9. リモートコントロール¶
このキットには、IRレシーバーが含まれているので、IRリモートコントロールを使用して車の動きをコントロールすることができます。
必要な部品
このプロジェクトには、以下のコンポーネントが必要です。
キット全体を購入するのが便利です。リンクはこちら:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
3 in 1 Starter Kit |
380+ |
以下のリンクからそれぞれのアイテムを購入することもできます。
コンポーネント紹介 |
購入リンク |
|---|---|
- |
|
- |
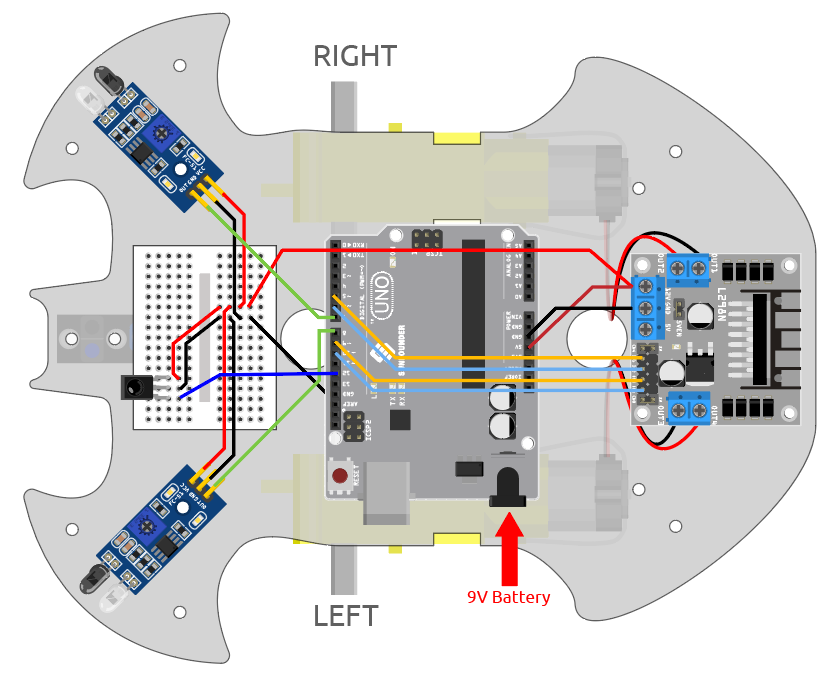
配線図
以下の図に従って回路を組み立ててください。
IR レシーバー |
R3 ボード |
|---|---|
OUT |
12 |
GND |
GND |
VCC |
5V |
LED |
R3 ボード |
|---|---|
アノード(長いピン) |
13 |
カソード |
GND |
コード
注釈
3in1-kit\car_project\9.remote_controlのパスにある9.remote_control.inoファイルを開きます。または、このコードを Arduino IDE にコピーします。
ここでは
IRremoteライブラリが使用されています。 Library Manager からインストールできます。
コードのアップロードが成功したら、リモートコントロールのボタンを押すと、LEDが一回点滅して信号が受信されたことを示し、ボタンの指示に従って車が動きます。以下のキーを押して車を操作することができます。
+:加速
-:減速
1:左前方へ進む
2:前進
3:右前方へ進む
4:左折
6:右折
7:左後方へ後退
8:後退
9:右後方へ後退
どのように動作するのか?
このプロジェクトの効果は、IRリモートコントロールのキー値を読み取り、車を動かすことです。さらに、ピン13のLEDが点滅して、赤外線信号の受信が成功したことを示します。
IRremoteライブラリをインポートします。 Library Manager からインストールできます。#include <IRremote.h> const int IR_RECEIVE_PIN = 12; // IRセンサのピン番号を定義する
ボーレート9600でシリアル通信を初期化します。指定されたピン(
IR_RECEIVE_PIN)でIRレシーバを初期化し、LEDフィードバックを有効にします(該当する場合)。... void setup() { ... //IR リモート IrReceiver.begin(IR_RECEIVE_PIN, ENABLE_LED_FEEDBACK); // IRレシーバを開始する Serial.println("REMOTE CONTROL START"); }
リモートコントロールのキーを押すと、赤外線受信機はどのキーが押されたかを知り、車は対応するキー値に従って動きます。
void loop() { if (IrReceiver.decode()) { // Serial.println(results.value,HEX); String key = decodeKeyValue(IrReceiver.decodedIRData.command); if (key != "ERROR") { Serial.println(key); if (key == "+") { speed += 50; } else if (key == "-") { speed -= 50; } else if (key == "2") { moveForward(speed); delay(1000); ... } IrReceiver.resume(); // 次の値の受信を有効にする } }
IR信号が受信され、正常にデコードされたかどうかを確認する。
IRコマンドをデコードし、カスタム
decodeKeyValue()関数を使用してkeyに保存する。デコードされた値がエラーでないかを確認します。
デコードされたIR値をシリアルモニタに表示する。
次の信号のIR信号受信を再開する。