Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
3.1.6 Bewegungssteuerung
Einführung
In dieser Lektion werden wir ein einfaches Bewegungserfassungs- und Steuergerät herstellen. Die MPU6050 wird als Sensor und der Schrittmotor als gesteuertes Gerät verwendet. Mit der am Handschuh montierten MPU6050 können Sie den Schrittmotor durch Drehen Ihres Handgelenks steuern.
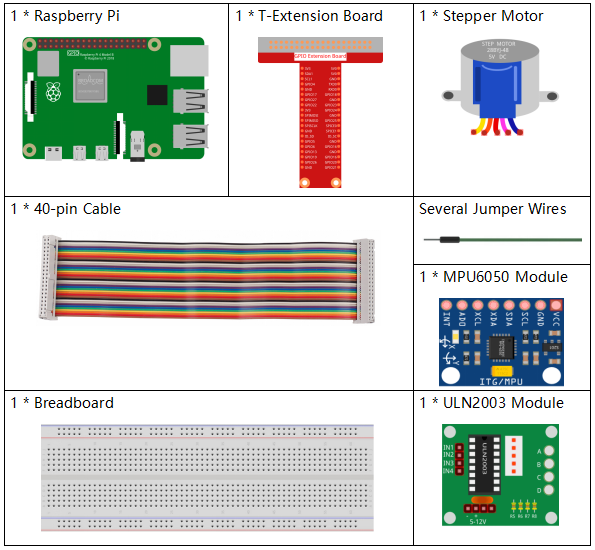
Komponenten
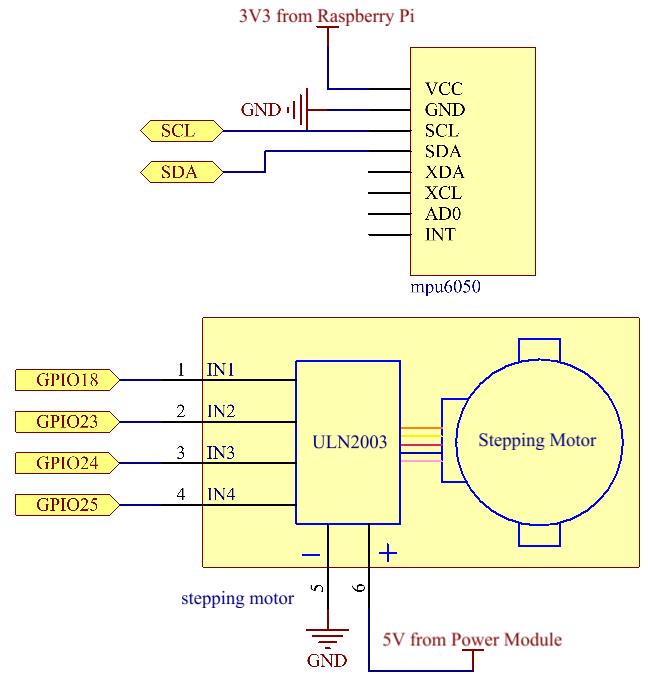
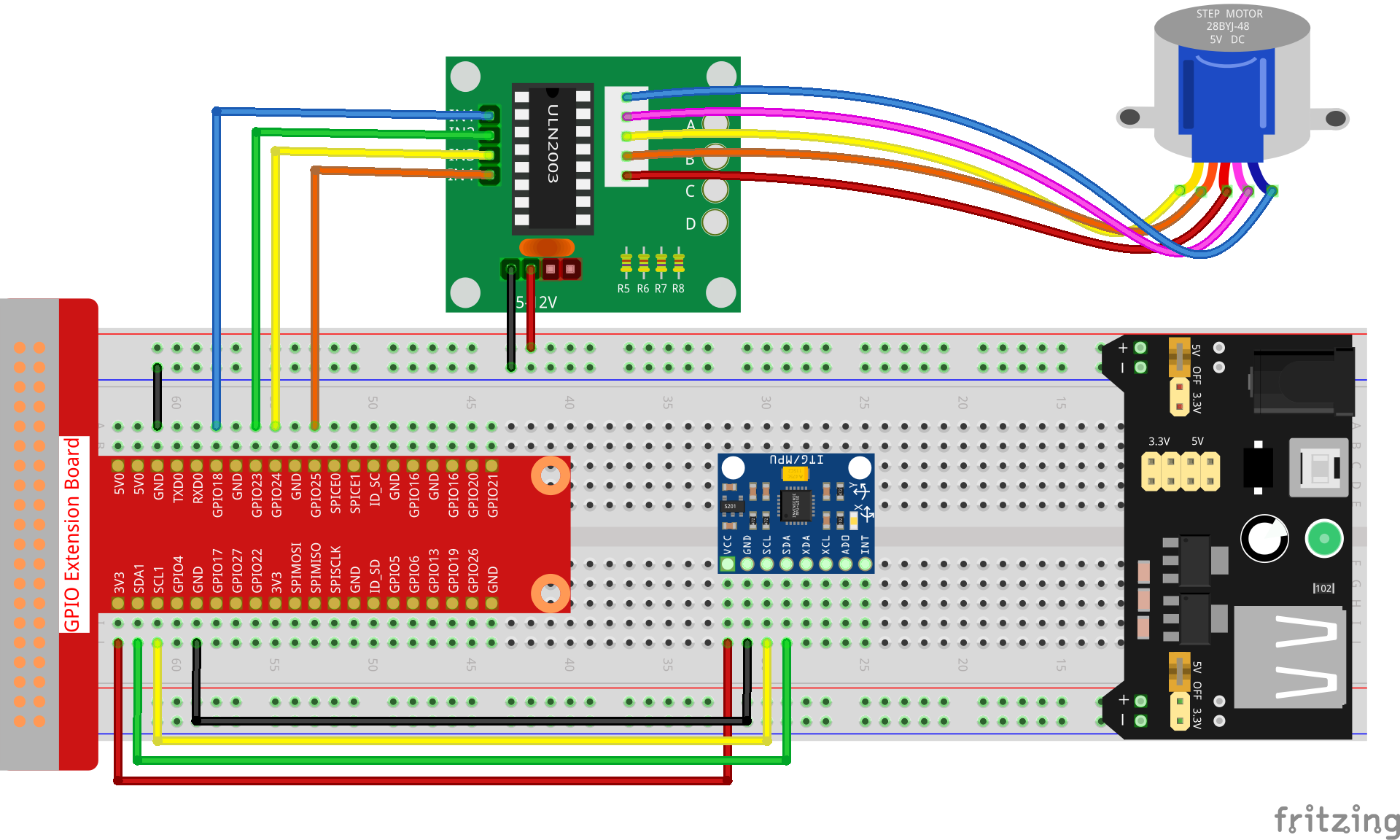
Schematische Darstellung
T-Karte Name |
physisch |
wiringPi |
BCM |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO23 |
Pin 16 |
4 |
23 |
GPIO24 |
Pin 18 |
5 |
24 |
GPIO25 |
Pin 22 |
6 |
25 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
Experimentelle Verfahren
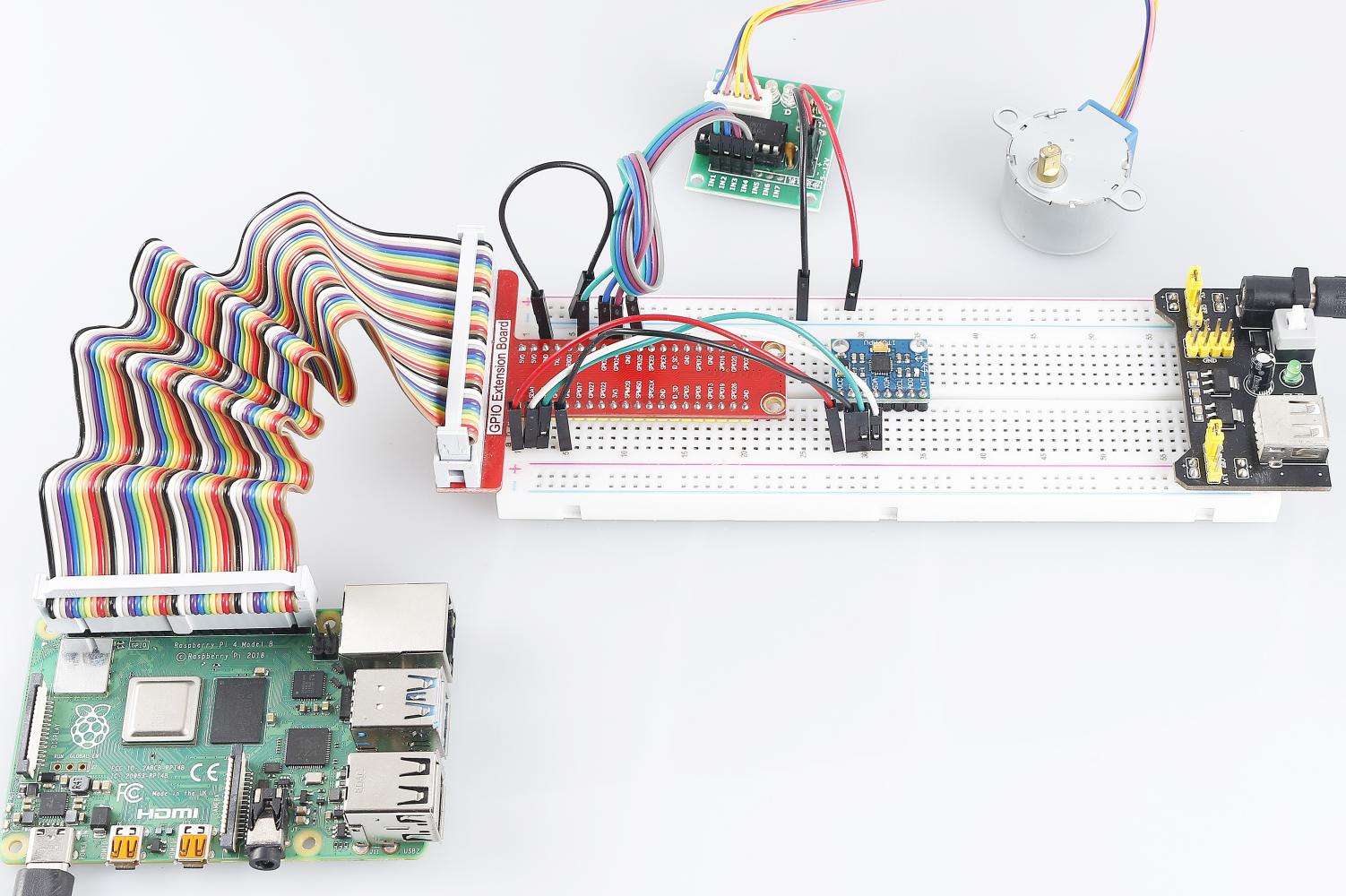
