21. Verwenden von OpenClaw zur Steuerung von PiDog
Was ist OpenClaw?
Stellen Sie es sich als eine erweiterte Version von ChatGPT vor. Während traditionelle Chatbots nur sprechen (Text generieren) können, kann OpenClaw handeln. Es versteht Ihre Anweisungen in natürlicher Sprache und kann tatsächlich Operationen auf Ihrem Computer ausführen, wie z. B. Befehle ausführen, Dateien verwalten und verschiedene Werkzeuge aufrufen.
Hier sind einige fantastische Anwendungsszenarien:
Persönlicher Allround-Assistent: Lassen Sie es Ihnen helfen, Ihren Zeitplan zu verwalten, Erinnerungen zu setzen und Aufgaben zu verfolgen. Sie müssen es ihm nur in einer Chat-App (wie Telegram, WhatsApp) sagen, und es wird sich erinnern und ausführen.
Automatisierungs-„Kleber“: Es kann als Bindeglied für Ihre verschiedenen Dienste fungieren. Sie können es zum Beispiel eine Website auf Preisänderungen überwachen lassen. Sobald ein Preisverfall erkannt wird, kann es automatisch einen n8n-Automatisierungs-Workflow auslösen, um Ihnen eine E-Mail-Benachrichtigung zu senden.
Dedizierter Entwicklungsassistent: Lassen Sie es Ihnen bei der Verwaltung von Servern, dem Ausführen von Skripten und dem Überprüfen von Protokollen helfen. Sie können einfach sagen: „Überprüfe die Systemauslastung für mich“, und es kann per SSH auf Ihren Server zugreifen, den Befehl ausführen und die Ergebnisse zurückliefern.
Hardware-„Spielkamerad“: Dies ist ein sehr interessanter Anwendungsfall. Sie können OpenClaw Hardware steuern lassen, die an einen Raspberry Pi angeschlossen ist. Ein Entwickler hat es zum Beispiel verwendet, um einen Roboter-Staubsauger mit einem mechanischen Arm zu steuern, oder es sogar dazu gebracht, Renndaten zu analysieren und auf einem LED-Bildschirm anzuzeigen. Das offizielle Raspberry Pi-Team hat es sogar verwendet, um eine automatische Fotobox für eine Hochzeit zu bauen – nur durch Konversation, ohne eine einzige Zeile Code zu schreiben!
Wichtig
Der Raspberry Pi Zero 2W hat nur 512 MB RAM, während OpenClaw mindestens 1 GB benötigt. Daher kann es nicht richtig laufen. Ein Raspberry Pi 4/5 oder höher wird empfohlen.
Quick Start OpenClaw
Wenn Sie die Leistungsfähigkeit von OpenClaw so schnell wie möglich erleben möchten, verwenden Sie diese Methode. Sie wird den interaktiven Einrichtungsassistenten automatisch installieren und starten.
Öffnen Sie das Terminal auf Ihrem Raspberry Pi und führen Sie den folgenden Befehl direkt aus. Dieser Befehl lädt das Installationsskript von der offiziellen Website herunter und führt es aus:
curl -fsSL https://openclaw.ai/install.sh | bash
Bemerkung
Aufgrund schneller Aktualisierungen neuer Versionen ist es normal, wenn Ihre Installationsschritte leicht abweichen.
Das Skript lädt OpenClaw automatisch herunter und installiert es.
Sie sehen dann eine Sicherheitsabfrage, ob Sie OpenClaw vertrauen. Wenn Sie sicher sind, dass es sicher und zuverlässig ist, navigieren Sie mit den Pfeiltasten zu „Yes“ und drücken Sie die Eingabetaste.
Wählen Sie Quick Start und drücken Sie dann die Eingabetaste.

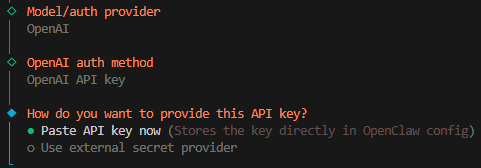
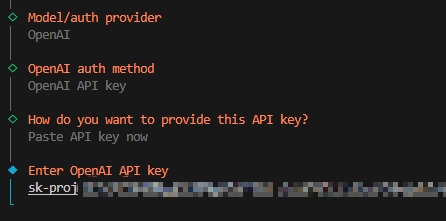
Wählen Sie Ihr Model und drücken Sie dann die Eingabetaste. Hier verwenden wir OpenAI als Beispiel.
Wählen Sie OpenAI API Key.
