Nota
Ciao, benvenuto nella SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra comunità e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e anteprime speciali.
Sconti esclusivi: Approfitta di sconti riservati sui nostri prodotti più recenti.
Promozioni festive e concorsi: Partecipa a concorsi e promozioni durante le festività.
👉 Sei pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
2.2.6 Modulo Sensore di Velocità
Introduzione
In questo progetto, impareremo l’uso del modulo sensore di velocità. Un modulo sensore di velocità è un tipo di tachimetro che viene utilizzato per misurare la velocità di un oggetto rotante, come un motore.
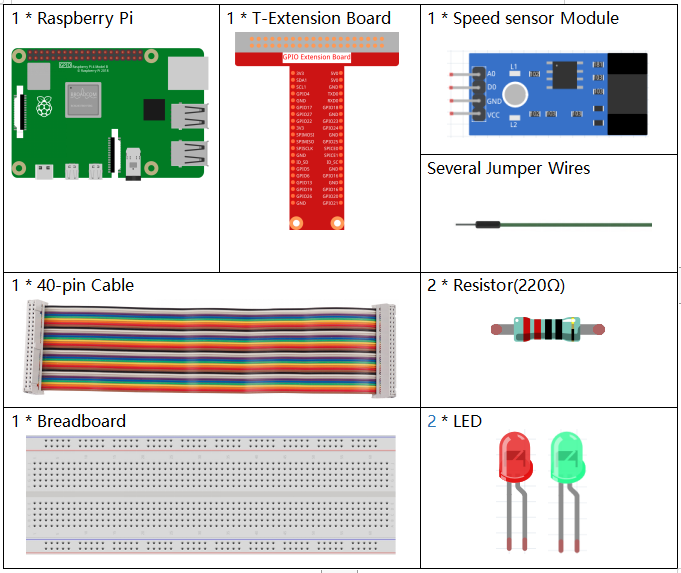
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente comodo acquistare un kit completo, ecco il link:
Nome |
ARTICOLI IN QUESTO KIT |
LINK |
|---|---|---|
Kit Raphael |
337 |
Puoi anche acquistarli separatamente dai link qui sotto.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
- |
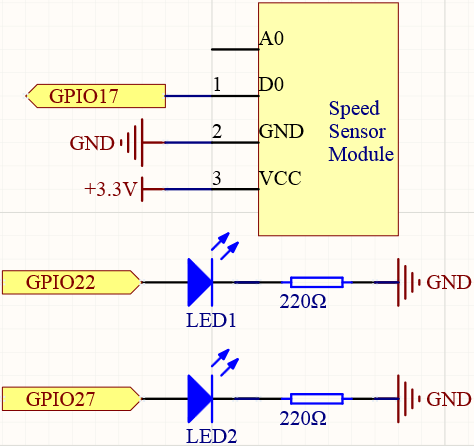
Schema Elettrico
Procedure Sperimentali
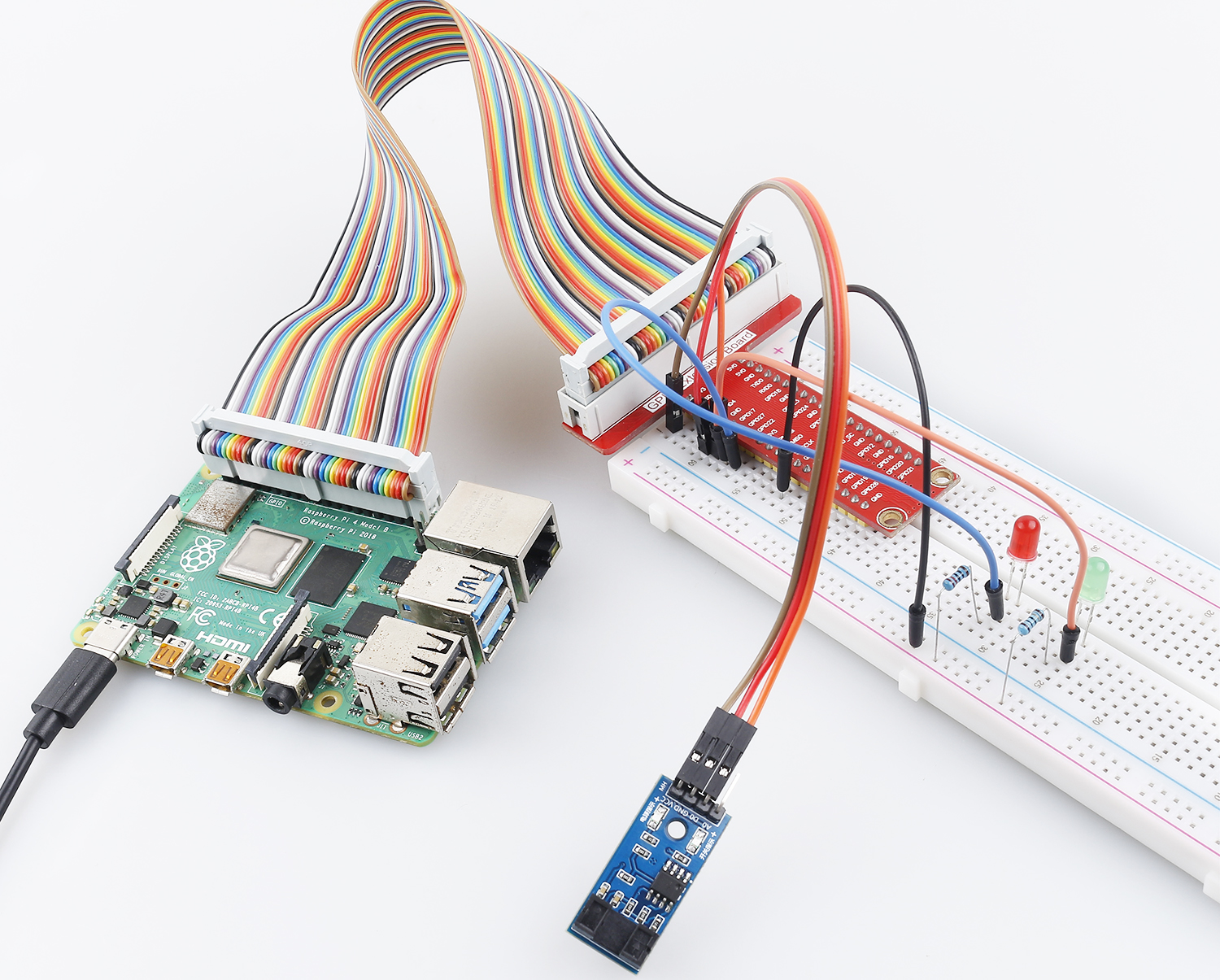
Passo 1: Costruisci il circuito.

Passo 2: Cambia directory.
cd ~/raphael-kit/python
Passo 3: Esegui.
sudo python3 2.2.6_speed_sensor_module.py
Dopo che il codice è stato eseguito, il LED verde si accenderà. Se metti un ostacolo nella fessura del modulo sensore di velocità, verrà stampato sullo schermo «light blocked» e il LED rosso si accenderà. Rimuovi l’ostacolo e il LED verde si accenderà di nuovo.
Codice
Nota
Puoi Modificare/Reimpostare/Copiare/Eseguire/Interrompere il codice qui sotto. Ma prima devi accedere al percorso del codice come raphael-kit/python. Dopo aver modificato il codice, puoi eseguirlo direttamente per vedere l’effetto.
