Nota
Ciao e benvenuto nella SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi tecnici e post-vendita con l’aiuto della nostra comunità e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Accedi in anteprima agli annunci dei nuovi prodotti e alle anticipazioni.
Sconti speciali: Godi di sconti esclusivi sui nostri ultimi prodotti.
Promozioni e omaggi festivi: Partecipa a omaggi e promozioni durante le festività.
👉 Pronto per esplorare e creare con noi? Clicca [Qui] e unisciti oggi!
1.3.1 Motore
Introduzione
In questa lezione, impareremo a utilizzare l’L293D per controllare un motore DC, facendolo ruotare in senso orario e antiorario. Poiché il motore DC richiede una corrente elevata, per ragioni di sicurezza useremo il Modulo di Alimentazione per alimentare i motori.
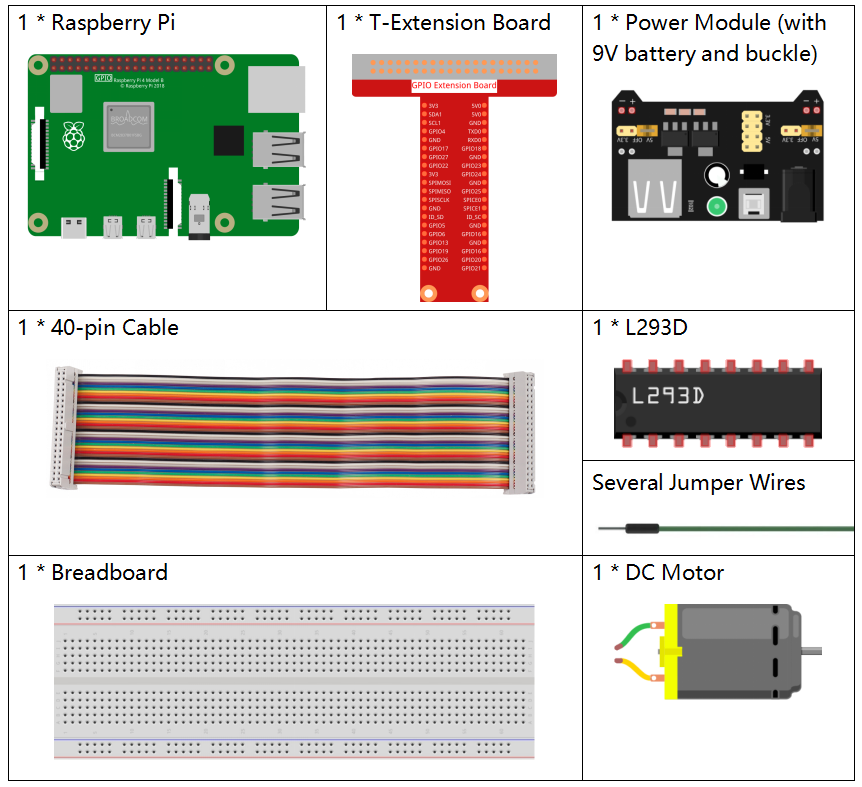
Componenti
Principio
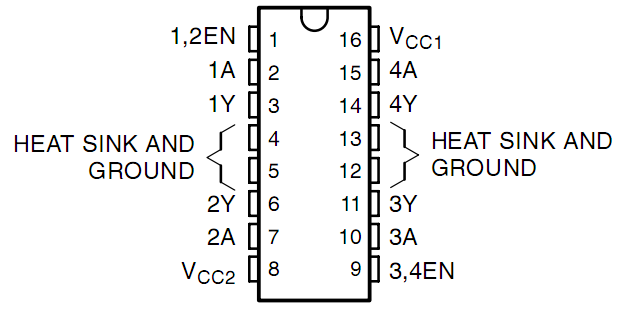
L293D
L’L293D è un driver motore a 4 canali integrato in un chip ad alta tensione e corrente. È progettato per collegarsi a livelli logici standard DTL, TTL, e per azionare carichi induttivi (come relè, motori DC, motori passo-passo) e transistor per il controllo di potenza. I motori DC convertono l’energia elettrica in energia meccanica e sono ampiamente usati per il loro eccellente controllo della velocità.