Fügen Sie jetzt den API-Schlüssel ein.
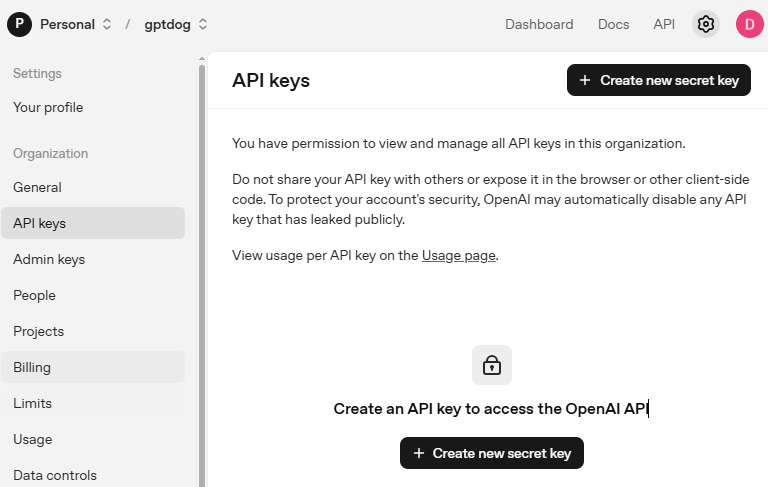
Gehen Sie zu OpenAI Platform und melden Sie sich an. Klicken Sie auf der Seite API keys auf Create new secret key.
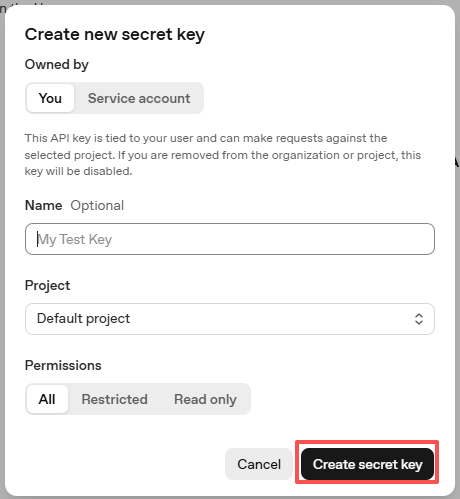
Füllen Sie die Details aus (Owner, Name, Projekt und Berechtigungen, falls erforderlich) und klicken Sie dann auf Create secret key.
Sobald der Schlüssel erstellt ist, kopieren Sie ihn sofort – Sie werden ihn nicht wieder sehen können. Wenn Sie ihn verlieren, müssen Sie einen neuen generieren.
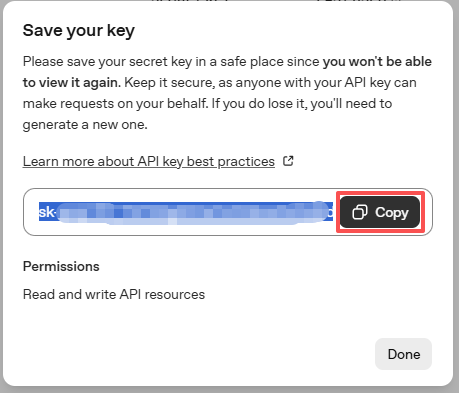
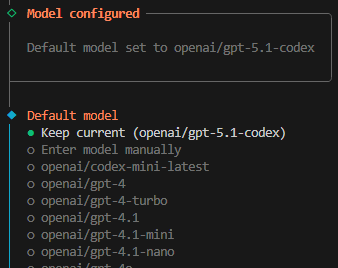
Fügen Sie den Schlüssel in die OpenClaw-Konfiguration ein.
Wählen Sie das Model aus, das Sie verwenden möchten. In diesem Beispiel verwenden wir Keep current.
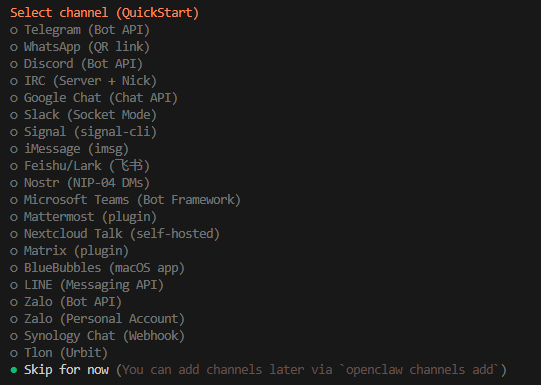
Als Nächstes folgt die Kanalauswahl. Kanäle beziehen sich auf die von OpenClaw unterstützten Kommunikationsdienste, wie Telegram, WhatsApp, Discord und mehr. Verwenden Sie die Abwärtspfeiltaste, um die Option „Skip for now“ auszuwählen, und drücken Sie dann die Eingabetaste.
