SCL |
GND |
GND |
DIGITAL 4 |
GPIO4 |
TXD |
TXD |
GND |
GND |
RXD |
RXD |
DIGITAL 17 |
GPIO17 |
GPIO18 |
I2S BCLK |
DIGITAL 27 |
GPIO27 |
GND |
GND |
DIGITAL 22 |
GPIO22 |
GPIO23 |
NC |
ID EEPROM |
3V3 |
GPIO24 |
NC |
SPI MOSI / WS2812 DOUT |
MOSI |
GND |
GND |
SPI MISO |
MISO |
GPIO25 |
NC |
SPI SCLK |
SCLK |
CE0 |
SPI CE0 |
GND |
GND |
CE1 |
NC |
NC |
ID_SD |
ID_SC |
NC |
NC |
GPIO5 |
GND |
GND |
( SPI ) BSY |
GPIO6 |
GPIO12 |
NC |
NC |
GPIO13 |
GND |
GND |
I2S LRCLK |
GPIO19 |
GPIO16 |
NC |
POWER OFF DETECT* |
GPIO26 |
GPIO20 |
I2S Speaker Enable |
GND |
GND |
GPIO21 |
I2S DATAOUT |
Digital IO
Der Fusion HAT+ hat 4 Gruppen von P2.54 3-Pin-Digital-Pins.
Fusion HAT+ |
Raspberry Pi |
|---|---|
17 |
GPIO17 |
4 |
GPIO4 |
27 |
GPIO27 |
22 |
GPIO22 |
ADC
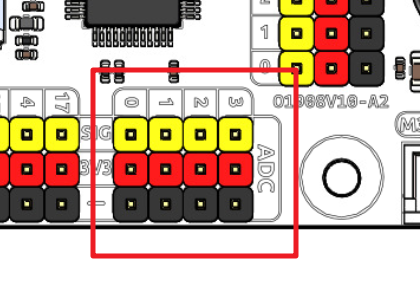
Der Fusion HAT+ verfügt über vier Gruppen von 3-Pin-ADC- ( Analog-Digital-Wandler ) Pins, jeweils mit einem Abstand von 2,54 mm. Diese Pins werden mit 3,3 V betrieben. Die ADC-Funktion mit 12-Bit-Präzision wird durch einen Onboard-Mikrocontroller realisiert. Detaillierte Anweisungen zum Auslesen von ADC-Werten findest du im Abschnitt Onboard-MCU.
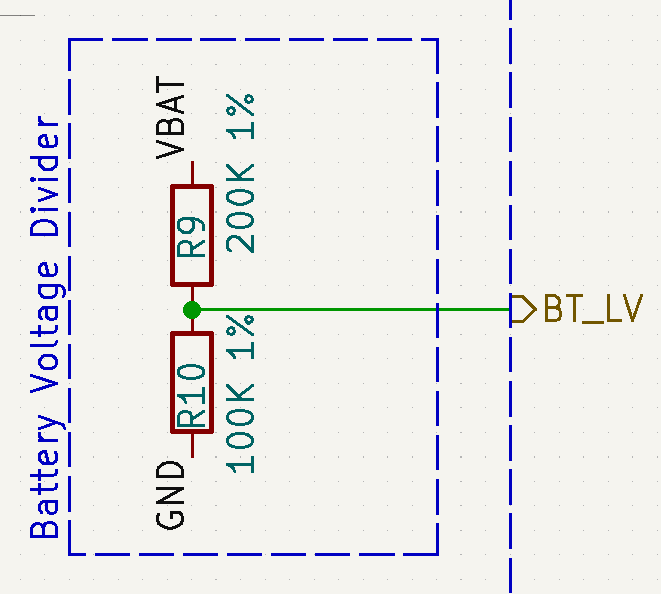
Außerdem ist der ADC-Kanal A4 über einen Spannungsteiler mit Widerständen mit der Batterie verbunden. Er wird verwendet, um die Batteriespannung zu messen und so den ungefähren Ladezustand zu schätzen.