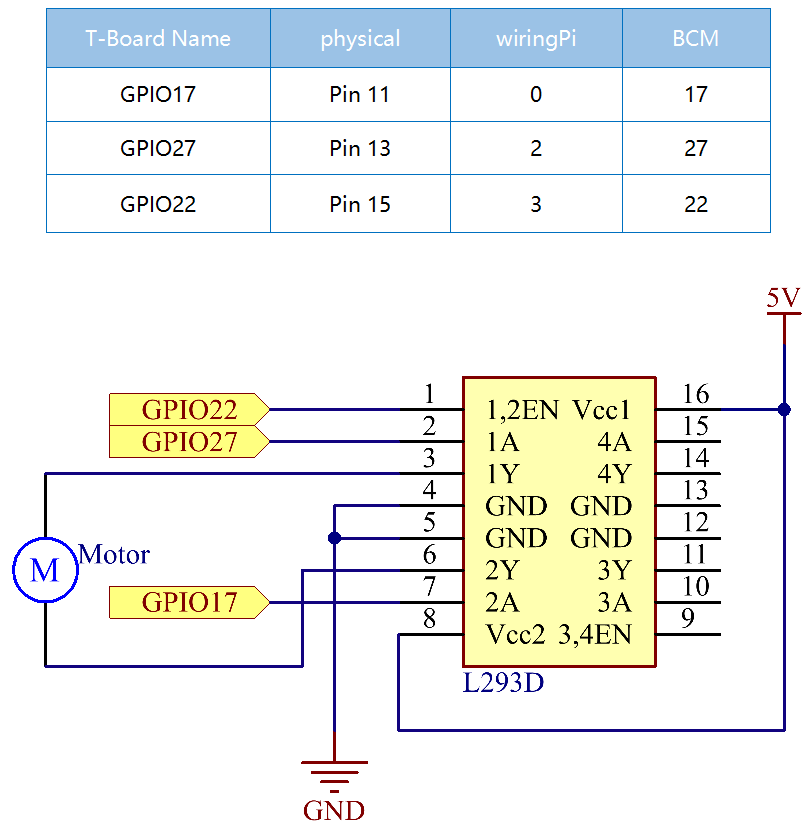
Guarda l’immagine dei pin di seguito. L’L293D ha due pin (Vcc1 e Vcc2) per l’alimentazione: Vcc2 alimenta il motore, mentre Vcc1 alimenta il chip. Dato che qui utilizziamo un motore DC di piccole dimensioni, collega entrambi i pin a +5V.
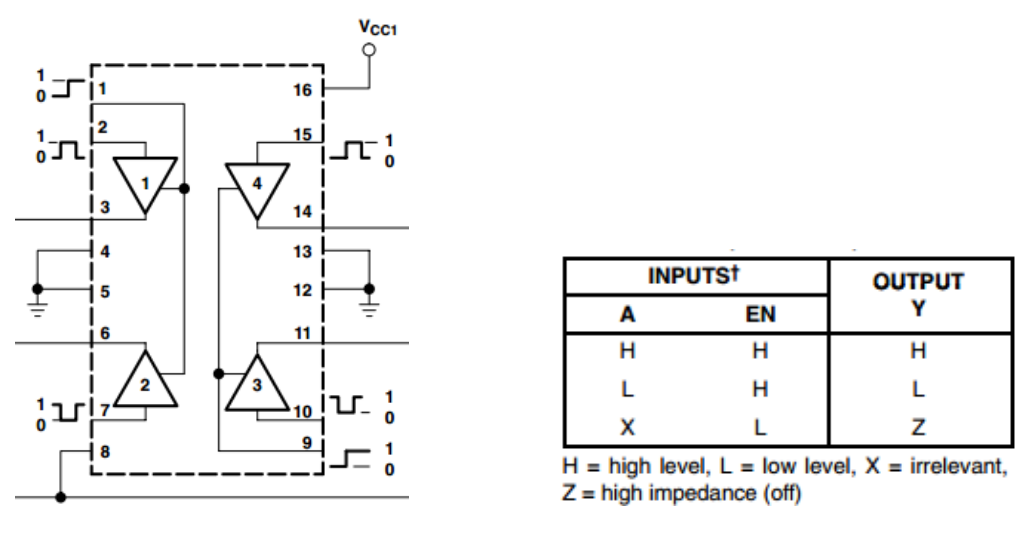
La figura seguente mostra la struttura interna dell’L293D. Il pin EN è un pin di abilitazione e funziona solo con livello alto; A rappresenta l’ingresso e Y l’uscita. La relazione tra essi è mostrata in basso a destra. Quando EN è alto, se A è alto, Y emette livello alto; se A è basso, Y emette livello basso. Quando EN è basso, l’L293D non funziona.