Als Nächstes werden Sie gefragt, ob Sie sofort Fähigkeiten (Skills) konfigurieren möchten. Wählen Sie „Yes“ und drücken Sie die Eingabetaste.
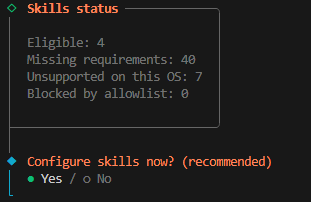
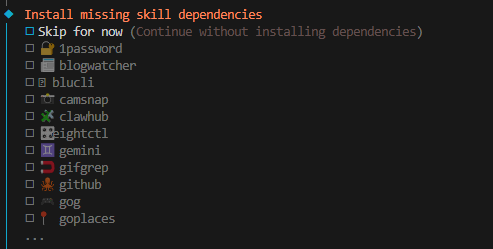
Installieren Sie die benötigten Fähigkeiten. Im folgenden Beispiel wählen wir die Option „Skip for now“ (Leertaste zum Auswählen) und drücken dann die Eingabetaste.
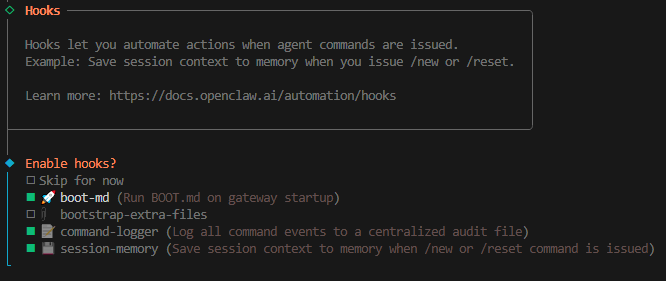
Als Nächstes kommen Hooks; wir werden „command-logger“ und „session-memory“ auswählen.
Die Installation ist nun abgeschlossen. Sie können OpenClaw starten, indem Sie „Hatch in TUI“ auswählen und die Eingabetaste drücken.
Bemerkung
Sie können OpenClaw starten, indem Sie den folgenden Befehl eingeben:
openclaw tui
Und Sie können die TUI-Schnittstelle durch zweimaliges Drücken von Strg+c verlassen.
OpenClaw in die Lage versetzen, den PiDog zu steuern
Was ist PiDog Skill?
PiDog Skill ist eine Erweiterung für OpenClaw, die es Ihnen ermöglicht, Ihren SunFounder PiDog V2 Roboterhund über natürliche Sprache zu steuern. Anstatt sich komplexe Befehlszeilenparameter merken zu müssen, können Sie OpenClaw einfach sagen, was PiDog tun soll – wie „lass den Hund sitzen“ oder „schalte die LED-Leuchten auf lila“ – und OpenClaw wird automatisch die entsprechenden Befehle ausführen.
Hier sind einige Dinge, die Sie mit PiDog Skill tun können:
Basisaktionen: PiDog stehen, sitzen, liegen, mit dem Schwanz wedeln, bellen, vorwärts/rückwärts gehen oder links/rechts drehen lassen
Posen halten: PiDog für längere Zeit in einer bestimmten Pose halten (wie z. B. Stehen)
LED-Lichtsteuerung: Ändern der Augenfarben mit Effekten wie Atmen, Hören, Boom oder Dauerlicht
Farbanpassung: Wählen Sie aus Rot, Grün, Blau, Gelb, Lila, Pink, Cyan, Weiß, Orange oder benutzerdefinierten Hex-Farben
Voraussetzungen
Bevor Sie PiDog Skill mit OpenClaw verwenden können, stellen Sie sicher, dass Sie Folgendes haben:
PiDog V2 korrekt zusammengebaut und mit Ihrem Raspberry Pi verbunden
OpenClaw installiert und läuft
Die folgenden Verzeichnisse existieren auf Ihrem System:
~/pidog
~/robot-hat
~/vilib
Sie können die Installation überprüfen, indem Sie Folgendes ausführen:
python3 -c "import pidog"
Wenn dieser Befehl fehlerfrei ausgeführt wird, können Sie fortfahren.
