备注
你好,欢迎加入 SunFounder Raspberry Pi & Arduino & ESP32 爱好者Facebook社区!与 fellow enthusiasts 一起深入探索 Raspberry Pi、Arduino 和 ESP32。
为什么要加入?
专家支持:获得社区和团队的帮助,解决售后问题和技术难题。
学习与分享:交流技巧和教程,提升你的技能。
独家预览:抢先获取新产品公告和 sneak peeks。
特别折扣:享受我们最新产品的独家折扣。
节日促销与抽奖:参与抽奖和节日促销活动。
👉 准备好和我们一起探索和创造了吗?点击 [here],立即加入吧!
2. 校准 PiDog
简介
校准 PiDog 是确保其稳定高效运行的关键步骤。此过程有助于纠正因装配或结构误差导致的任何不平衡或不精确。请仔细按照以下步骤操作,确保你的 PiDog 行走顺畅,性能符合预期。
如果偏差角度过大,请返回 舵机调整(重要),将舵机角度设置为 0°,然后按照说明重新组装 PiDog。
校准视频
详细指南请参考完整的校准教程视频。该视频将以视觉化方式逐步演示如何精确校准你的 PiDog。
备注
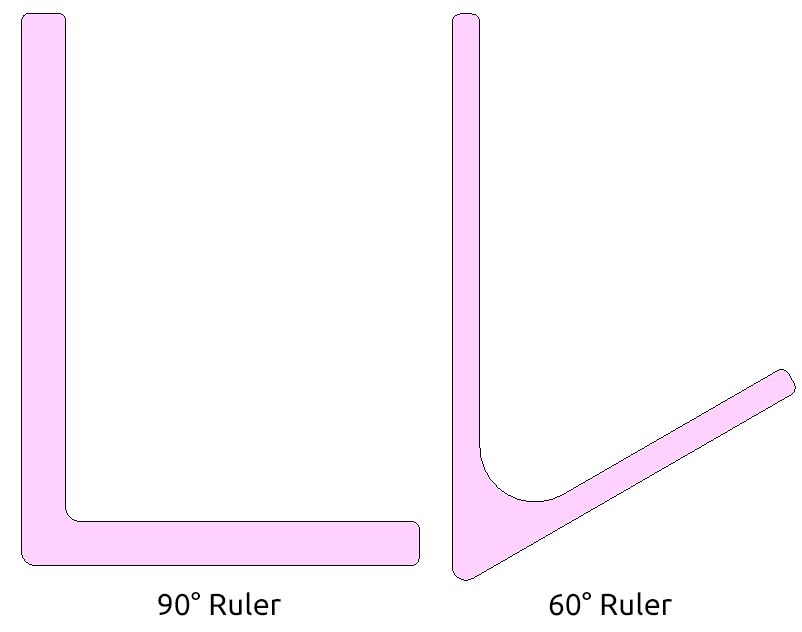
PiDog 套件包含一个 90° 或 60° 的校准尺。视频中使用的是 90° 校准尺,但 60° 的校准过程非常相似。你也可以参考下方的图文分步指南。
