校准 PiCrawler
由于在安装 PiCrawler 过程中可能存在偏差,或伺服舵机本身存在一定的限制,部分舵机的角度可能会出现轻微偏移,因此需要进行校准。
当然,如果你认为装配已经非常精准,无需调整,可以跳过本章节。
具体步骤如下:
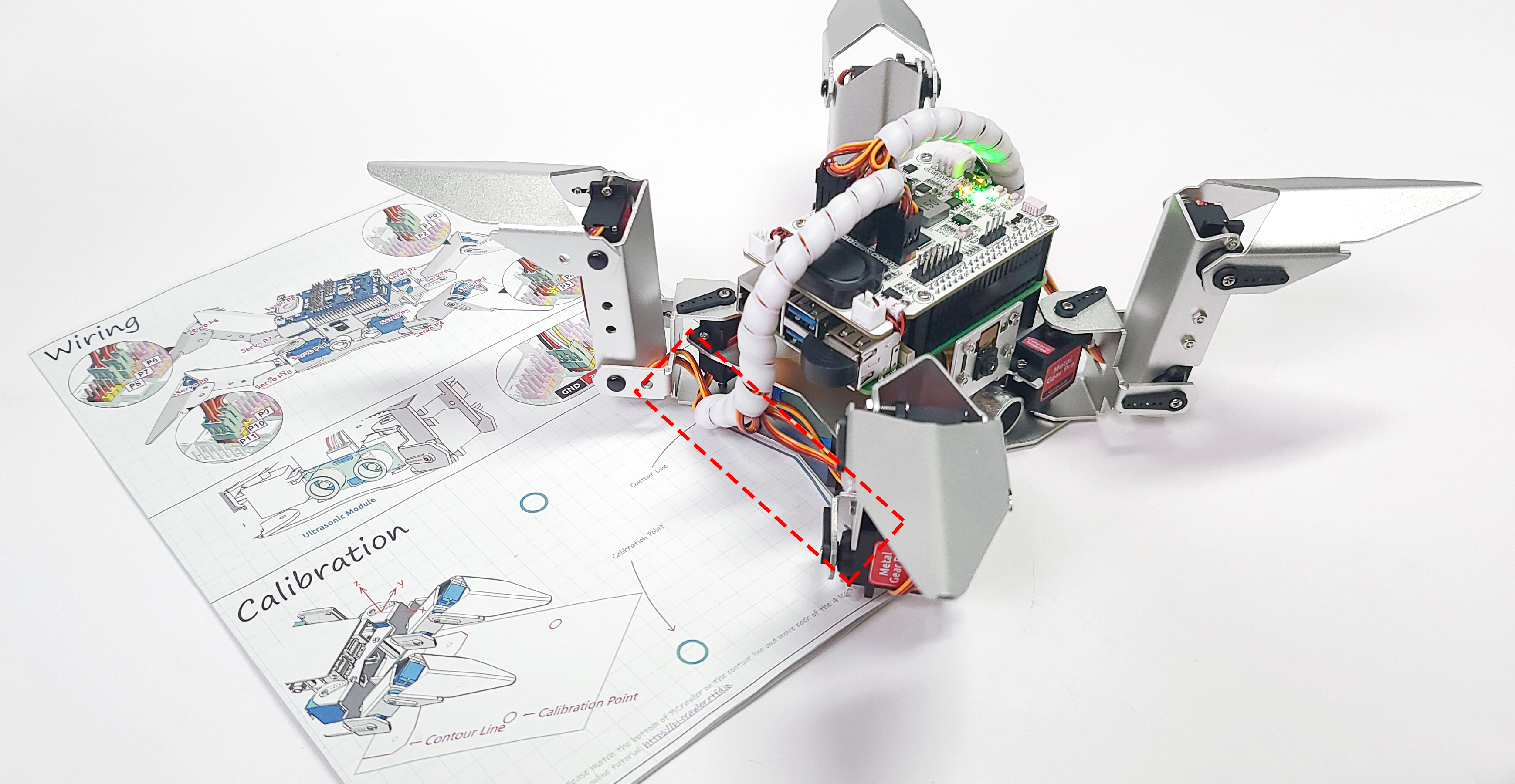