Installieren von PiDog Skill
Befolgen Sie diese Schritte, um PiDog Skill für OpenClaw zu installieren:
Erstellen Sie das Skills-Verzeichnis (falls es nicht bereits existiert):
mkdir -p ~/.openclaw/workspace/skills/
Kopieren Sie die PiDog-Skill-Dateien in das OpenClaw-Skills-Verzeichnis:
cp -r ~/pidog/pidog-control ~/.openclaw/workspace/skills/pidog-control/Bemerkung
Ersetzen Sie
~/pidog-skilldurch den tatsächlichen Pfad, in dem sich Ihre PiDog-Skill-Dateien befinden.
Überprüfen Sie die Installation, indem Sie die Skill-Dateien auflisten:
ls ~/.openclaw/workspace/skills/pidog-control/scripts/Sie sollten
pidog_ctl.pyundpidog_rgb_ctl.pyin der Ausgabe sehen.
Testen von PiDog Skill
Bevor Sie den Skill mit OpenClaw verwenden, wird empfohlen, die grundlegende Funktionalität direkt vom Terminal aus zu testen.
Schritt 1: PiDog-Status prüfen
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_ctl.py status
Schritt 2: Führen Sie einen sicheren Test durch
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_ctl.py safe-test
Schritt 3: Testen Sie grundlegende Aktionen
PiDog sitzen lassen:
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_ctl.py action sit
PiDog stehen lassen und die Pose halten:
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_ctl.py action stand --hold
PiDog bellen lassen:
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_ctl.py action bark
Schritt 4: Testen Sie die LED-Leuchten
Testen Sie den Boom-Lichteffekt mit der Farbe Lila:
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_rgb_ctl.py light boom --color purple
Testen Sie andere Lichteffekte:
# Atem-Effekt mit roter Farbe
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_rgb_ctl.py light breath --color red
# Hör-Effekt mit blauer Farbe
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_rgb_ctl.py light listen --color blue
# Lichter ausschalten
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_rgb_ctl.py light off
Verwenden von PiDog Skill in OpenClaw
Sobald Sie bestätigt haben, dass PiDog Skill von der Befehlszeile aus funktioniert, können Sie es innerhalb von OpenClaw verwenden.
Starten Sie OpenClaw TUI:
openclaw tui
Senden Sie Befehle in natürlicher Sprache, um PiDog zu steuern. Hier sind einige Beispiele:
„Lass den Hund sitzen“
„Lass PiDog stehen und bleiben“
„Wedel mit dem Schwanz des Hundes“
„Lass den Hund bellen“
„Schalte die LED-Leuchten mit Boom-Effekt auf Lila“
„Setze die Augenlichter auf Atem-Effekt mit roter Farbe“
„Lass PiDog vorwärts gehen“
OpenClaw wird automatisch Ihre Anfrage in den entsprechenden Befehl übersetzen und auf dem PiDog ausführen.
Verfügbare Aktionen und Befehle
Hier ist die vollständige Liste der unterstützten Aktionen für PiDog Skill:
Aktion |
Beschreibung |
|---|---|
stand |
PiDog aufstehen lassen |
sit |
PiDog hinsetzen lassen |
lie |
PiDog hinlegen lassen |
wag-tail |
Mit dem Schwanz von PiDog wedeln |
bark |
Bellgeräusch erzeugen |
forward |
Vorwärts gehen |
backward |
Rückwärts gehen |
Posen halten:
Fügen Sie --hold zu einer beliebigen Aktion hinzu, um PiDog in dieser Pose zu halten. Zum Beispiel: „stand –hold“
Lichteffekte:
Effekt |
Beschreibung |
|---|---|
off |
Alle LED-Leuchten ausschalten |
breath |
Sanfter Atem-/Pulseffekt |
listen |
Reaktiver Hör-Modus |
boom |
Dynamischer Burst-Effekt (am auffälligsten) |
solid |
Konstantes Dauerlicht (verwenden Sie für bessere Wirkung „boom“) |
Unterstützte Farben:
rot, grün, blau, gelb, lila, pink, cyan, weiß, orange oder Hex-Codes wie #FF5733
Fehlerbehebung
OpenClaw-Probleme
F: Während der Installation erhalte ich den Fehler Error: systemctl is-enabled unavailable: Command failed: systemctl --user is-enabled openclaw-gateway.service. Was soll ich tun?
Sie können dies vorerst ignorieren, könnten aber später auf Probleme stoßen. Bitte beziehen Sie sich dann jeweils darauf.
F: Wenn ich openclaw tui ausführe, erhalte ich den Fehler -bash: openclaw: command not found. Was soll ich tun?