步骤
请按照以下步骤操作:
将 PiDog 放置在平坦的平台上。
进入 PiDog 示例代码目录,运行
0_calibration.py脚本。cd ~/pidog/examples sudo python3 0_calibration.py
运行脚本后,终端将出现一个交互界面。选择你拥有的校准尺类型: 选项 1 对应 90°,选项 2 对应 60°。
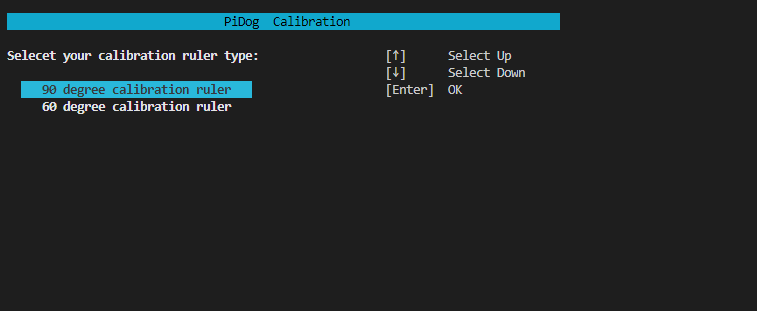
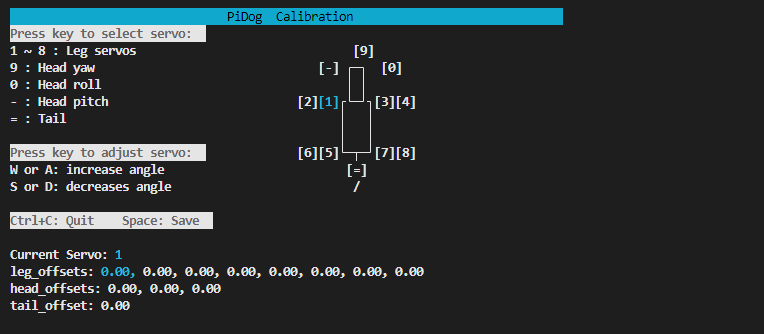
做出选择后,将出现以下校准界面:
如果你使用的是 60° 校准尺