Das Spannungsteilerverhältnis beträgt 200 K / 100 K, daher:
A4-Spannung ( Va4 ) = value_A4 / 4095.0 * 3.3
Batteriespannung ( Vbat ) = Va4 * 3
Batteriespannung ( Vbat ) = value_A4 / 4095.0 * 3.3 * 3
PWM
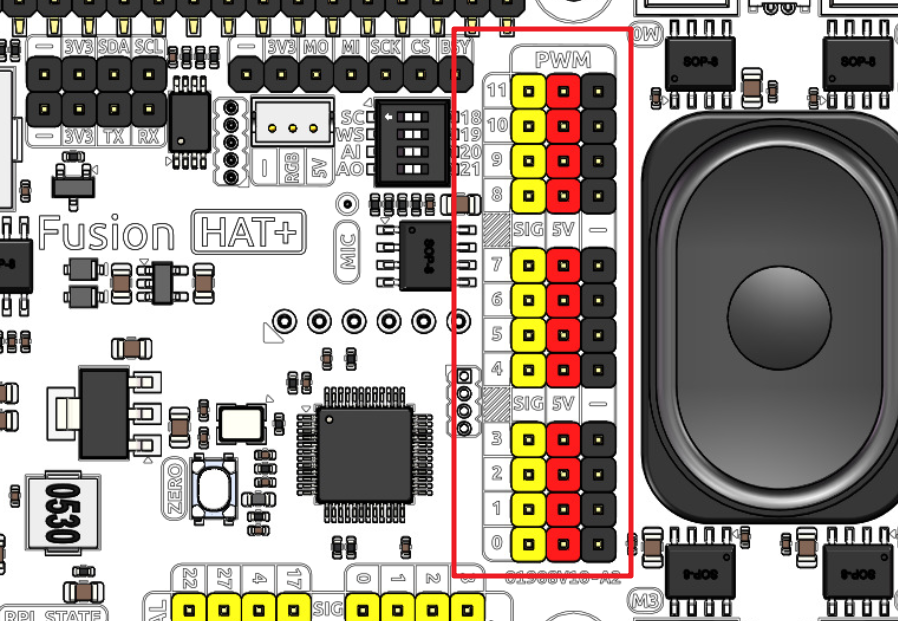
Der Fusion HAT+ verfügt über 4 Gruppen von 3-Pin-PWM-Pins, jeweils mit einem Abstand von 2,54 mm, und die Versorgungsspannung beträgt 5 V. Die Verwendung von PWM wird im Abschnitt Onboard-MCU ausführlich beschrieben.
Bemerkung
Die Kanäle PWM4 bis PWM11 werden für den Motorantrieb verwendet.
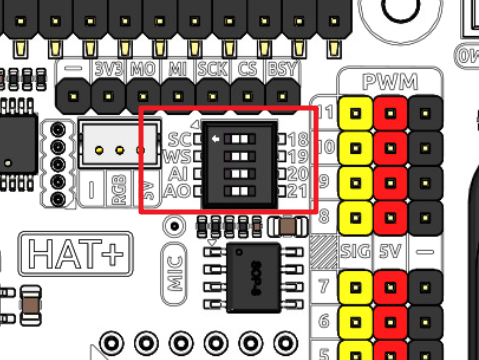
I2C
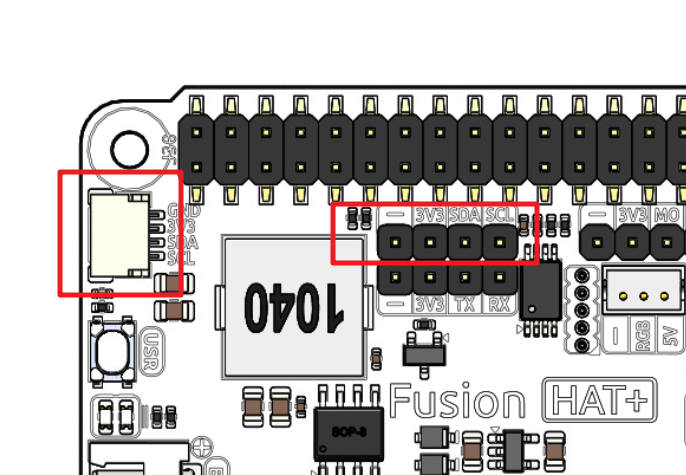
Der Fusion HAT+ besitzt zwei I2C-Schnittstellen. Eine ist die P2.54-4-Pin-Schnittstelle, die andere ist die SH1.0-4-Pin-Schnittstelle, die mit QWIIC und STEMMA QT kompatibel ist. Diese I2C-Schnittstellen sind über GPIO2 ( SDA ) und GPIO3 ( SCL ) mit der I2C-Schnittstelle des Raspberry Pi verbunden. Das Board verfügt außerdem über einen Onboard-MCU, und die beiden Signalleitungen besitzen 10-K-Pull-up-Widerstände.