Führen Sie den folgenden Befehl aus:
echo 'export PATH="$HOME/.npm-global/bin:$PATH"' >> ~/.bashrc source ~/.bashrcSie sollten nun die TUI-Schnittstelle mit
openclaw tuistarten können.
F: In openclaw tui erhalte ich not connected to gateway — message not sent oder die Nachricht gateway disconnected: closed.
Dies liegt daran, dass Ihr OpenClaw Gateway-Dienst nicht gestartet ist. Öffnen Sie ein weiteres Terminal und führen Sie den folgenden Befehl aus, um das OpenClaw Gateway zu starten:
openclaw gatewayStarten Sie dann
openclaw tuineu, und Sie können es direkt verwenden.
F: Ich möchte den OpenClaw Gateway-Dienst so einrichten, dass er im Hintergrund läuft / automatisch beim Booten startet. Wie mache ich das?
Normalerweise sollte Ihr OpenClaw Gateway-Dienst automatisch beim Booten starten. Wenn nicht, können Sie ihn manuell mit dem folgenden Befehl starten.
Erstellen Sie das Verzeichnis
~/.config/systemd/user:mkdir -p ~/.config/systemd/user
Erstellen Sie die Datei
openclaw-gateway.service:cat > ~/.config/systemd/user/openclaw-gateway.service << EOF [Unit] Description=OpenClaw Gateway After=network.target [Service] Type=simple ExecStart=$HOME/.npm-global/bin/openclaw gateway run Restart=on-failure RestartSec=10 Environment="PATH=$HOME/.npm-global/bin:/usr/local/bin:/usr/bin:/bin:/usr/sbin" Environment="NODE_ENV=production" [Install] WantedBy=default.target EOF
Laden Sie dann die systemd-Konfiguration neu:
systemctl --user daemon-reload
Starten Sie den Dienst:
systemctl --user start openclaw-gatewayAn diesem Punkt starten Sie
openclaw tuineu und können es direkt verwenden.
Aktivieren Sie den automatischen Start beim Booten:
systemctl --user enable openclaw-gateway
F: Mein OpenClaw kann nicht auf dem System operieren. Was soll ich tun?
Ein neu installiertes OpenClaw hat standardmäßig möglicherweise keine Berechtigung, auf Ihrem Raspberry Pi-System zu operieren; es kann nur chatten. Wir müssen die Berechtigungen manuell konfigurieren.
Öffnen Sie die OpenClaw-Konfigurationsdatei:
nano ~/.openclaw/openclaw.json
Suchen Sie die Option
toolsund ändern Sieprofileundexecwie gezeigt."tools": { "profile": "coding", "exec": { "secrity": "full" } },
Speichern und beenden.
Geben Sie den folgenden Befehl im Terminal ein, um das OpenClaw Gateway neu zu starten:
openclaw gateway restartJetzt sollte OpenClaw Lese- und Schreibberechtigungen haben und auf Ihrem Raspberry Pi-System operieren können.
PiDog-Probleme
F: PiDog reagiert nicht auf Befehle. Was soll ich tun?
Stellen Sie zunächst sicher, dass PiDog ordnungsgemäß angeschlossen und eingeschaltet ist. Testen Sie dann den Basisbefehl:
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_ctl.py statusWenn dies fehlschlägt, überprüfen Sie, ob die erforderlichen Verzeichnisse existieren:
~/pidog
~/robot-hat
~/vilib
F: Der Test import pidog schlägt fehl.
Dies bedeutet, dass die PiDog Python-Bibliothek nicht ordnungsgemäß installiert ist. Bitte lesen Sie die offizielle Installationsanleitung für PiDog V2, um die erforderlichen Bibliotheken zu installieren.
F: LED-Leuchten funktionieren nicht wie erwartet.
Wenn das Dauerlicht nicht deutlich sichtbar ist, verwenden Sie stattdessen den
boom-Effekt – er liefert die auffälligsten Ergebnisse:python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_rgb_ctl.py light boom --color purple
F: OpenClaw erkennt den PiDog-Skill nicht.
Erinnern Sie OpenClaw daran, die Skills zu synchronisieren, indem Sie in der TUI sagen: „Bitte synchronisiere meine Skills“ oder starten Sie das OpenClaw Gateway neu:
openclaw gateway restart
F: Die Bell-Aktion klingt nicht richtig.
Die Bell-Aktion verwendet standardmäßig den Sound
single_bark_1. Dies ist normales Verhalten für PiDog V2.