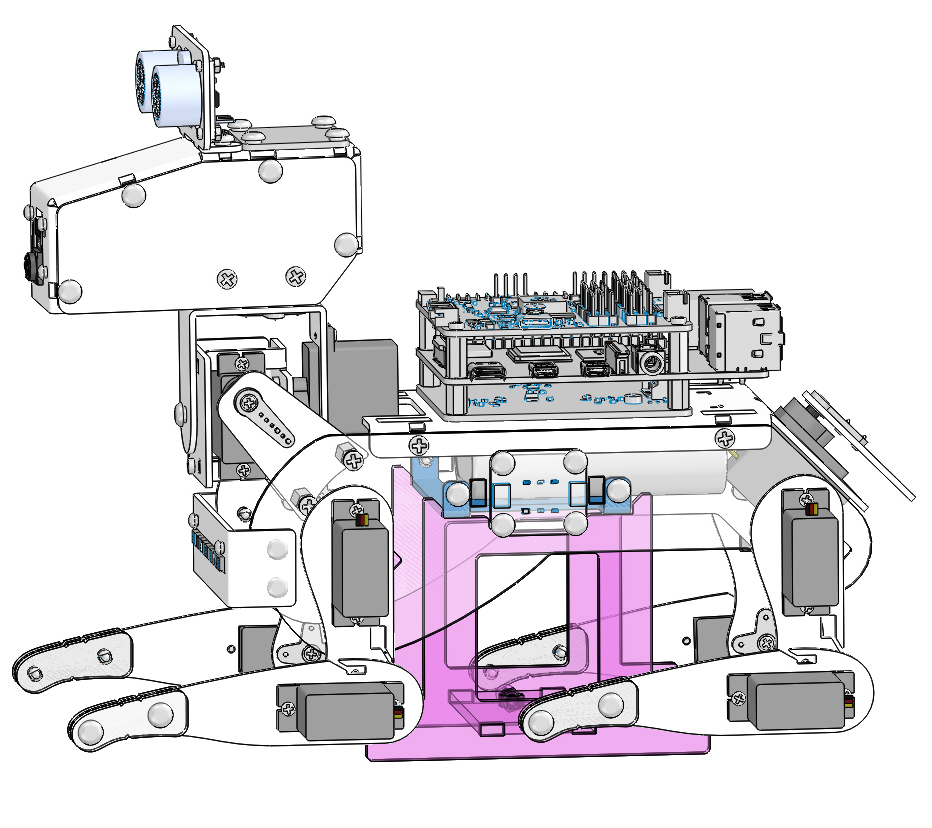
如图所示放置**校准尺(亚克力 C 形板)**,长边置于水平面上。在终端中按
1,然后使用w和s键调整对齐。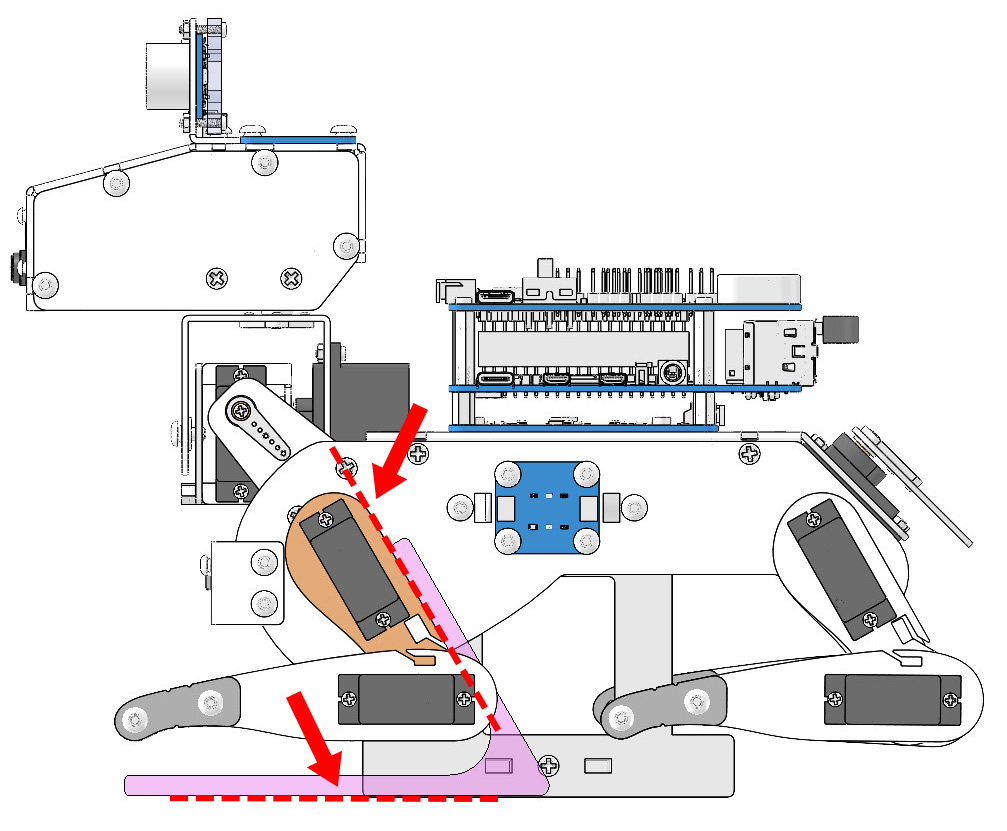
按下图所示重新放置**校准尺**。在终端中按
2,然后使用w和s键微调对齐。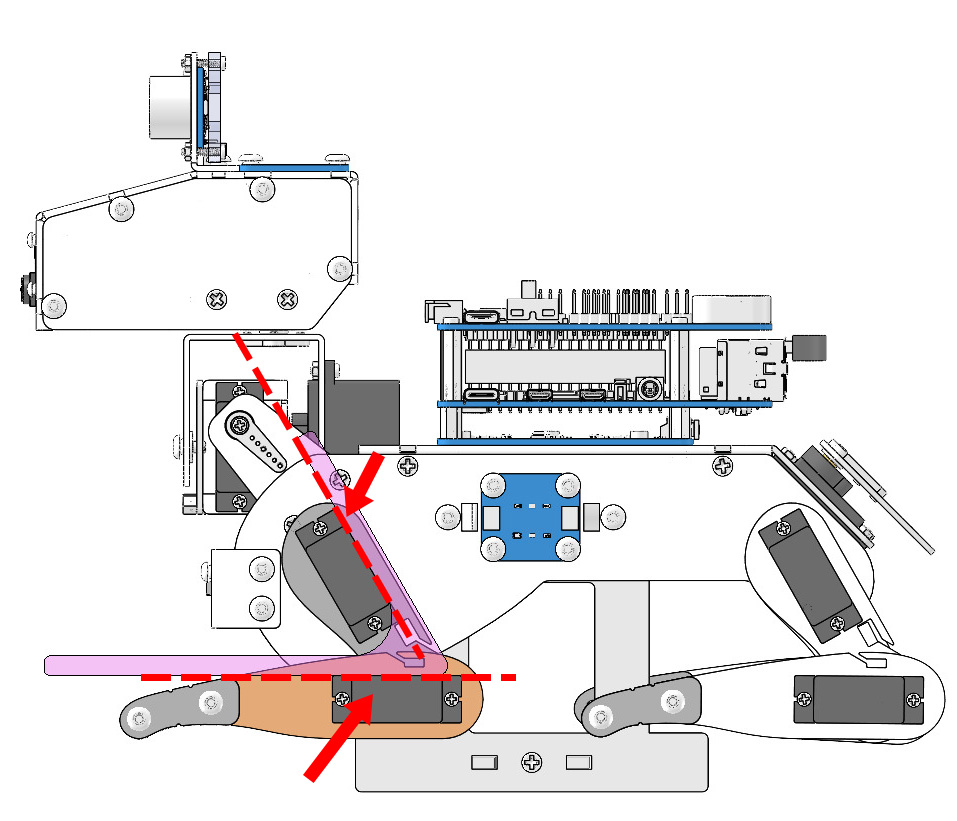
对舵机 3 至 8 重复校准过程,确保 PiDog 的四条腿均正确校准。
如果你使用的是 90° 校准尺
如图所示放置**校准尺(亚克力 C 形板)**。在终端中按