Motore DC

Questo è un motore DC a 5V. Ruota quando viene alimentato con una tensione tra i due terminali. Per comodità, puoi saldare i pin.

Modulo di Alimentazione
In questo esperimento, sono necessarie correnti elevate per alimentare il motore, soprattutto durante l’avvio e l’arresto, il che potrebbe interferire con il funzionamento del Raspberry Pi. Pertanto, alimentiamo separatamente il motore con questo modulo per garantire stabilità e sicurezza.
È sufficiente collegarlo alla breadboard per fornire alimentazione. Fornisce una tensione di 3,3V e 5V, e puoi selezionare l’opzione tramite un ponticello incluso.
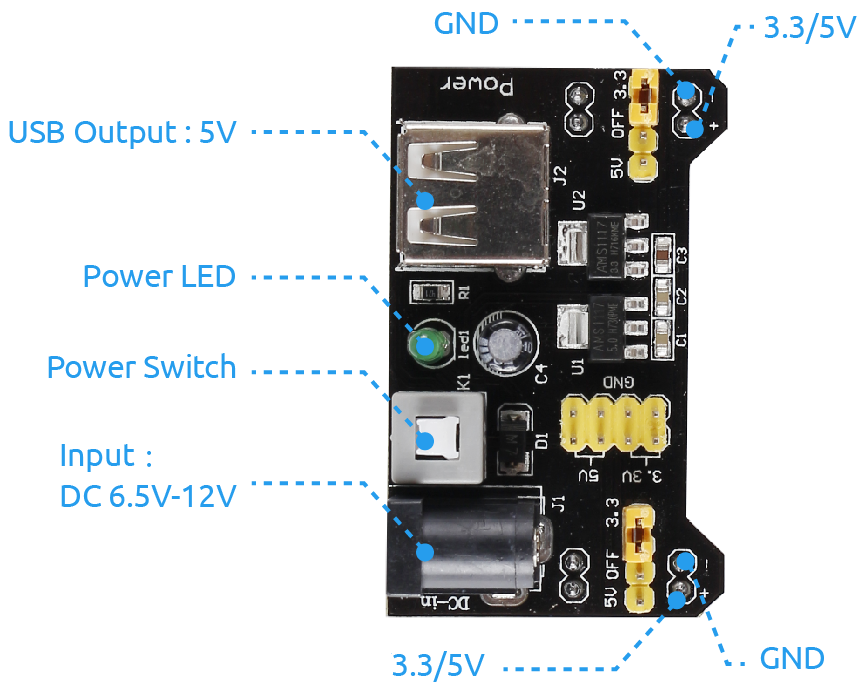
Diagramma Schematico
Collega il modulo di alimentazione alla breadboard e inserisci il ponticello sul pin da 5V, quindi erogherà una tensione di 5V. Collega il pin 1 dell’L293D a GPIO22, impostandolo su livello alto. Collega il pin2 a GPIO27 e il pin7 a GPIO17, impostando uno dei pin su alto e l’altro su basso. In questo modo puoi cambiare la direzione di rotazione del motore.
