Nota
Ciao, benvenuto nella Community di SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci il mondo di Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirti a noi?
Supporto Esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato a nuovi annunci di prodotti e anteprime.
Sconti Speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a promozioni e concorsi durante le festività.
👉 Pronto a esplorare e creare con noi? Clicca [qui] e unisciti oggi stesso!
Calibrazione del PiCrawler
A causa di possibili deviazioni durante l’installazione del PiCrawler o delle limitazioni intrinseche dei servomotori, alcuni angoli dei servo potrebbero risultare leggermente inclinati. È quindi possibile calibrarli.
Naturalmente, puoi saltare questo capitolo se ritieni che l’assemblaggio sia perfetto e non necessiti di calibrazione.
I passaggi specifici sono i seguenti:
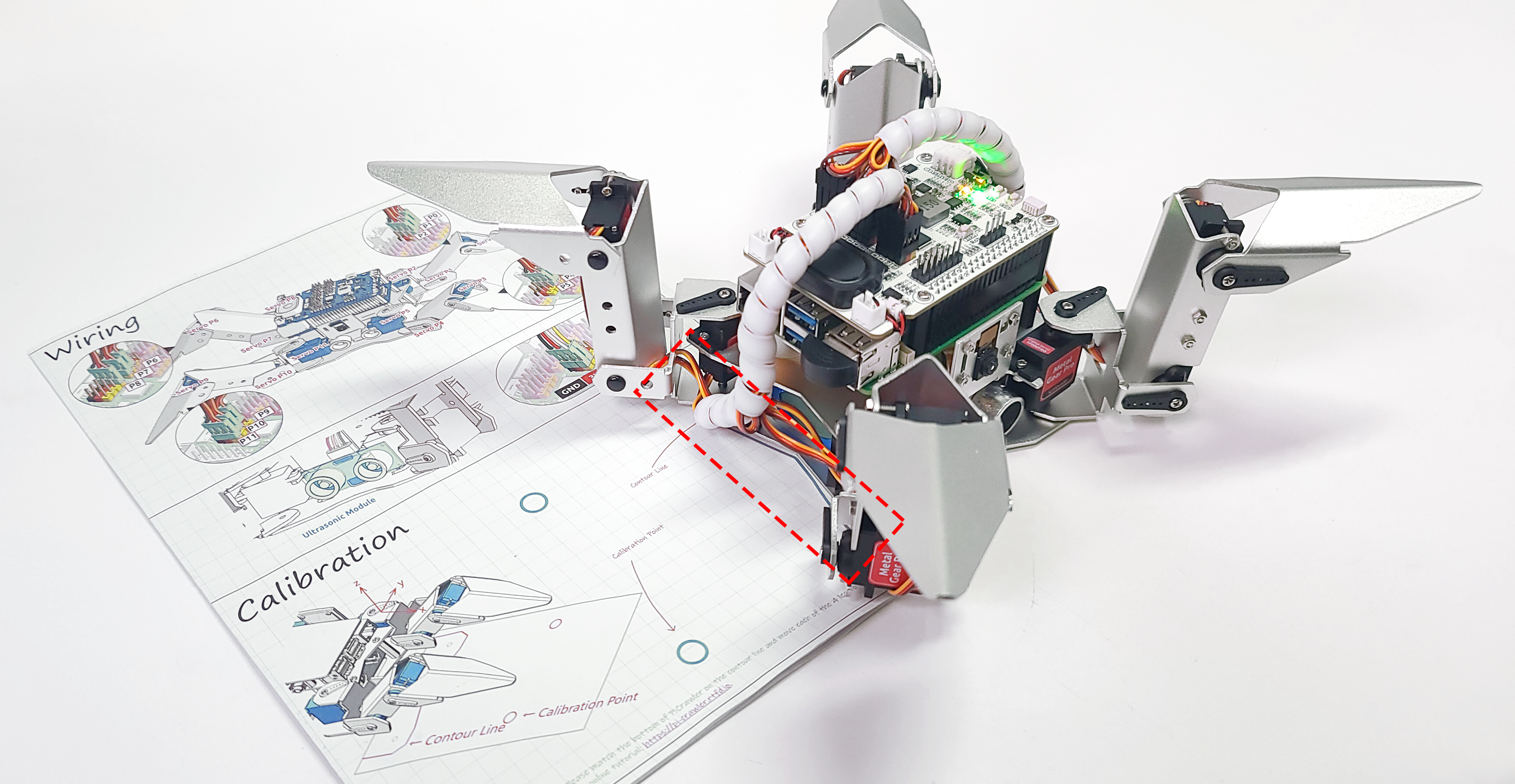
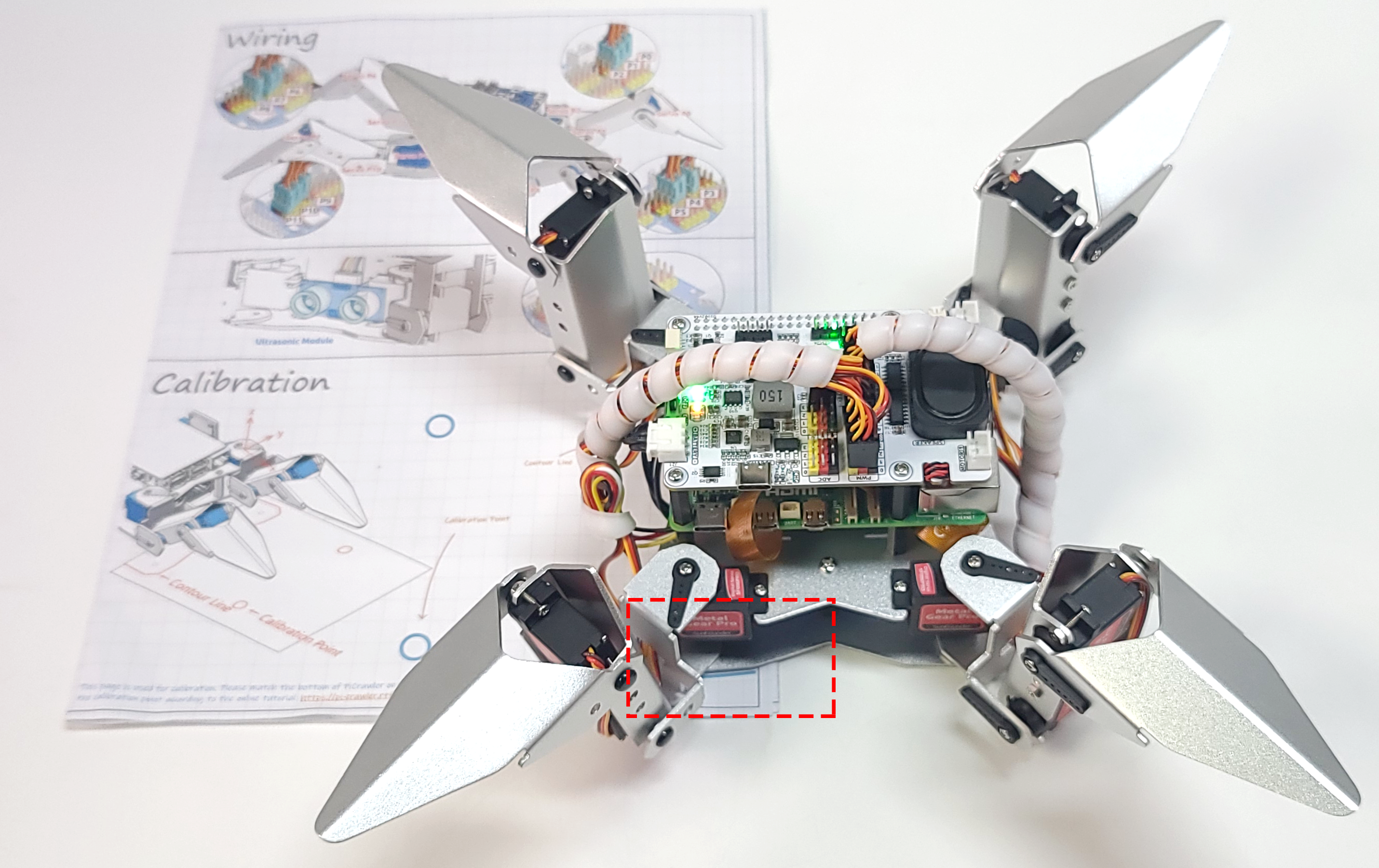
Prendi il foglio di istruzioni per l’assemblaggio, giralo all’ultima pagina e posizionalo piatto sul tavolo. Quindi colloca il PiCrawler come mostrato di seguito, allineando la base con il contorno sulla scheda di calibrazione.
Esegui il file
calibration.py.cd ~/picrawler/examples/calibration sudo python3 calibration.py
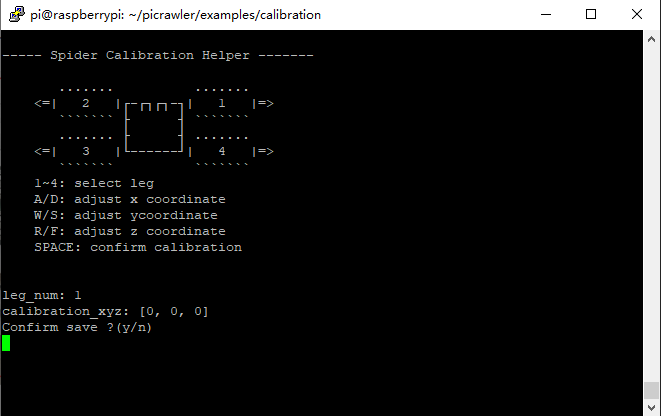
Dopo aver eseguito il codice sopra, vedrai la seguente interfaccia visualizzata nel terminale.
