Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
1.3.2 Servo
Introduction
Dans ce projet, nous allons apprendre à faire tourner un servo.
Required Components
Dans ce projet, nous avons besoin des composants suivants.
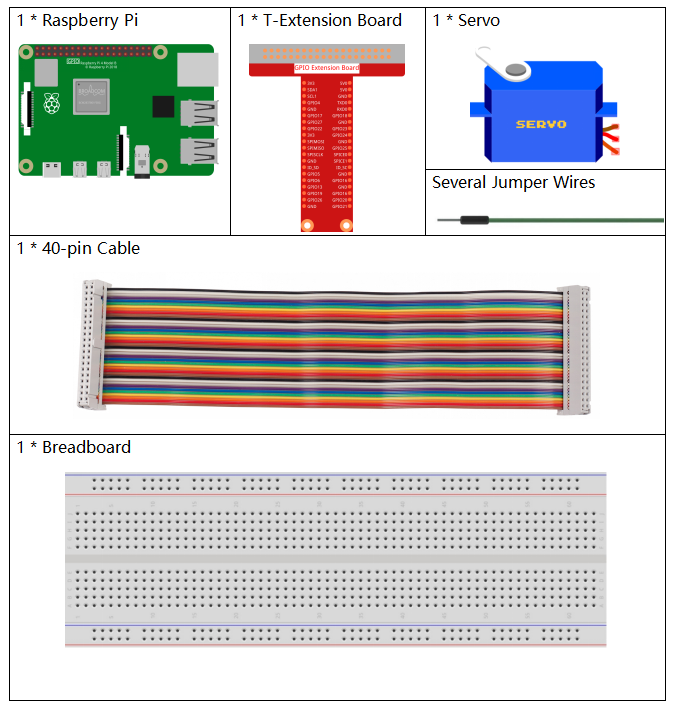
Il est très pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément à partir des liens ci-dessous.
INTRODUCTION DES COMPOSANTS |
LIEN D’ACHAT |
|---|---|
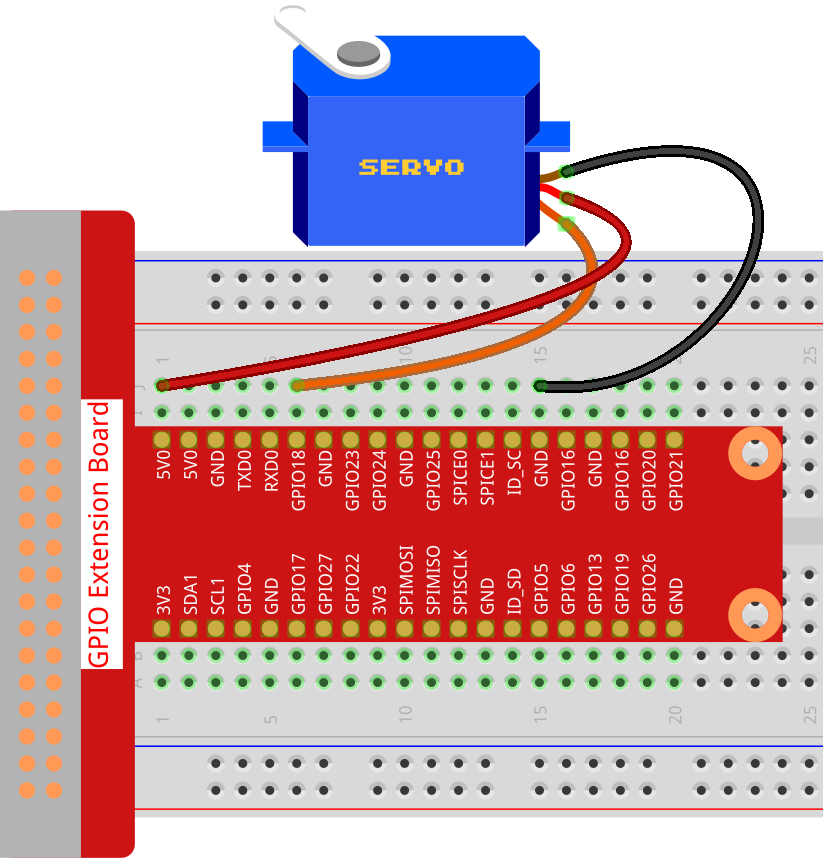
Schematic Diagram

Experimental Procedures
Étape 1 : Construisez le circuit.