Procedure Sperimentali
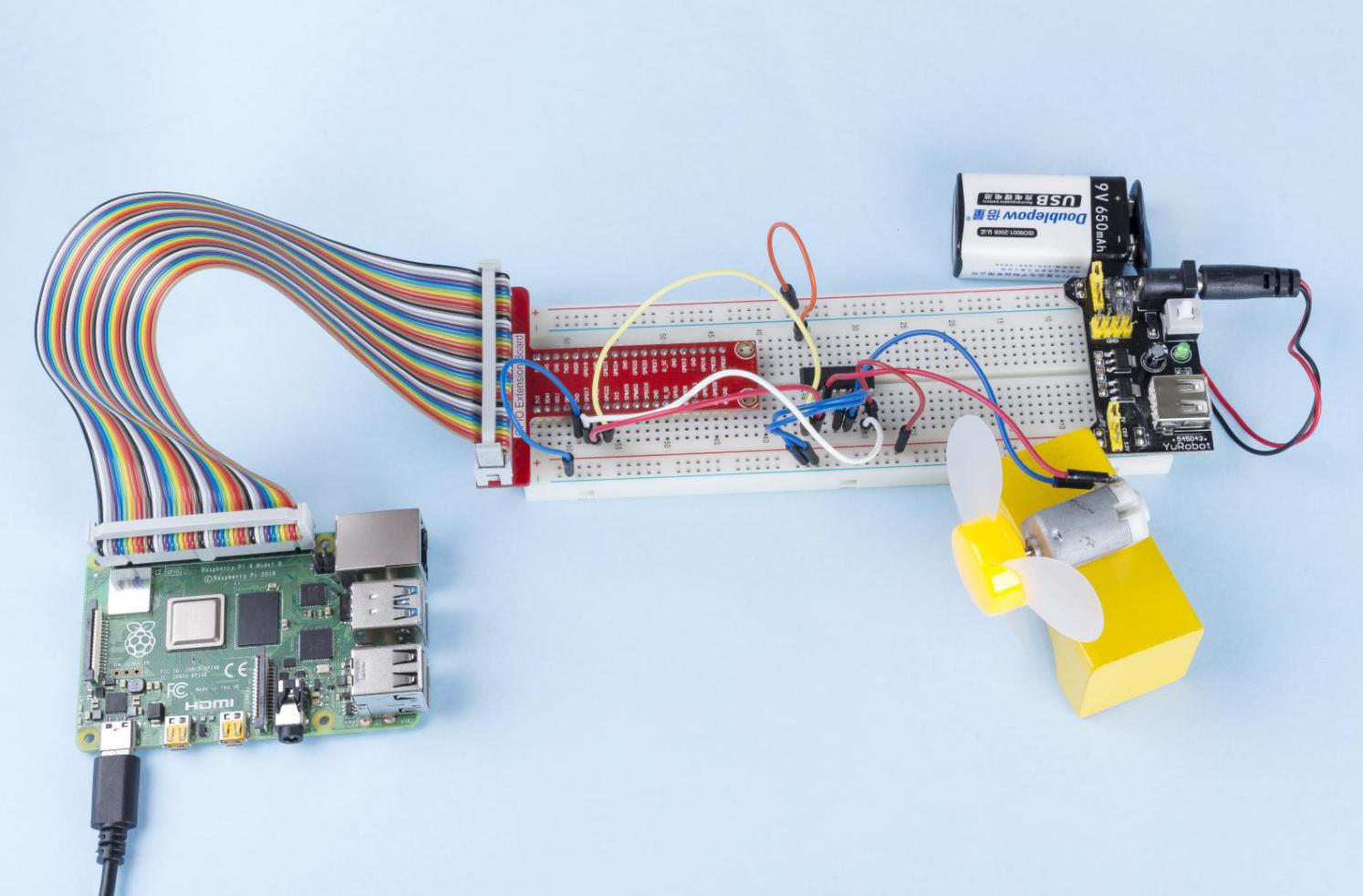
Passo 1: Costruisci il circuito.
