Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
1.3.1 Moteur
Introduction
Dans ce projet, nous allons apprendre à utiliser le L293D pour piloter un moteur à courant continu (CC) et le faire tourner dans le sens horaire et antihoraire. Comme le moteur CC nécessite un courant plus important, pour des raisons de sécurité, nous utilisons ici le module d’alimentation pour alimenter les moteurs.
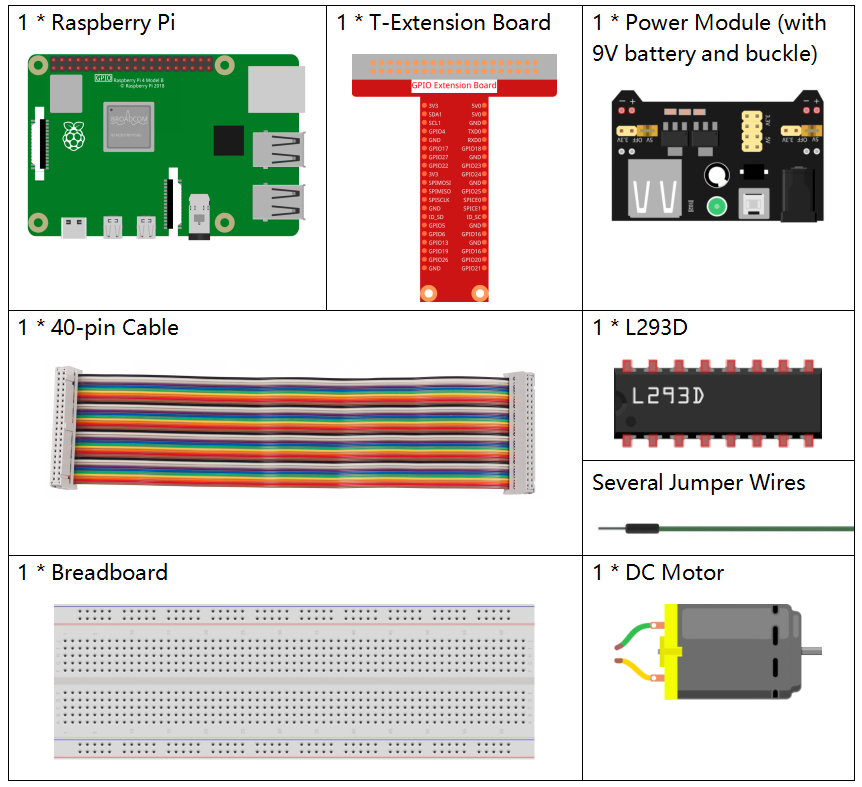
Composants nécessaires
Dans ce projet, nous avons besoin des composants suivants.
Il est certainement pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément via les liens ci-dessous.
INTRODUCTION DES COMPOSANTS |
LIEN D’ACHAT |
|---|---|
- |
|
- |
|
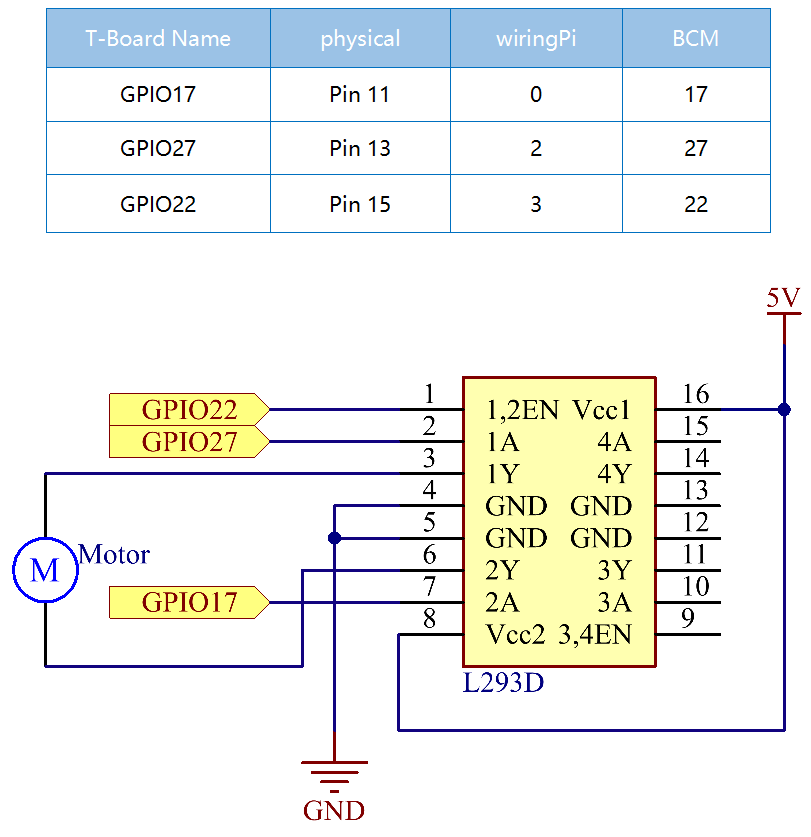
Schéma de câblage
Procédures expérimentales
Étape 1: Construisez le circuit.