SPI
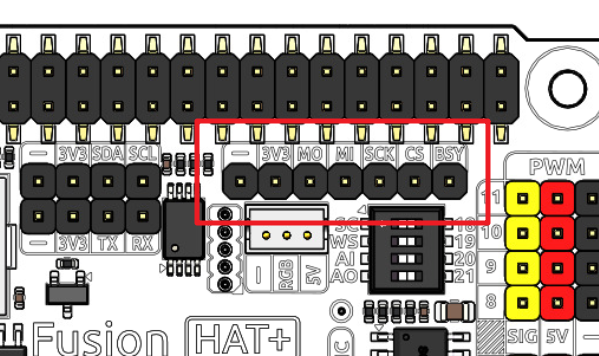
Die SPI-Schnittstelle des Fusion HAT+ ist eine 7-Pin-P2.54-Schnittstelle. Sie ist mit der SPI-Schnittstelle des Raspberry Pi verbunden und enthält einen zusätzlichen I/O-Pin, der z. B. für Interrupts oder Resets verwendet werden kann.
Fusion HAT+ |
Raspberry Pi |
|---|---|
BSY |
GPIO6 |
CS |
CE0 ( GPIO8 ) |
SCK |
SCLK ( GPIO11 ) |
MI |
MISO ( GPIO9 ) |
MO |
MOSI ( GPIO10 ) |
3V3 |
3,3-V-Stromversorgung |
GND |
Masse |
UART
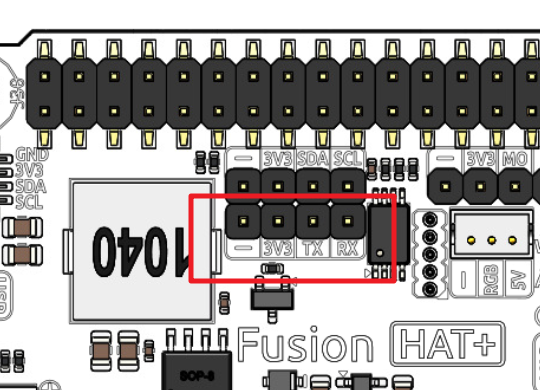
Die UART-Schnittstelle des Fusion HAT+ ist eine 4-Pin-P2.54-Schnittstelle. Sie ist mit den Pins GPIO14 ( TXD ) und GPIO15 ( RXD ) des Raspberry Pi verbunden.
WS2812-Port
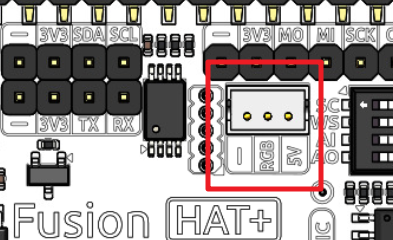
Der Fusion HAT+ verfügt über 1 WS2812-Port ( ZH1.5 3-Pin ), der zum Steuern von 1 WS2812-LED-Streifen verwendet werden kann.