#!/usr/bin/env python3
import RPi.GPIO as GPIO
speedPin = 17
Gpin = 27
Rpin = 22
def setup():
GPIO.setmode(GPIO.BCM) #
GPIO.setup(Gpin, GPIO.OUT) # Imposta Gpin in modalità output
GPIO.setup(Rpin, GPIO.OUT) # Imposta Rpin in modalità output
GPIO.setup(speedPin, GPIO.IN, pull_up_down=GPIO.PUD_UP) # Imposta speedPin in modalità input e inizializzalo a livello alto (3.3V)
GPIO.add_event_detect(speedPin, GPIO.BOTH, callback=detect, bouncetime=200)
def Led(x):
if x == 0:
GPIO.output(Rpin, 0)
GPIO.output(Gpin, 1)
if x == 1:
GPIO.output(Rpin, 1)
GPIO.output(Gpin, 0)
print ('Light was blocked')
def detect(chn):
Led(GPIO.input(speedPin))
def loop():
while True:
pass
def destroy():
GPIO.output(Gpin, GPIO.LOW) # Spegni il LED verde
GPIO.output(Rpin, GPIO.LOW) # Spegni il LED rosso
GPIO.cleanup() # Rilascia le risorse
if __name__ == '__main__': # Il programma parte da qui
setup()
try:
loop()
except KeyboardInterrupt: # Quando viene premuto 'Ctrl+C', il programma distrugge() sarà eseguito.
destroy()
Spiegazione del Codice
GPIO.add_event_detect(speedPin, GPIO.BOTH, callback=detect, bouncetime=200)
Aggiungi un evento qui, che viene attivato da una variazione del livello di speedPin e chiama detect() per controllare l’accensione e lo spegnimento dei 2 LED.
def Led(x):
if x == 0:
GPIO.output(Rpin, 0)
GPIO.output(Gpin, 1)
if x == 1:
GPIO.output(Rpin, 1)
GPIO.output(Gpin, 0)
print ('Light was blocked')
Definisci una funzione Led() che accende il LED rosso e stampa Light was blocked quando il parametro è 1; accende il LED verde quando il parametro è 0.
def detect(chn):
Led(GPIO.input(speedPin))
Definisci una funzione di callback dove il valore di speedPin controllerà l’accensione o lo spegnimento dei 2 LED.
Immagine del Fenomeno