备注
您好,欢迎加入 SunFounder 树莓派与 Arduino 及 ESP32 爱好者社区!与众多爱好者一起深入探索树莓派、Arduino 和 ESP32。
为什么要加入?
专业支持:借助我们的社区和团队,解决售后问题和技术难题。
学习与分享:交流技巧和教程,提升您的技能。
独家预览:抢先获取新产品公告和先睹为快的机会。
特别折扣:享受我们最新产品的独家折扣。
节日促销与赠品:参与赠品和假日促销活动。
👉 准备好与我们一起探索和创造了吗?点击 [here],立即加入吧!
舵机调整(重要)
警告
如果您的 PiDog 是 V2 版本,请跳过本部分,因为舵机角度已在组装时调整完毕。
舵机的角度范围为 -90~90,但出厂时设置的角度是随机的,可能是 0°,也可能是 45°;如果直接用这样的角度进行组装,机器人运行代码后会导致混乱状态,更严重的是,可能会导致舵机卡死甚至烧毁。
因此,我们需要将所有舵机的角度设置为 0° 后再进行安装,这样舵机角度处于中间位置,无论向哪个方向转动都没问题。
为确保舵机已正确设置为 0°,先将舵机臂插入舵机输出轴,然后轻轻将摇臂旋转到不同的角度。这个舵机臂只是为了让您清晰地看到舵机在旋转。

现在,运行
examples/文件夹中的servo_zeroing.py。cd ~/pidog/examples sudo python3 servo_zeroing.py
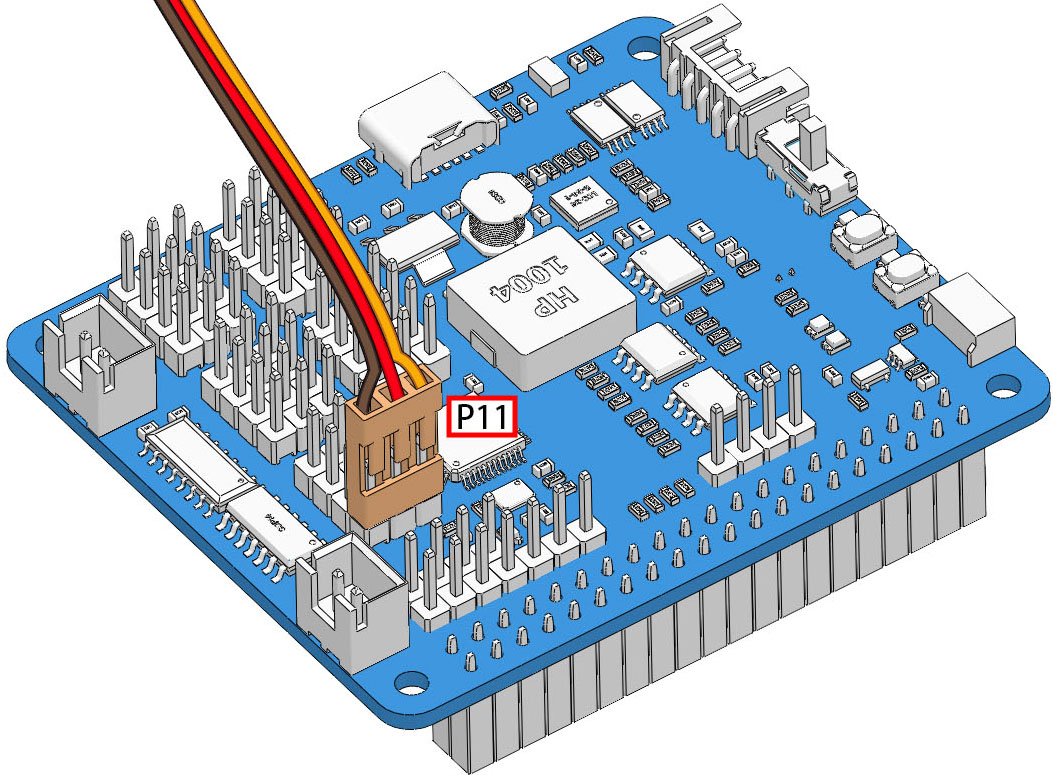
接下来,按如下方式将舵机线插入 P11 端口,同时您会看到舵机臂旋转到一个位置(这是 0° 位置,是一个随机位置,可能不垂直也不平行)。
现在,取下舵机臂,确保舵机线保持连接,不要关闭电源。然后按照纸质说明继续组装。
备注
在用舵机螺丝固定之前,不要拔下这根舵机线,固定后才能拔下。
请勿在通电状态下转动舵机,以免损坏;如果舵机输出轴未以正确角度插入,请拔出舵机并重新插入。
在组装每个舵机之前,需要将舵机线插入 PWM 引脚并打开电源,将其角度设置为 0°。