Dieser Pin wird mit SPI MOSI gemeinsam genutzt, daher kann er nicht gleichzeitig als SPI MOSI verwendet werden.
Benutzertaste und LED
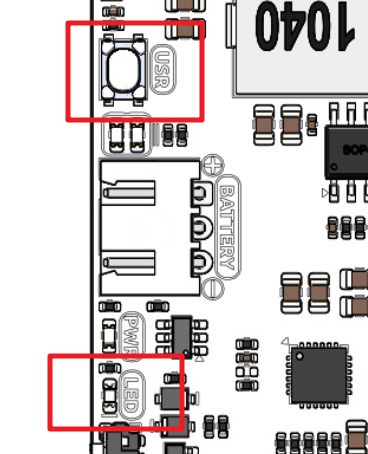
Der Fusion HAT+ verfügt über 1 LED und 1 Taste, die mit dem I2C-Chip verbunden sind und von ihm gesteuert werden.
Lautsprecher und MIC
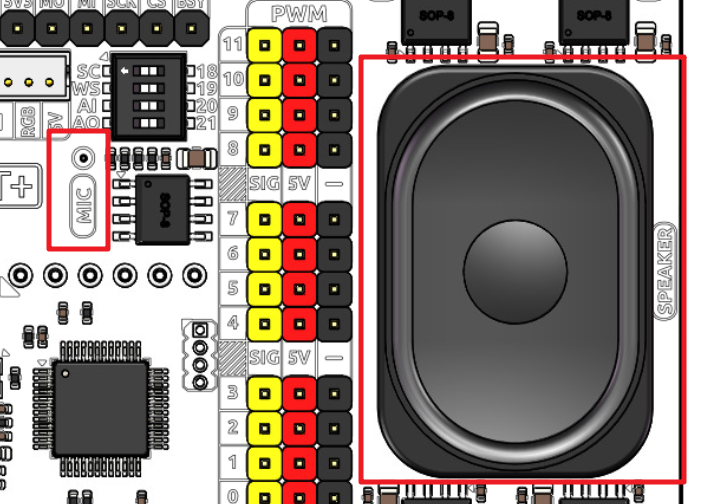
Der Fusion HAT+ ist mit Onboard-I2S-Audioausgang/-eingang sowie einem 2030-Audiokammer-Lautsprecher ausgestattet und bietet eine Mono-Tonausgabe. Das Onboard-Mikrofon kann zum Empfangen von Audiosignalen verwendet werden.
I2S |
Raspberry Pi |
|---|---|
WS |
GPIO19 |
SCLK |
GPIO18 |
Audio OUT ( Lautsprecher ) |
GPIO21 |
Audio IN ( MIC ) |
GPIO20 |
Wenn du die GPIO-Pins ohne die Audiofunktion verwenden möchtest, kannst du den integrierten Lautsprecher und das Mikrofon einfach über einen Schalter trennen. Es ist entscheidend, dass diese Trennung nur erfolgt, wenn die Audio-Komponenten inaktiv sind. Außerdem solltest du die Pins WS und SCLK niemals verändern, solange eine Audio-Komponente aktiv ist.
Motoranschluss
Der Motortreiber des Fusion HAT+ unterstützt 4 Kanäle und kann mit 8 PWM-Signalen zur Richtungs- und Geschwindigkeitssteuerung gesteuert werden.
Motor |
PWM |
|---|---|
Motor0 A |
PWM11 |
Motor0 B |
PWM10 |
Motor1 A |
PWM9 |
Motor1 B |
PWM8 |
Motor2 A |
PWM7 |
Motor2 B |
PWM6 |
Motor3 A |
PWM5 |
Motor3 B |
PWM4 |
Der Motorantriebsmodus ist wie folgt.