Schritt 1: Bauen Sie die Schaltung auf.
Für Benutzer in C-Sprache
Schritt 2: Gehen Sie zum Ordner der Kode.
cd ~/davinci-kit-for-raspberry-pi/c/3.1.6/
Schritt 3: Kompilieren Sie die Kode.
gcc 3.1.6_MotionControl.c -lwiringPi -lm
Schritt 4: Führen Sie die ausführbare Datei aus.
sudo ./a.out
Wenn der Neigungswinkel von mpu6050 auf der Y-Achse größer als 45 ℃, ist, dreht sich der Schrittmotor während der Kode gegen den Uhrzeigersinn. Bei weniger als -45 ℃, dreht sich der Schrittmotor im Uhrzeigersinn.
Code Erklärung
double mpu6050(){
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
double angle=get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled);
return angle;
}
mpu6050 erhält den Neigungswinkel in Richtung der Y-Achse.
void rotary(char direction){
if(direction == 'c'){
for(int j=0;j<4;j++){
for(int i=0;i<4;i++)
{digitalWrite(motorPin[i],0x99>>j & (0x08>>i));}
delayMicroseconds(stepSpeed);
}
}
else if(direction =='a'){
for(int j=0;j<4;j++){
for(int i=0;i<4;i++)
{digitalWrite(motorPin[i],0x99<<j & (0x80>>i));}
delayMicroseconds(stepSpeed);
}
}
}
Wenn die empfangene Richtung Taste ‚c‘ ist, dreht sich der Schrittmotor im Uhrzeigersinn; wenn die Taste ‚a‘ ist, dreht der Motor gegen den Uhrzeigersinn. Siehe 1.3.3 Schrittmotor für weitere Details zur Berechnung der Drehrichtung des Schrittmotors.
int main()
{
setup();
double angle;
while(1) {
angle = mpu6050();
if (angle >=45){rotary('a');}
else if (angle<=-45){rotary('c');}
}
return 0;
}
Der Neigungswinkel in Richtung der Y-Achse wird von mpu6050 abgelesen. Wenn er größer als 45 ℃, ist, dreht sich der Schrittmotor gegen den Uhrzeigersinn. Bei weniger als -45 ℃, dreht sich der Schrittmotor im Uhrzeigersinn.