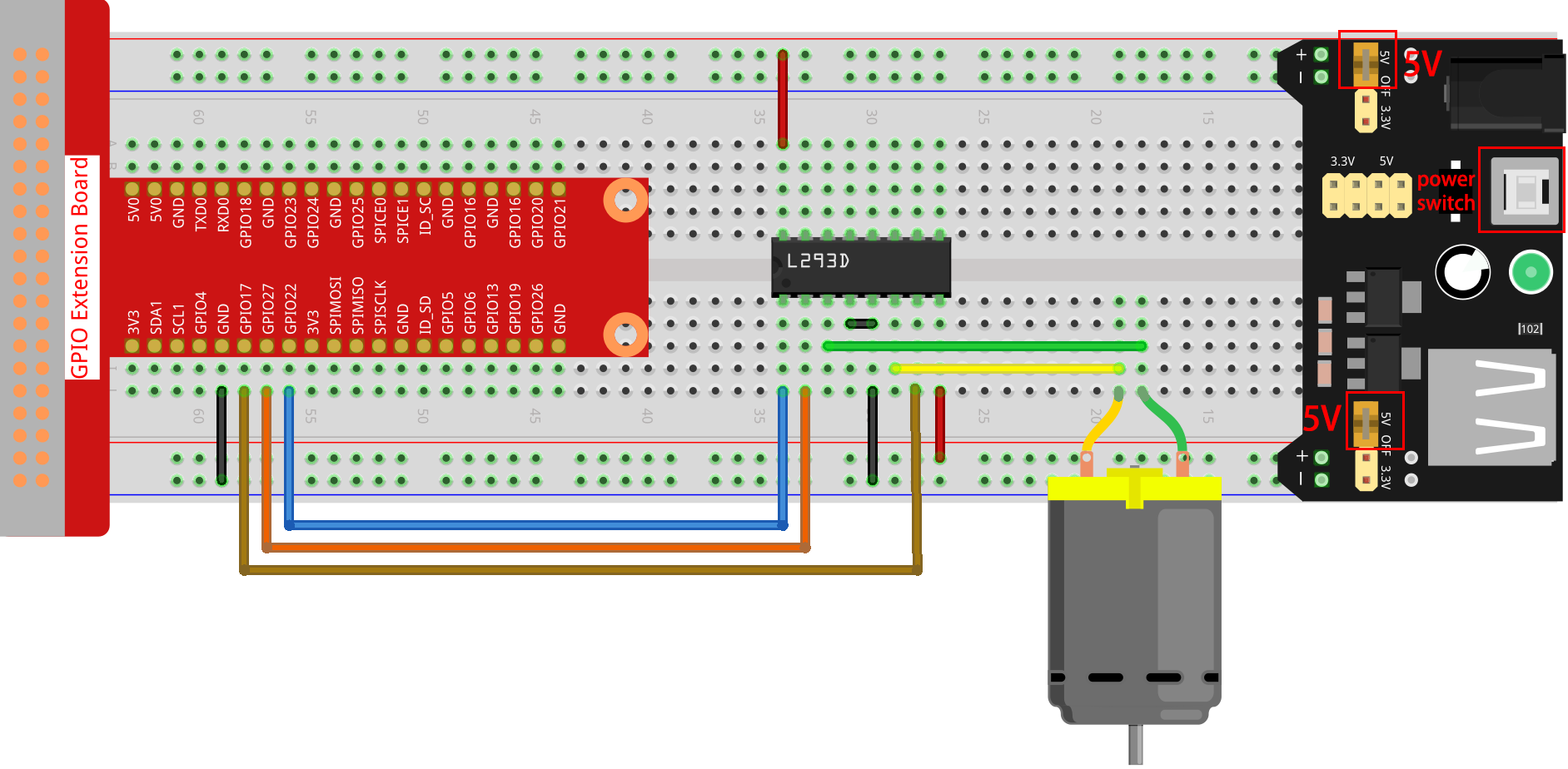
Nota
Il modulo di alimentazione può essere collegato a una batteria da 9V tramite il connettore 9V incluso nel kit. Inserisci il ponticello del modulo di alimentazione nella striscia da 5V della breadboard.