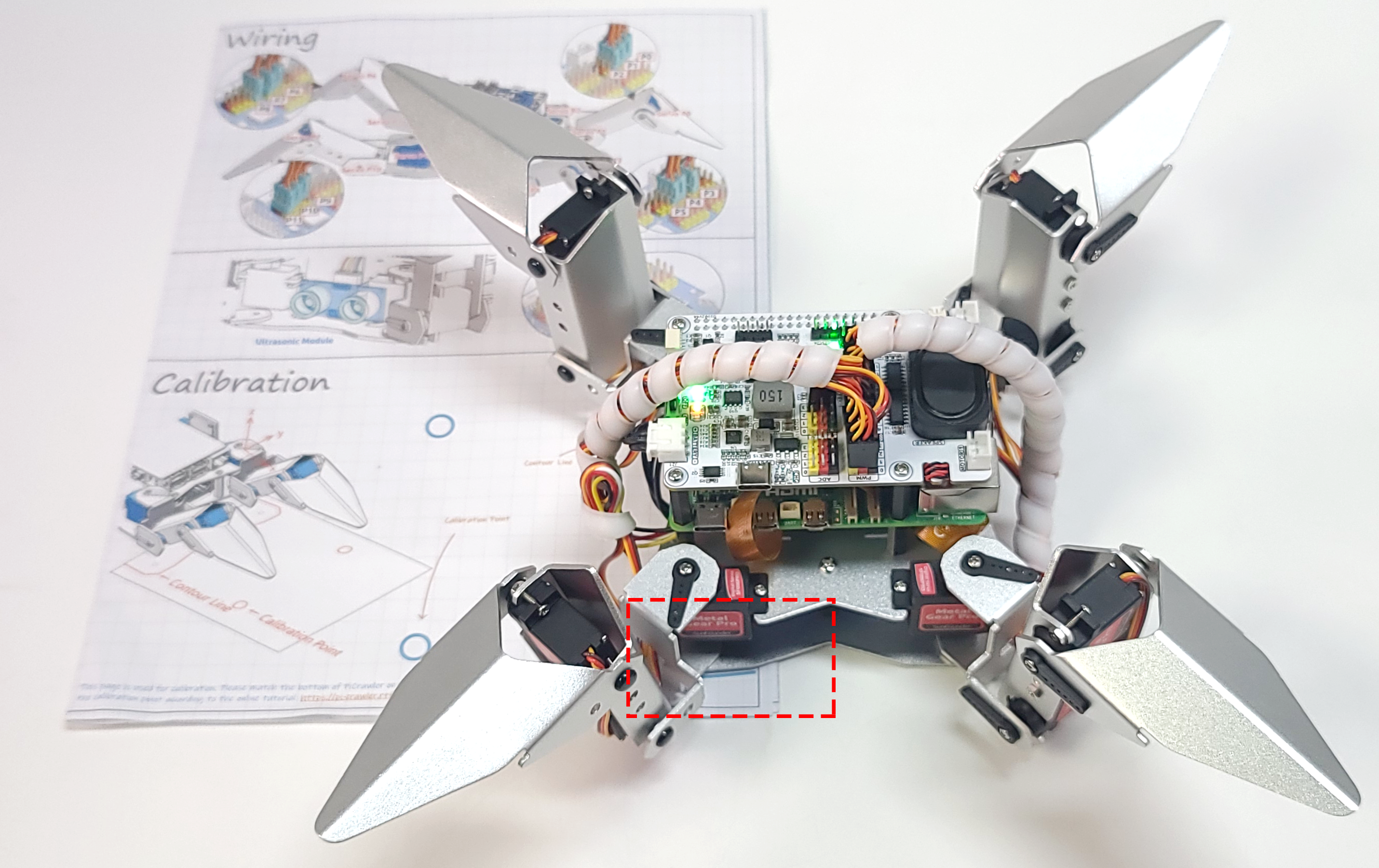
取出装配说明书,翻到最后一页并平放在桌面上。然后将 PiCrawler 按下图所示放置,使其底部与校准图上的轮廓对齐。
运行
calibration.py。cd ~/picrawler/examples sudo python3 0_calibration.py
