Nota
¡Hola, bienvenido a la Comunidad de Entusiastas de SunFounder Raspberry Pi & Arduino & ESP32 en Facebook! Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprender y compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Preestrenos exclusivos: Obtén acceso anticipado a nuevos anuncios de productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones especiales de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
2.1.9 Joystick (MCP3008)
Nota
Dependiendo de la versión de tu kit, identifica si tienes ADC0834 o MCP3008 y procede con la sección correspondiente.
Introducción
En este proyecto, aprenderemos cómo funciona el joystick. Manipulamos el joystick y mostramos los resultados en la pantalla.
Componentes requeridos
En este proyecto, necesitamos los siguientes componentes.
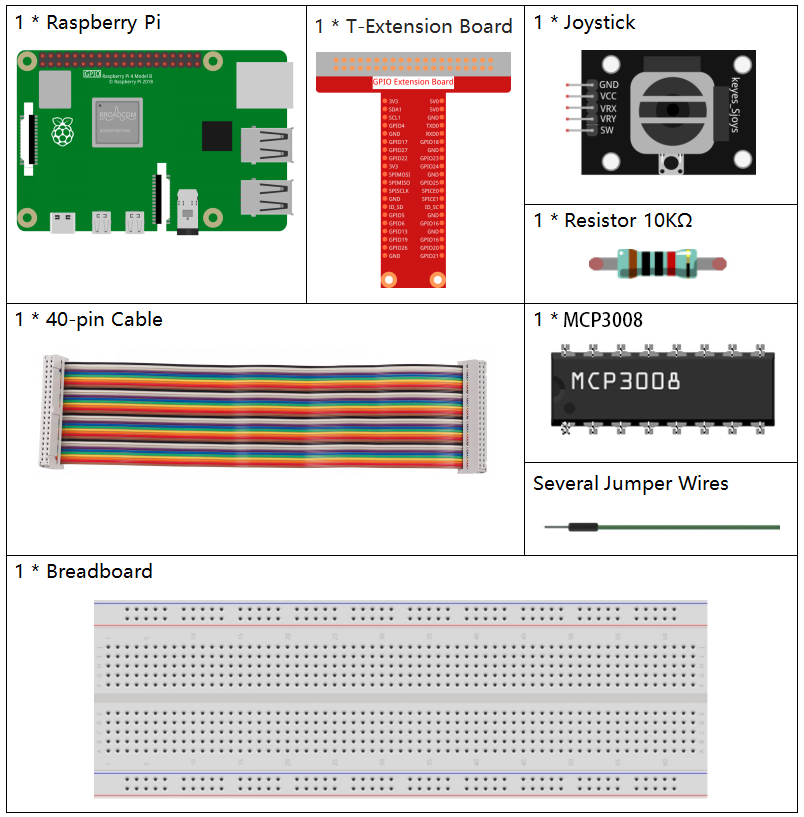