Per gli Utenti del Linguaggio C
Passo 2: Accedi alla cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/c/1.3.1/
Passo 3: Compila.
gcc 1.3.1_Motor.c -lwiringPi
Passo 4: Esegui il file eseguibile sopra.
sudo ./a.out
Quando il codice viene eseguito, il motore ruota prima in senso orario per 5s, quindi si ferma per 5s. Successivamente ruota in senso antiorario per 5s e si ferma di nuovo per 5s. Questa sequenza di azioni verrà eseguita ripetutamente.
Nota
Se il programma non funziona, o se appare l’errore: "wiringPi.h: No such file or directory", consulta Il codice C non funziona?.
Codice
#include <wiringPi.h>
#include <stdio.h>
#define MotorPin1 0
#define MotorPin2 2
#define MotorEnable 3
int main(void){
int i;
if(wiringPiSetup() == -1){ //in caso di errore di inizializzazione stampa il messaggio
printf("setup wiringPi failed !");
return 1;
}
pinMode(MotorPin1, OUTPUT);
pinMode(MotorPin2, OUTPUT);
pinMode(MotorEnable, OUTPUT);
while(1){
printf("Clockwise\n");
delay(100);
digitalWrite(MotorEnable, HIGH);
digitalWrite(MotorPin1, HIGH);
digitalWrite(MotorPin2, LOW);
for(i=0;i<3;i++){
delay(1000);
}
printf("Stop\n");
delay(100);
digitalWrite(MotorEnable, LOW);
for(i=0;i<3;i++){
delay(1000);
}
printf("Anti-clockwise\n");
delay(100);
digitalWrite(MotorEnable, HIGH);
digitalWrite(MotorPin1, LOW);
digitalWrite(MotorPin2, HIGH);
for(i=0;i<3;i++){
delay(1000);
}
printf("Stop\n");
delay(100);
digitalWrite(MotorEnable, LOW);
for(i=0;i<3;i++){
delay(1000);
}
}
return 0;
}
Spiegazione del Codice
digitalWrite(MotorEnable, HIGH);
Abilita l’L293D.
digitalWrite(MotorPin1, HIGH);
digitalWrite(MotorPin2, LOW);
Imposta un livello alto per 2A (pin 7); poiché 1,2EN (pin 1) è a livello alto, 2Y emetterà un livello alto.
Imposta un livello basso per 1A, così 1Y emetterà un livello basso e il motore inizierà a ruotare.
for(i=0;i<3;i++){
delay(1000);
}
Questo ciclo è un ritardo per 3*1000ms.
digitalWrite(MotorEnable, LOW)
Quando 1,2EN (pin1) è a livello basso, l’L293D non funziona. Il motore si ferma.
digitalWrite(MotorPin1, LOW)
digitalWrite(MotorPin2, HIGH)
Inverte la direzione della corrente nel motore, facendolo ruotare nel senso opposto.
Per Utenti del Linguaggio Python
Passo 2: Accedi alla cartella del codice.
cd ~/davinci-kit-for-raspberry-pi/python
Passo 3: Esegui.
sudo python3 1.3.1_Motor.py
Quando il codice viene eseguito, il motore ruota prima in senso orario per 5s, poi si ferma per 5s, successivamente ruota in senso antiorario per 5s, e si ferma di nuovo per 5s. Questa sequenza di azioni si ripete continuamente.
Codice
Nota
È possibile Modificare/Reimpostare/Copiare/Eseguire/Arrestare il codice qui sotto. Tuttavia, prima è necessario spostarsi nel percorso del codice sorgente, come davinci-kit-for-raspberry-pi/python.