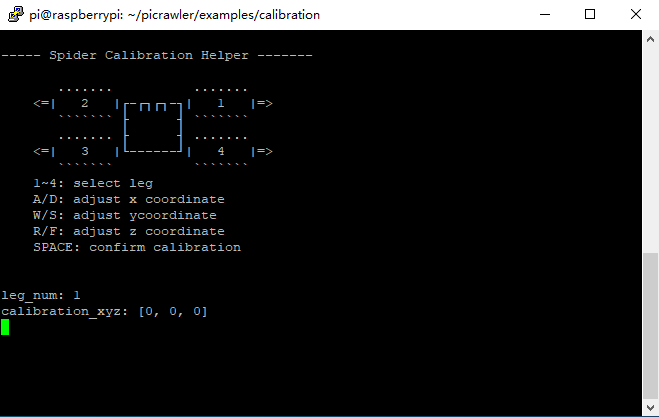
Premi rispettivamente i tasti
2e3per selezionare le due gambe sinistre, poi usa i tastiw,a,s,d,r, efper spostarle verso il punto di calibrazione.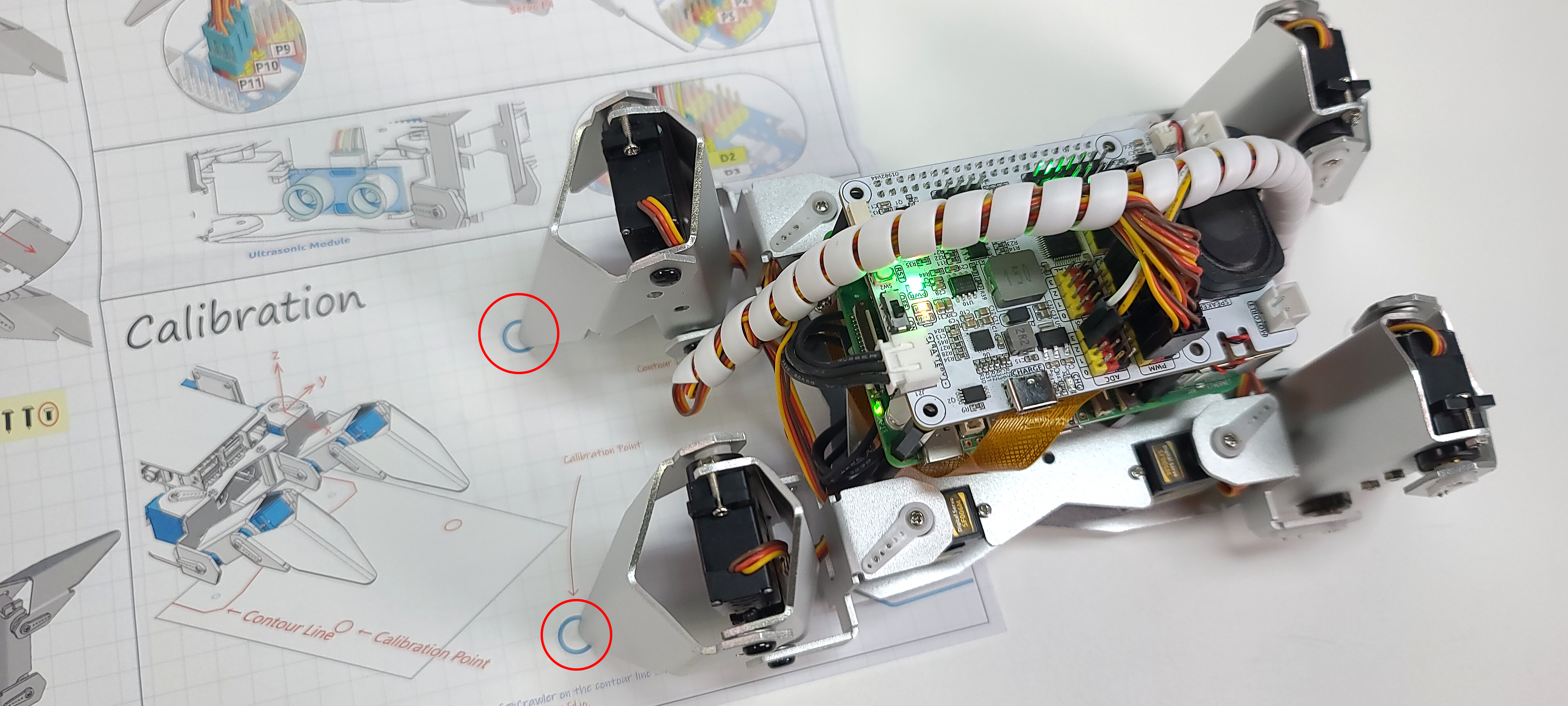
Ora, sposta la carta di calibrazione a destra e premi i tasti
