Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
2.2.6 Module Capteur de Vitesse
Introduction
Dans ce projet, nous allons apprendre à utiliser le module capteur de vitesse. Un module capteur de vitesse est un type de tachymètre utilisé pour mesurer la vitesse d’un objet en rotation, comme un moteur.
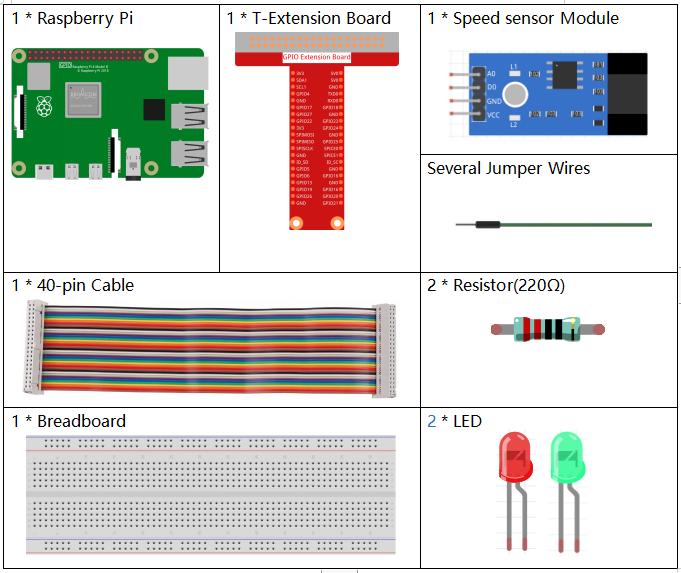
Composants Nécessaires
Pour ce projet, nous avons besoin des composants suivants :
Il est très pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément via les liens ci-dessous.
INTRODUCTION DES COMPOSANTS |
LIEN D’ACHAT |
|---|---|
- |
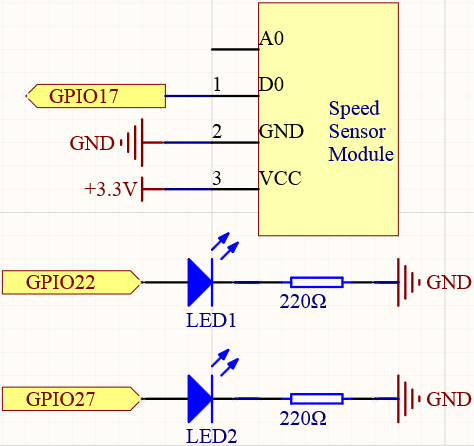
Schéma Électrique
Procédures Expérimentales
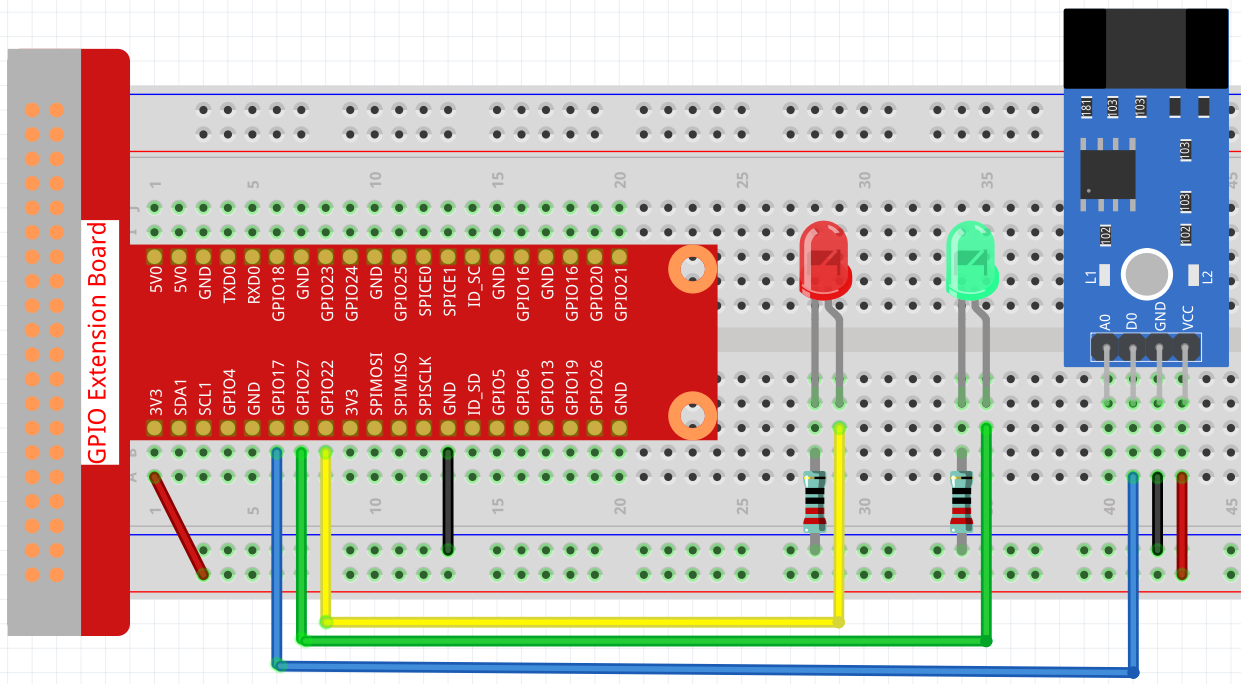
Étape 1 : Construire le circuit.
Étape 2 : Changer de répertoire.
cd ~/raphael-kit/python
Étape 3 : Exécuter.
sudo python3 2.2.6_speed_sensor_module.py
Après l’exécution du code, la LED verte s’allumera. Si vous placez un obstacle dans l’ouverture du module capteur de vitesse, « light blocked » sera imprimé à l’écran et la LED rouge s’allumera. Retirez l’obstacle et la LED verte s’allumera à nouveau.
Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci-dessous. Mais avant cela, vous devez accéder au chemin du code source comme raphael-kit/python. Après avoir modifié le code, vous pouvez l’exécuter directement pour voir l’effet.
#!/usr/bin/env python3
import RPi.GPIO as GPIO
speedPin = 17
Gpin = 27
Rpin = 22
def setup():
GPIO.setmode(GPIO.BCM) #