1,然后使用w和s键将其边缘与图示对齐。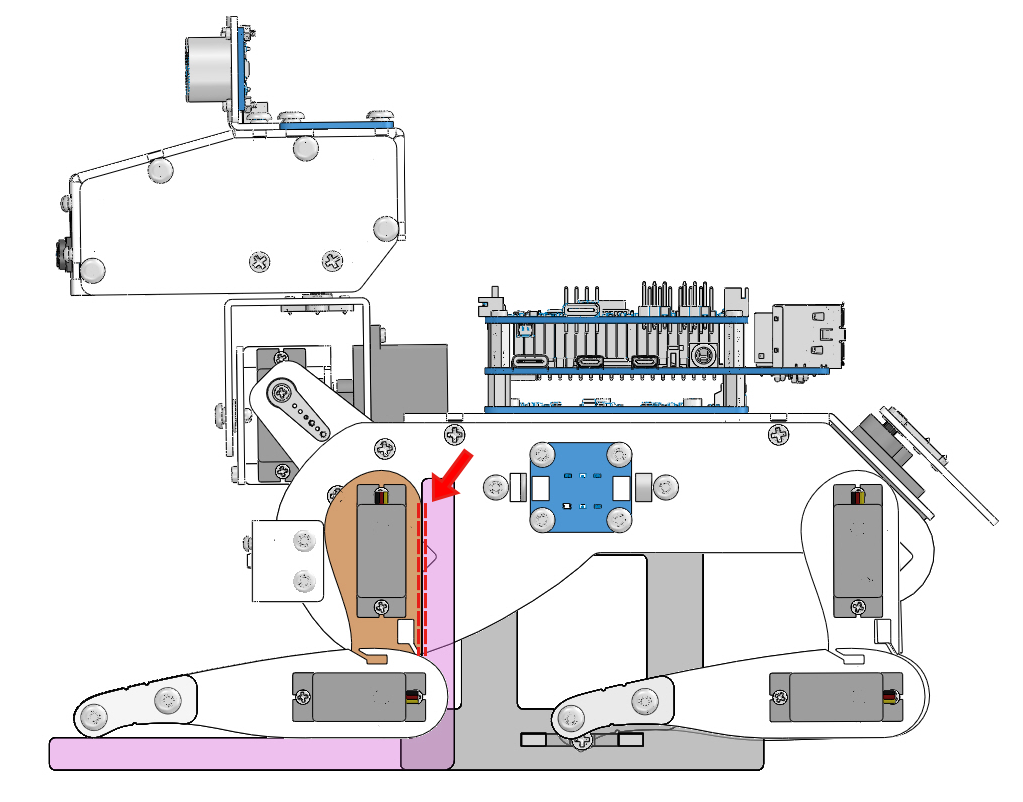
如图所示重新放置**校准尺(亚克力 C 形板)**。在终端中按
2,然后再次使用w和s键进行调整。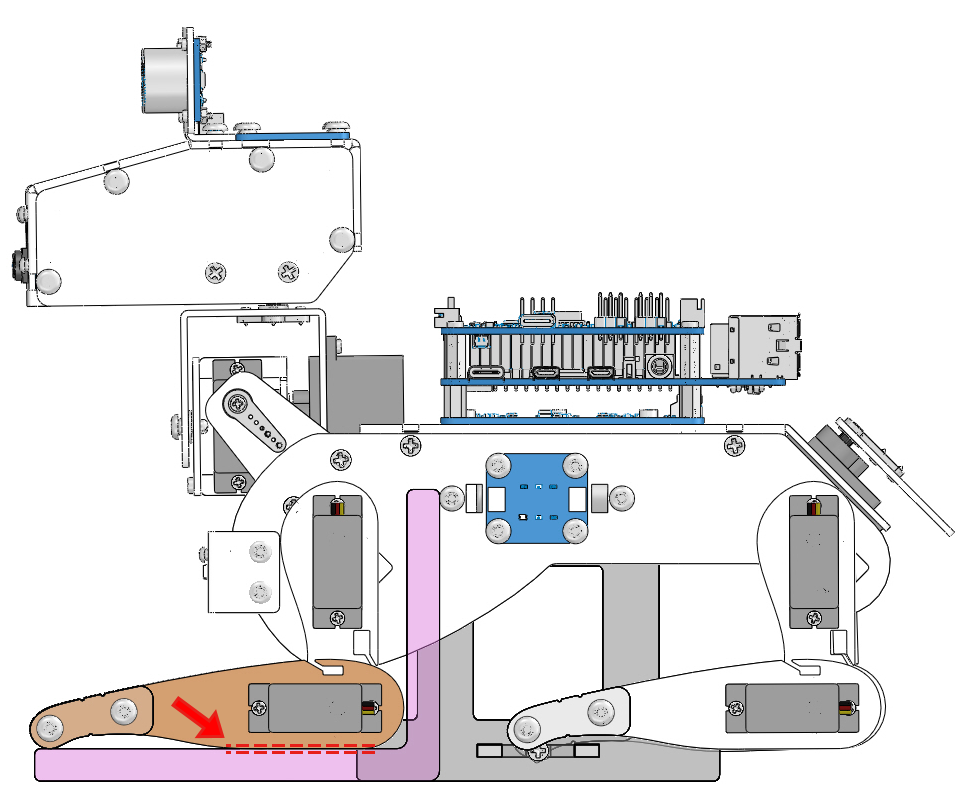
对舵机 3 至 8 重复校准步骤,确保 PiDog 的四条腿均正确校准。
完成校准
所有舵机校准完成后,重新运行 PiDog 行走或姿态示例代码,检查动作是否顺畅。
如果仍有偏差,请返回校准程序进行微调。
强烈建议在初始组装后完成此步骤,以确保运行期间的稳定性能。
小技巧
为避免将来重新校准,可以在校准后记录舵机角度或导出配置文件。这样下次可以轻松快速恢复设置。