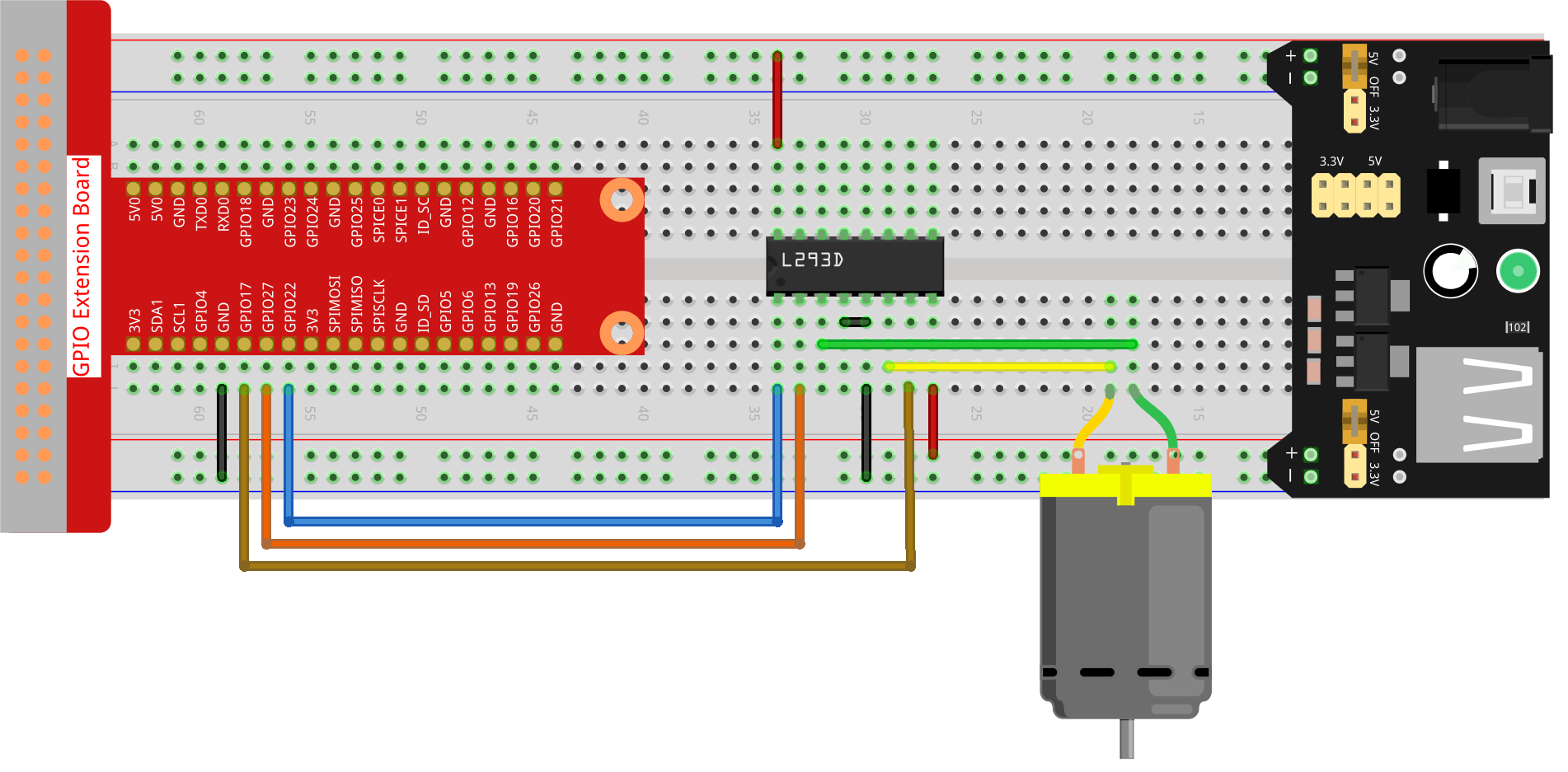
Note
Le module d’alimentation peut utiliser une batterie 9V avec la boucle de batterie 9V dans le kit. Insérez le capuchon du cavalier du module d’alimentation dans les bandes de bus 5V de la breadboard.