GPIO.setup(Gpin, GPIO.OUT) # Set Green Led Pin mode to output
GPIO.setup(Rpin, GPIO.OUT) # Set Red Led Pin mode to output
GPIO.setup(speedPin, GPIO.IN, pull_up_down=GPIO.PUD_UP) # Set speedPin's mode is input, and pull up to high level(3.3V)
GPIO.add_event_detect(speedPin, GPIO.BOTH, callback=detect, bouncetime=200)
def Led(x):
if x == 0:
GPIO.output(Rpin, 0)
GPIO.output(Gpin, 1)
if x == 1:
GPIO.output(Rpin, 1)
GPIO.output(Gpin, 0)
print ('Light was blocked')
def detect(chn):
Led(GPIO.input(speedPin))
def loop():
while True:
pass
def destroy():
GPIO.output(Gpin, GPIO.LOW) # Green led off
GPIO.output(Rpin, GPIO.LOW) # Red led off
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child program destroy() will be executed.
destroy()
Explication du Code
GPIO.add_event_detect(speedPin, GPIO.BOTH, callback=detect, bouncetime=200)
Ajouter un événement ici, déclenché par un changement de niveau de speedPin et appeler detect() pour contrôler l’allumage et l’extinction des 2 LEDs.
def Led(x):
if x == 0:
GPIO.output(Rpin, 0)
GPIO.output(Gpin, 1)
if x == 1:
GPIO.output(Rpin, 1)
GPIO.output(Gpin, 0)
print ('Light was blocked')
Définir une fonction Led() qui allume la LED rouge et affiche Light was blocked lorsque le paramètre est 1 ; allume la LED verte lorsque le paramètre est 0.
def detect(chn):
Led(GPIO.input(speedPin))
Définir une fonction de rappel où la valeur de speedPin contrôlera l’allumage ou l’extinction des 2 LEDs.
Image du Phénomène