A |
B |
Richtung |
|---|---|---|
0 |
0 |
Standby |
PWM-Wert |
0 |
Vorwärts |
0 |
PWM-Wert |
Rückwärts |
PWM-Wert |
PWM-Wert |
Bremse |
Netztaste und PWR-Anzeige
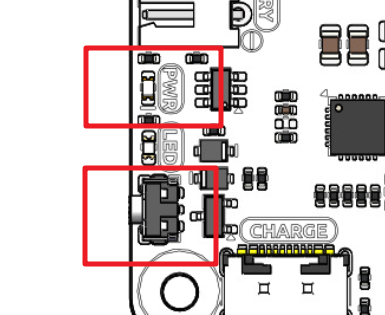
Durch einmaliges Drücken der Netztaste wird der Raspberry Pi eingeschaltet, und die PWR-Anzeige leuchtet.
Wenn du die Netztaste 2 Sekunden lang gedrückt hältst, wird ein Herunterfahrsignal an den Raspberry Pi gesendet. Wenn er korrekt konfiguriert ist, fährt der Raspberry Pi herunter und die PWR-Anzeige geht aus.
Wenn du die Netztaste 5 Sekunden lang gedrückt hältst, wird ein erzwungenes Herunterfahren ausgelöst, und die PWR-Anzeige geht sofort aus.
Zusätzlich verfügt der Fusion HAT+ über einen Sicheres Herunterfahren-Mechanismus. Er führt ein Software-Herunterfahren durch, indem der Registerstatus des Mikrocontrollers über I2C ausgelesen wird. Um diese Funktion zu aktivieren, musst du den Shutdown-Signal-Pin des Raspberry Pi konfigurieren und den entsprechenden Code auf dem Raspberry Pi ausführen.
Akkustandsanzeige
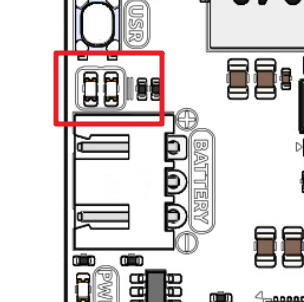
Die Akkustandsanzeige auf dem Fusion HAT+ überwacht die Batteriespannung mithilfe eines Spannungsteilers und dient als Referenz zur Abschätzung des Akkustands. Die Beziehung zwischen LED und Spannung ist wie folgt:
Akku-LED |
Gesamtspannung |
|---|---|
2 LEDs an |
Größer als 7,4 V |
1 LED an |
Größer als 6,5 V |
Beide LEDs aus |
Weniger als 6,5 V |
Beim Laden blinken die Akkuanzeigen. Der Ladestatus kann über I2C durch Zugriff auf den Mikrocontroller ausgelesen werden. Siehe Ladestatus für Details.
Wenn eine der Batterien 4,1 V erreicht oder überschreitet, während die anderen unter diesem Schwellenwert liegen, wird der Ladestrom dieser bestimmten Batterie reduziert.
Servo-Nullstell-Taste
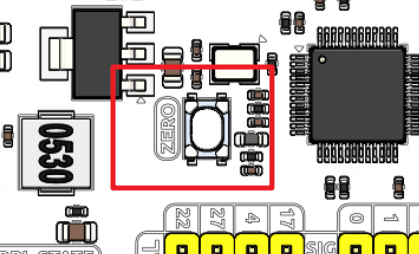
Die Servo-Nullstell-Taste wird verwendet, um die Nullposition des Servos zu kalibrieren.
Die PWM-Schnittstelle unterstützt die Servo-Nullstellung und erleichtert damit den Roboteraufbau. Bei der Servo-Nullstellung werden alle PWM-Schnittstellen auf eine Pulsbreite von 1500 µs bei einer Periode von 20.000 µs gesetzt, wodurch die Servos in die 90°-Position fahren. Es wird empfohlen, andere PWM-Geräte zu trennen, bevor du in den Servo-Nullstellmodus wechselst.
Wenn du die Taste zweimal drückst, werden alle PWM-Signale auf 1500 us Puls und 20000 us Periode gesetzt. Das heißt, der Servo befindet sich in der Mittelposition. In diesem Zustand solltest du den Servohebel am Servo befestigen.
Drücke die Taste erneut zweimal, dann werden alle PWM-Signale auf 0 Puls gesetzt.