Es definitivamente conveniente comprar un kit completo, aquí tienes el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Raphael |
337 |
También puedes comprarlos por separado en los siguientes enlaces.
INTRODUCCIÓN DEL COMPONENTE |
ENLACE DE COMPRA |
|---|---|
- |
|
- |
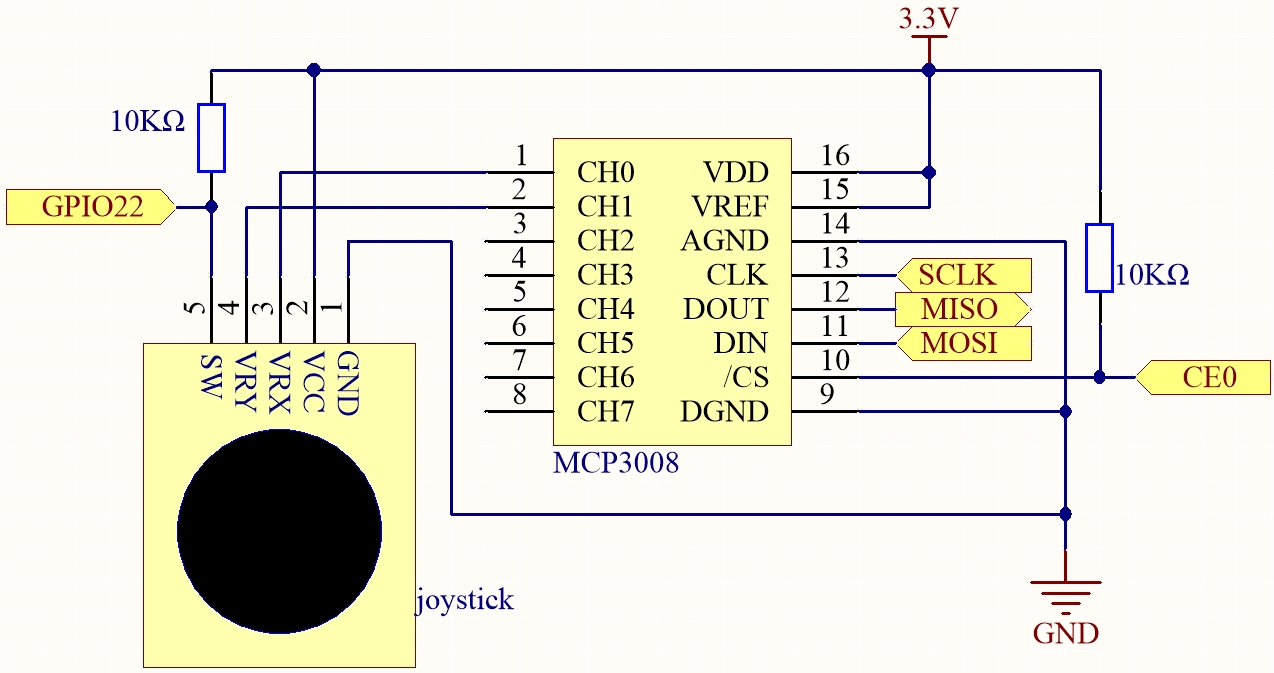
Diagrama esquemático
Cuando se leen los datos del joystick, existen algunas diferencias entre los ejes: Los datos de los ejes X e Y son analógicos, lo que requiere usar el MCP3008 para convertir el valor analógico a digital. Los datos del eje Z son digitales, por lo que puedes leerlos directamente desde el GPIO o también usando un ADC.
Nombre |
T-Board |
WiringPi |
BCM |
|---|---|---|---|
SPICE0 |
pin24 |
10 |
8 |
SPIMOSI |
pin19 |
12 |
10 |
SPIMISO |
pin21 |
13 |
9 |
SPISCLK |
pin23 |
14 |
11 |
GPIO22 |
pin15 |
3 |
22 |
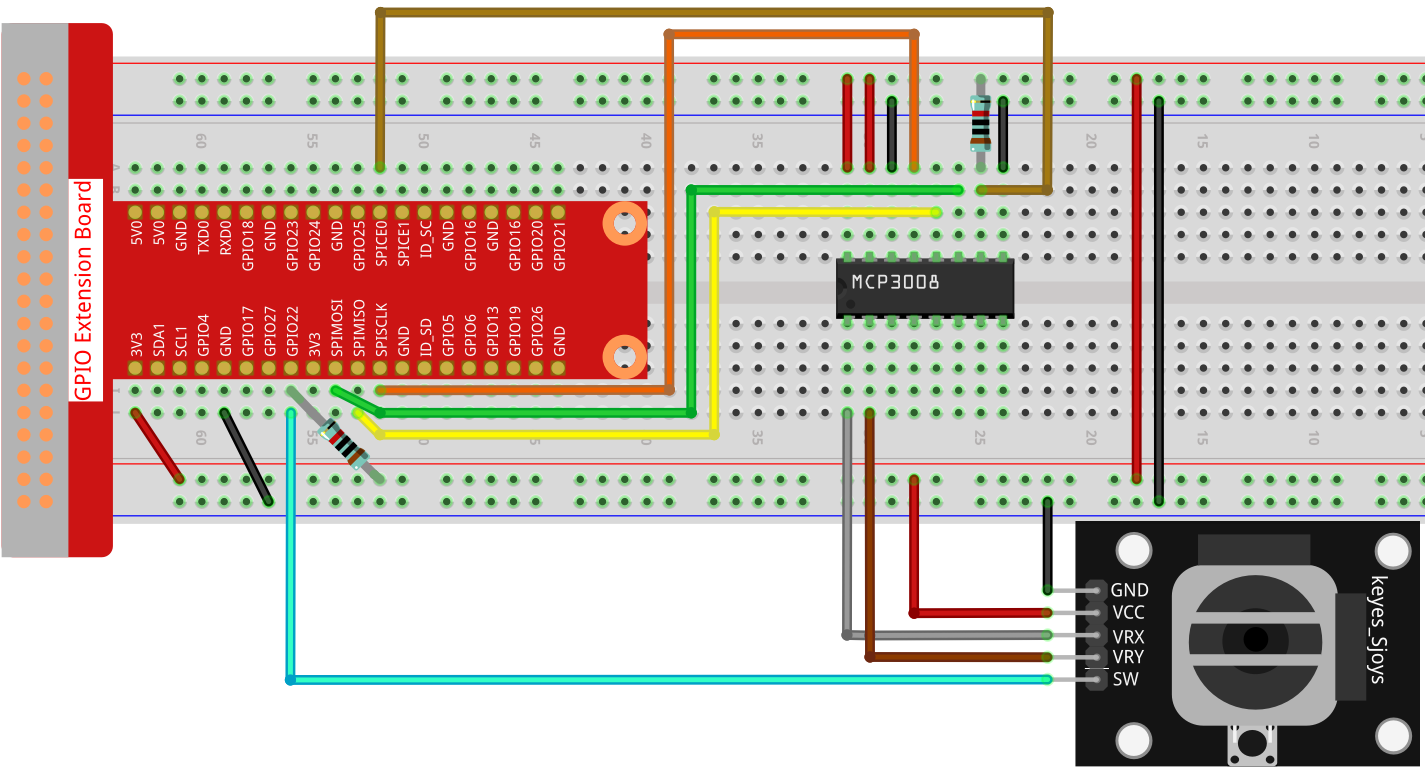
Procedimientos experimentales
Paso 1: Construye el circuito.