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import time
# Imposta i pin
MotorPin1 = 17
MotorPin2 = 27
MotorEnable = 22
def setup():
# Imposta la numerazione GPIO in modalità BCM
GPIO.setmode(GPIO.BCM)
# Configura i pin come output
GPIO.setup(MotorPin1, GPIO.OUT)
GPIO.setup(MotorPin2, GPIO.OUT)
GPIO.setup(MotorEnable, GPIO.OUT, initial=GPIO.LOW)
# Definisce una funzione per controllare il motore
# direzione deve essere
# 1 (orario), 0 (fermo), -1 (antiorario)
def motor(direction):
# Rotazione in senso orario
if direction == 1:
# Imposta direzione
GPIO.output(MotorPin1, GPIO.HIGH)
GPIO.output(MotorPin2, GPIO.LOW)
# Abilita il motore
GPIO.output(MotorEnable, GPIO.HIGH)
print ("Clockwise")
# Rotazione in senso antiorario
if direction == -1:
# Imposta direzione
GPIO.output(MotorPin1, GPIO.LOW)
GPIO.output(MotorPin2, GPIO.HIGH)
# Abilita il motore
GPIO.output(MotorEnable, GPIO.HIGH)
print ("Counterclockwise")
# Stop
if direction == 0:
# Disabilita il motore
GPIO.output(MotorEnable, GPIO.LOW)
print ("Stop")
def main():
# Crea un dizionario per rendere lo script più leggibile
# CW per orario, CCW per antiorario, STOP per fermare
directions = {'CW': 1, 'CCW': -1, 'STOP': 0}
while True:
# Rotazione in senso orario
motor(directions['CW'])
time.sleep(5)
# Fermo
motor(directions['STOP'])
time.sleep(5)
# Rotazione in senso antiorario
motor(directions['CCW'])
time.sleep(5)
# Fermo
motor(directions['STOP'])
time.sleep(5)
def destroy():
# Ferma il motore
GPIO.output(MotorEnable, GPIO.LOW)
# Rilascia le risorse
GPIO.cleanup()
# Se si esegue direttamente questo script:
if __name__ == '__main__':
setup()
try:
main()
# Quando viene premuto 'Ctrl+C', il programma
# eseguirà destroy().
except KeyboardInterrupt:
destroy()
Spiegazione del Codice
def motor(direction):
# Rotazione oraria
if direction == 1:
# Imposta direzione
GPIO.output(MotorPin1, GPIO.HIGH)
GPIO.output(MotorPin2, GPIO.LOW)
# Abilita il motore
GPIO.output(MotorEnable, GPIO.HIGH)
print ("Clockwise")
...
Crea una funzione motor() il cui parametro è direzione. Quando la condizione direction=1 è soddisfatta, il motore ruota in senso orario; se direction=-1, ruota in senso antiorario; e quando direction=0, si ferma.
def main():
# Crea un dizionario per rendere lo script più leggibile
# CW per orario, CCW per antiorario, STOP per fermo
directions = {'CW': 1, 'CCW': -1, 'STOP': 0}
while True:
# Rotazione oraria
motor(directions['CW'])
time.sleep(5)
# Fermo
motor(directions['STOP'])
time.sleep(5)
# Rotazione antioraria
motor(directions['CCW'])
time.sleep(5)
# Fermo
motor(directions['STOP'])
time.sleep(5)
Nella funzione main(), crea un dizionario directions[], dove CW è uguale a 1, CCW è uguale a -1, e 0 si riferisce al comando Stop.
Quando il codice viene eseguito, il motore ruota inizialmente in senso orario per 5 secondi, poi si ferma per altri 5 secondi. Successivamente ruota in senso antiorario per 5 secondi, e infine si ferma di nuovo per 5 secondi. Questa sequenza di azioni si ripeterà.
Ora dovresti vedere le pale del motore ruotare.
Immagine del Fenomeno