注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
1. 移動¶

プログラミングを始める前に、L9110モジュールの動作原理を再確認しましょう。
こちらはモーターBの真理表です:
B-1A |
B-1B(B-2A) |
モーターBの状態 |
|---|---|---|
1 |
0 |
時計回りに回転 |
0 |
1 |
反時計回りに回転 |
0 |
0 |
ブレーキ |
1 |
1 |
停止 |
こちらはモーターAの真理表です:
A-1A |
A-1B |
モーターAの状態 |
|---|---|---|
1 |
0 |
時計回りに回転 |
0 |
1 |
反時計回りに回転 |
0 |
0 |
ブレーキ |
1 |
1 |
停止 |
前進
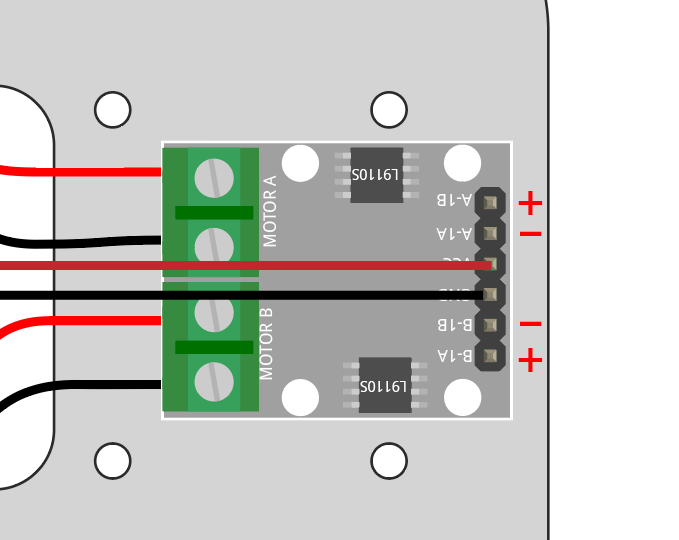
L9110モジュールの入力を12VおよびGNDに直接接続して、車を動かしてみましょう。
R3ボード、L9110モジュール、および2つのモーターを接続します。

B-1B(B-2A)とA-1AをVCCに、B-1AとA-1BをGNDに接続すると、車が前進するのを見ることができます。

両方のモーターが同時に前進しない場合、以下の状況が発生した場合は、2つのモーターの配線を再調整する必要があります。
両方のモーターが同時に後退する場合(左モーターが時計回り、右モーターが反時計回りに回転する場合)、左右のモーターの配線を同時に交換します。OA(A)とOB(A)、OA(B)とOB(B)を交換します。
左モーターが後退する場合(時計回りに回転)、左モーターのOA(B)とOB(B)の配線を交換します。
右モーターが後退する場合(反時計回りに回転)、右モーターのOA(A)とOB(A)の配線を交換します。
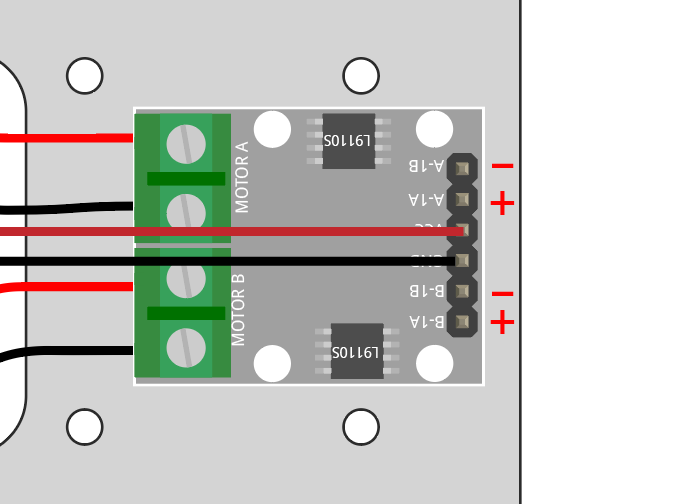
後退
B-1B(B-2A)およびA-1AをGNDに、B-1AおよびA-1BをVCCに接続すると、車が後退するのを見ることができます。
左折
車を左に曲げたい場合、つまり、両方のモーターを時計回りに回転させたい場合は、B-1AおよびA-1AをGNDに、B-1B(B-2A)およびA-1BをVCCに接続する必要があります。

右折
逆に、車を右に曲げたい場合、つまり、両方のモーターを反時計回りに回転させたい場合は、B-1AおよびA-1AをVCCに、B-1B(B-2A)およびA-1BをGNDに接続する必要があります。
停止
モーターを停止するには、同じ側の入力を同時に12VまたはGNDに接続します。たとえば、B-1AおよびB-1B(B-2A)を同時に12Vまたは5Vに接続し、A-1AとA-1Bも同様にします。
これはもちろん理論的であり、コードで制御するときに後で必要となります。ここでは、車の電源を取り外して停止させることができます。