Paso 2: Configura la interfaz SPI e instala la librería spidev (consulta Configuración de SPI para obtener instrucciones detalladas).
Si ya has completado estos pasos, puedes omitirlos.
Paso 3: Ve a la carpeta del código.
cd ~/raphael-kit/python-pi5
Paso 4: Ejecuta el programa.
sudo python3 2.1.9-2_Joystick_zero.py
Después de ejecutar el código, mueve el joystick y se mostrarán en pantalla los valores correspondientes de X, Y y Btn.
Advertencia
Si aparece el error RuntimeError: Cannot determine SOC peripheral base address, consulta Si «gpiozero» no funciona.
Código
Nota
Puedes Modificar/Restablecer/Copiar/Ejecutar/Detener el siguiente código.
Pero antes de eso, necesitas ir a la ruta del código fuente como raphael-kit/python-pi5.
Después de modificar el código, puedes ejecutarlo directamente para ver el efecto.
#!/usr/bin/env python3
from gpiozero import Button
import spidev
import time
# Inicializa el botón conectado al pin GPIO 22 (pin SW del joystick)
BtnPin = Button(22)
# Inicializa la comunicación SPI con el MCP3008
spi = spidev.SpiDev()
spi.open(0, 0) # Abrir bus SPI 0, dispositivo CE0
spi.max_speed_hz = 1000000 # Velocidad SPI: 1 MHz
def read_adc(channel):
"""
Lee el valor analógico del canal especificado del MCP3008 (0–7)
:param channel: número de canal ADC (0–7)
:return: valor entero de 10 bits (0–1023)
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
try:
# Bucle principal para leer y mostrar valores del joystick y estado del botón
while True:
# Leer valores de X y Y desde los canales 0 y 1 del MCP3008
x_val = read_adc(0) # Joystick VRX conectado al CH0
y_val = read_adc(1) # Joystick VRY conectado al CH1
# Leer el estado del botón del joystick (SW)
Btn_val = BtnPin.value # 0 = presionado, 1 = liberado
# Imprimir los valores leídos
print('X: %d Y: %d Btn: %d' % (x_val, y_val, Btn_val))
# Esperar 0.2 segundos antes de la siguiente lectura
time.sleep(0.2)
# Manejo de interrupción con Ctrl+C
except KeyboardInterrupt:
spi.close()
Explicación del código
Esta sección importa las librerías necesarias:
gpiozero.Buttonse usa para leer el estado digital del botón del joystick (pin SW).spidevse usa para la comunicación SPI con el chip ADC MCP3008.timese usa para los retrasos entre lecturas.
#!/usr/bin/env python3 from gpiozero import Button import spidev import time
Inicializa el botón conectado al pin GPIO22 (pin SW del joystick) y configura la interfaz SPI en el bus 0, chip select 0 (CE0). La velocidad SPI se establece en 1 MHz.
BtnPin = Button(22) spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000
Define la función
read_adc(channel)para leer el valor analógico de un canal específico del MCP3008 (0–7). Envía tres bytes usando el protocolo SPI y devuelve un valor de 10 bits (0–1023).def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
En el bucle principal, lee los valores analógicos de VRX (conectado a CH0) y VRY (conectado a CH1), así como el estado del botón del joystick. Los valores se imprimen en la consola cada 0.2 segundos. Cuando se presiona Ctrl+C, la interfaz SPI se cierra correctamente.
try: while True: x_val = read_adc(0) y_val = read_adc(1) Btn_val = BtnPin.value print('X: %d Y: %d Btn: %d' % (x_val, y_val, Btn_val)) time.sleep(0.2) except KeyboardInterrupt: spi.close()