1e4per selezionare le due gambe destre, quindi usa i tastiw,a,s,d,r, efper spostarle verso il punto di calibrazione.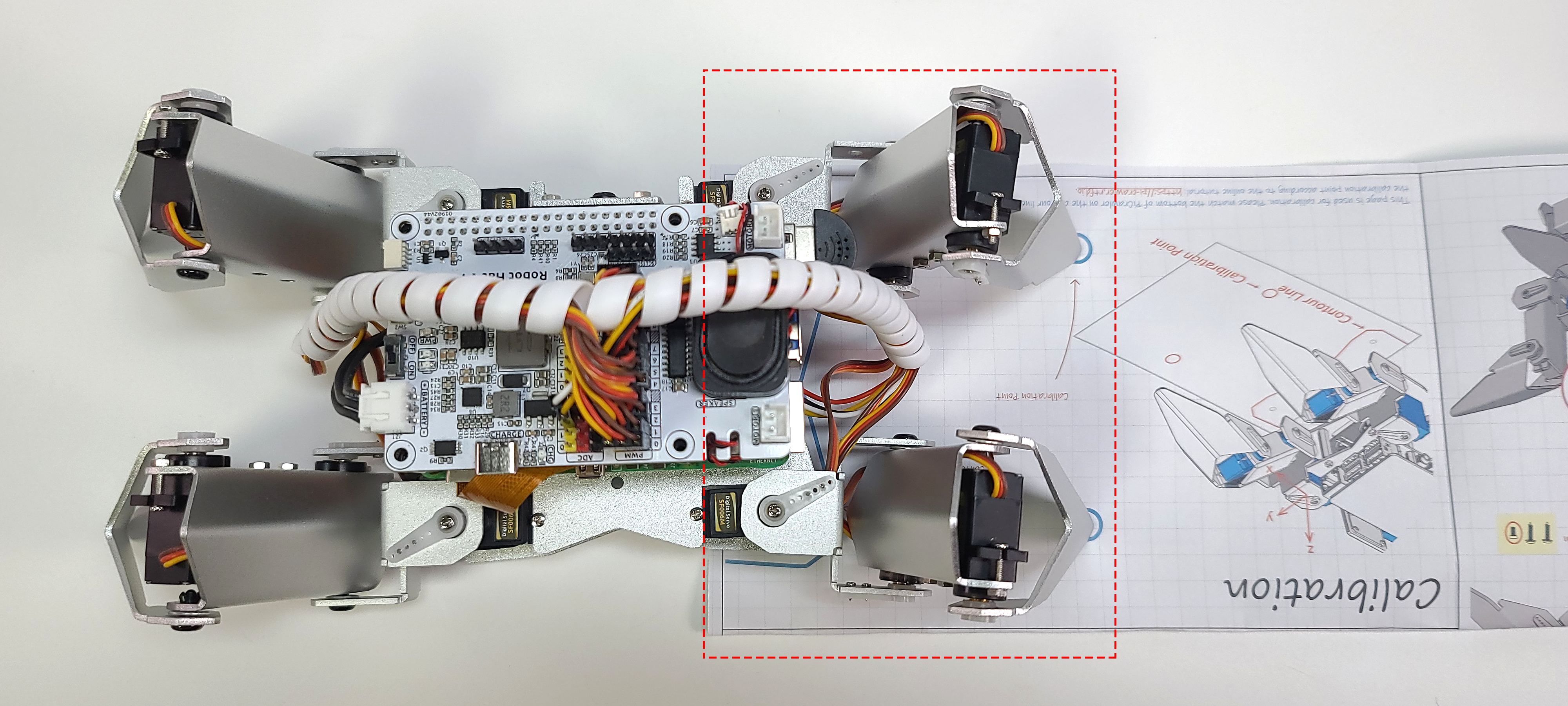
Dopo aver completato la calibrazione, premi il tasto
spazioper salvare; ti verrà chiesto di inserireYper confermare, e successivamente di premerectrl+cper uscire dal programma e completare la calibrazione.