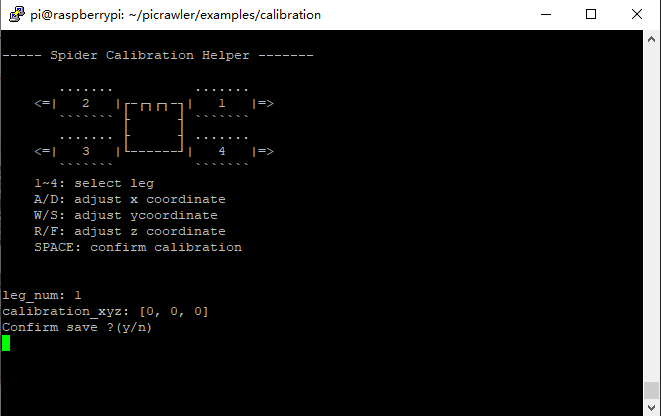
运行上述代码后,你将在终端中看到如下界面。
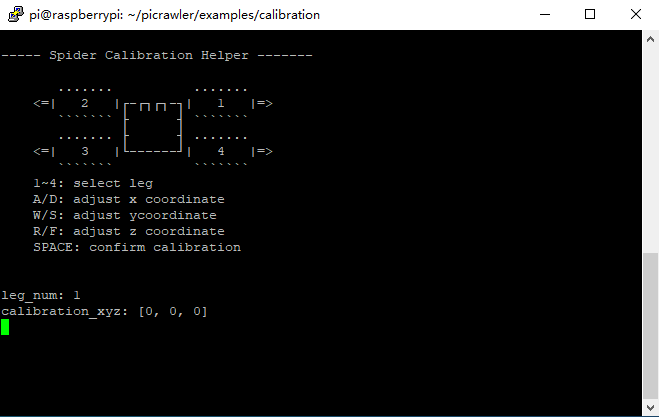
分别按下
2和3键选择左侧两条腿,然后使用w、a、s、d、r和f键将它们移动到校准点。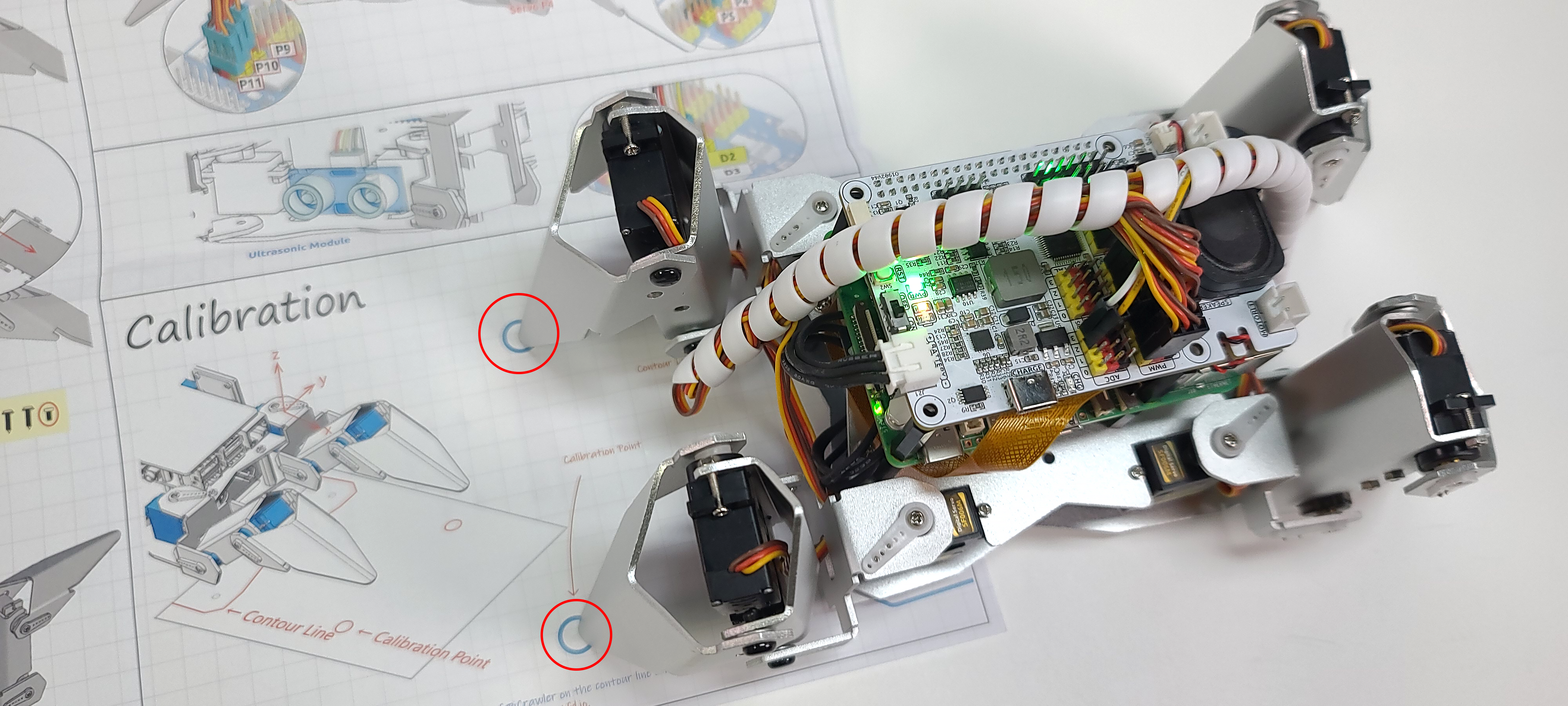