Étape 2: Accédez au dossier du code.
cd ~/raphael-kit/python-pi5
Étape 3: Exécutez.
sudo python3 1.3.1_Motor_zero.py
Lorsque le code s’exécute, le moteur tourne d’abord dans le sens horaire pendant 5 secondes, puis s’arrête pendant 5 secondes. Ensuite, il tourne dans le sens antihoraire pendant 5 secondes; par la suite, le moteur s’arrête pendant 5 secondes. Cette série d’actions sera exécutée de manière répétée.
Avertissement
Si vous recevez le message d’erreur RuntimeError: Cannot determine SOC peripheral base address, veuillez consulter Si « gpiozero » ne fonctionne pas.
Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci-dessous. Mais avant cela, vous devez aller au chemin du code source comme raphael-kit/python-pi5. Après avoir modifié le code, vous pouvez l’exécuter directement pour voir l’effet.
#!/usr/bin/env python3
from gpiozero import Motor
from time import sleep
# Initialize the Motor with GPIO Zero, specifying GPIO pins for forward (17), backward (27), and enable (22) control
motor = Motor(forward=17, backward=27, enable=22)
try:
# Main function to control the motor's direction and movement.
# Alternates motor rotation between clockwise and counterclockwise with stops in between.
actions = {'CW': motor.forward, 'CCW': motor.backward, 'STOP': motor.stop} # Define motor actions for readability
while True:
# Loop through the defined actions to control motor direction
for action in ['CW', 'STOP', 'CCW', 'STOP']:
actions[action]() # Execute the current action (forward, stop, backward, stop)
print(f"{action}") # Display the current action in the console
sleep(5) # Pause for 5 seconds before proceeding to the next action
except KeyboardInterrupt:
# Gracefully handle a keyboard interrupt (e.g., Ctrl+C) to stop the program
pass
Explication du code
Ces instructions d’importation intègrent la classe
Motorde la bibliothèquegpiozeroet la fonctionsleepdu moduletime.#!/usr/bin/env python3 from gpiozero import Motor from time import sleep
Cette ligne initialise un objet
Motor, en spécifiant les broches GPIO pour le contrôle avant (17), arrière (27) et l’activation (22).# Initialize the Motor with GPIO Zero, specifying GPIO pins for forward (17), backward (27), and enable (22) control motor = Motor(forward=17, backward=27, enable=22)
Les actions pour le contrôle du moteur sont définies dans un dictionnaire pour plus de lisibilité. Une boucle infinie (while True) parcourt ces actions, exécutant chacune pendant 5 secondes.
try: # Main function to control the motor's direction and movement. # Alternates motor rotation between clockwise and counterclockwise with stops in between. actions = {'CW': motor.forward, 'CCW': motor.backward, 'STOP': motor.stop} # Define motor actions for readability while True: # Loop through the defined actions to control motor direction for action in ['CW', 'STOP', 'CCW', 'STOP']: actions[action]() # Execute the current action (forward, stop, backward, stop) print(f"{action}") # Display the current action in the console sleep(5) # Pause for 5 seconds before proceeding to the next action
Ce segment permet au programme d’être terminé en toute sécurité en utilisant une interruption clavier (Ctrl+C) sans causer d’erreurs.
except KeyboardInterrupt: # Gracefully handle a keyboard interrupt (e.g., Ctrl+C) to stop the program pass