Étape 2 : Accédez au dossier du code.
cd ~/raphael-kit/python-pi5
Étape 3 : Exécutez le fichier exécutable.
sudo python3 1.3.2_Servo_zero.py
Après l’exécution du programme, le servo tournera de 0 degrés à 90 degrés à 180 degrés, puis de 180 degrés à 90 degrés à 0 degrés, en cercle.
Avertissement
Si vous recevez le message d’erreur RuntimeError: Cannot determine SOC peripheral base address, veuillez consulter Si « gpiozero » ne fonctionne pas.
Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci-dessous. Mais avant cela, vous devez accéder au chemin source du code comme raphael-kit/python-pi5. Après avoir modifié le code, vous pouvez l’exécuter directement pour voir l’effet.
#!/usr/bin/env python3
from gpiozero import Servo
from time import sleep
# Set the GPIO pin number where the servo motor is connected
myGPIO = 18
# Define a correction factor to fine-tune servo pulse width
myCorrection = 0.45
maxPW = (2.0 + myCorrection) / 1000 # Calculate maximum pulse width
minPW = (1.0 - myCorrection) / 1000 # Calculate minimum pulse width
# Initialize the Servo object with custom pulse widths
servo = Servo(myGPIO, min_pulse_width=minPW, max_pulse_width=maxPW)
try:
while True:
# Position the servo at the middle and wait
servo.mid()
print("mid") # Indicate current position
sleep(0.5) # Brief pause for 0.5 seconds
# Move the servo to its minimum position and wait
servo.min()
print("min") # Indicate current position
sleep(1) # Hold position for 1 second
# Return the servo to the middle position and wait
servo.mid()
print("mid") # Indicate current position
sleep(0.5) # Brief pause for 0.5 seconds
# Move the servo to its maximum position and wait
servo.max()
print("max") # Indicate current position
sleep(1) # Hold position for 1 second
except KeyboardInterrupt:
# Gracefully terminate the script on a keyboard interrupt (Ctrl+C)
pass
Explication du Code
Ces instructions d’importation incluent la classe
Servopour le contrôle du servo et la fonctionsleeppour le timing.#!/usr/bin/env python3 from gpiozero import Servo from time import sleep
Définit le numéro de la broche GPIO 18 pour connecter le moteur servo.
# Set the GPIO pin number where the servo motor is connected myGPIO = 18
Ces lignes définissent un facteur de correction et l’utilisent pour calculer les largeurs d’impulsion maximales et minimales pour le servo, ajustant ainsi sa plage de mouvement.
# Define a correction factor to fine-tune servo pulse width myCorrection = 0.45 maxPW = (2.0 + myCorrection) / 1000 # Calculate maximum pulse width minPW = (1.0 - myCorrection) / 1000 # Calculate minimum pulse width
Initialise l’objet Servo avec la broche GPIO spécifiée et des largeurs d’impulsion personnalisées.
# Initialize the Servo object with custom pulse widths servo = Servo(myGPIO, min_pulse_width=minPW, max_pulse_width=maxPW)
Le bloc
trycontient une bouclewhile Truepour déplacer continuellement le servo. Le servo est positionné aux points milieu, min et max, chaque position étant imprimée et maintenue pendant une durée spécifiée.try: while True: # Position the servo at the middle and wait servo.mid() print("mid") # Indicate current position sleep(0.5) # Brief pause for 0.5 seconds # Move the servo to its minimum position and wait servo.min() print("min") # Indicate current position sleep(1) # Hold position for 1 second # Return the servo to the middle position and wait servo.mid() print("mid") # Indicate current position sleep(0.5) # Brief pause for 0.5 seconds # Move the servo to its maximum position and wait servo.max() print("max") # Indicate current position sleep(1) # Hold position for 1 second except KeyboardInterrupt: # Gracefully terminate the script on a keyboard interrupt (Ctrl+C) pass