接着,将校准纸移到右侧,并按下
1和4键选择右侧两条腿,再使用w、a、s、d、r和f键将它们移动到校准点。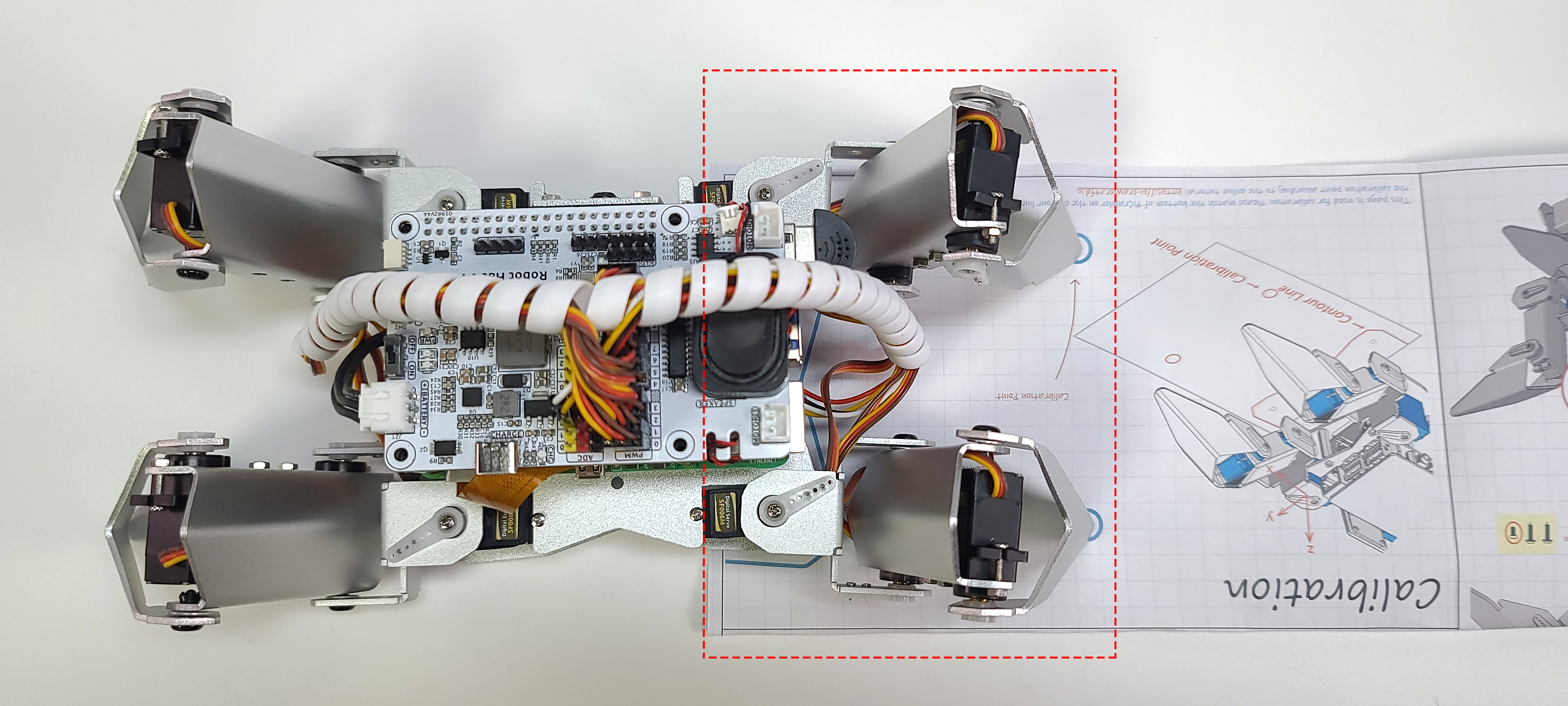
校准完成后,按下
space键保存,此时会提示输入Y进行确认,然后按ctrl+c退出程序,即完成校准。