Für Python-Sprachbenutzer
Schritt 2: Gehen Sie zum Ordner der Kode.
cd ~/davinci-kit-for-raspberry-pi/python/
Schritt 3: Führen Sie die ausführbare Datei aus.
sudo python3 3.1.6_MotionControl.py
Wenn der Neigungswinkel von mpu6050 auf der Y-Achse größer als 45 ℃, ist, dreht sich der Schrittmotor während der Kode gegen den Uhrzeigersinn. Bei weniger als -45 ℃, dreht sich der Schrittmotor im Uhrzeigersinn.
Code
Bemerkung
Sie können den folgenden Code Ändern/Zurücksetzen/Kopieren/Ausführen/Stoppen . Zuvor müssen Sie jedoch zu einem Quellcodepfad wie davinci-kit-for-raspberry-pi/python gehen.
import RPi.GPIO as GPIO
import smbus
import math
import time
# Power management registers
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
bus = smbus.SMBus(1)
address = 0x68
bus.write_byte_data(address, power_mgmt_1, 0)
#Stepper motor pins
motorPin = (18,23,24,25)
rolePerMinute =15
stepsPerRevolution = 2048
stepSpeed = (60/rolePerMinute)/stepsPerRevolution
#mpu6050
def read_byte(adr):
return bus.read_byte_data(address, adr)
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr+1)
val = (high << 8) + low
return val
def read_word_2c(adr):
val = read_word(adr)
if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
def dist(a,b):
return math.sqrt((a*a)+(b*b))
def get_y_rotation(x,y,z):
radians = math.atan2(x, dist(y,z))
return -math.degrees(radians)
def get_x_rotation(x,y,z):
radians = math.atan2(y, dist(x,z))
return math.degrees(radians)
def mpu6050():
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
angle=get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
return angle
#Stepper Motor
def rotary(direction):
if(direction == 'c'):
for j in range(4):
for i in range(4):
GPIO.output(motorPin[i],0x99>>j & (0x08>>i))
time.sleep(stepSpeed)
elif(direction == 'a'):
for j in range(4):
for i in range(4):
GPIO.output(motorPin[i],0x99<<j & (0x80>>i))
time.sleep(stepSpeed)
def setup():
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
for i in motorPin:
GPIO.setup(i, GPIO.OUT)
def loop():
while True:
angle=mpu6050()
if angle >=45 :
rotary('a')
elif angle <=-45:
rotary('c')
def destroy():
GPIO.cleanup()
if __name__ == '__main__':
setup()
try:
loop()
except KeyboardInterrupt:
destroy()
Code Erklärung
def mpu6050():
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
angle=get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
return angle
mpu6050 erhält den Neigungswinkel in Richtung der Y-Achse.
def rotary(direction):
if(direction == 'c'):
for j in range(4):
for i in range(4):
GPIO.output(motorPin[i],0x99>>j & (0x08>>i))
time.sleep(stepSpeed)
elif(direction == 'a'):
for j in range(4):
for i in range(4):
GPIO.output(motorPin[i],0x99<<j & (0x80>>i))
time.sleep(stepSpeed)
Wenn die empfangene Richtung Taste ‚c‘ ist, dreht sich der Schrittmotor im Uhrzeigersinn; wenn die Taste ‚a‘ ist, dreht der Motor gegen den Uhrzeigersinn. Siehe 1.3.3 Schrittmotor für weitere Details zur Berechnung der Drehrichtung des Schrittmotors.
def loop():
while True:
angle=mpu6050()
if angle >=45 :
rotary('a')
elif angle <=-45:
rotary('c')
Der Neigungswinkel in Richtung der Y-Achse wird aus mpu6050 abgelesen.
Wenn er größer als 45 ℃, ist, wird rotary() aufgerufen, damit sich der Schrittmotor gegen den Uhrzeigersinn dreht. Bei weniger als -45 ℃, dreht sich der Schrittmotor im Uhrzeigersinn.
Phänomen Bild