Nota
Ciao, benvenuto nella Community di SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci il mondo di Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirti a noi?
Supporto Esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato a nuovi annunci di prodotti e anteprime.
Sconti Speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a promozioni e concorsi durante le festività.
👉 Pronto a esplorare e creare con noi? Clicca [qui] e unisciti oggi stesso!
Regolazione del Servo (Importante)
Nota
Se il tuo Robot HAT è versione V44 o superiore (con l’altoparlante situato nella parte superiore della scheda) e include un pulsante Zero integrato, puoi saltare questo passaggio e semplicemente premere il pulsante Zero per attivare il programma di azzeramento del servo.

L’intervallo di angolazione del servo è compreso tra -90° e 90°, ma l’angolazione impostata in fabbrica è casuale, potrebbe essere 0° o 45°. Se assembliamo il servo con un angolo casuale, il robot potrebbe comportarsi in modo caotico durante l’esecuzione del codice, o peggio, il servo potrebbe bloccarsi e danneggiarsi.
Pertanto, dobbiamo impostare tutti gli angoli del servo a 0° prima dell’assemblaggio, garantendo che l’angolo del servo sia in posizione centrale, indipendentemente dalla direzione in cui ruota.
Per garantire che il servo sia stato correttamente impostato su 0°, inserisci prima il braccio del servo sull’albero del servo, quindi ruota delicatamente il braccio per osservare il movimento. Questo serve solo per verificare che il servo ruoti correttamente.

Ora, esegui
servo_zeroing.pynella cartellaexamples/.cd ~/picrawler/examples sudo python3 servo_zeroing.py
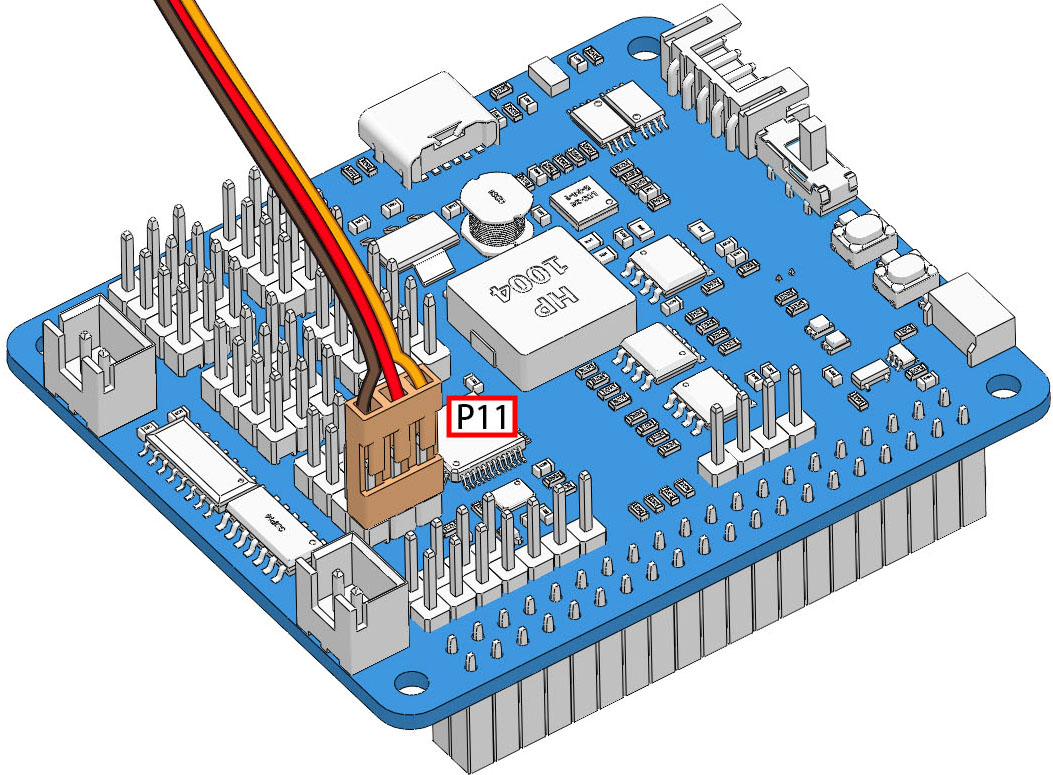
Successivamente, collega il cavo del servo alla porta P11 come mostrato. Contemporaneamente, vedrai il braccio del servo ruotare in una posizione (questa è la posizione di 0°, che potrebbe non essere necessariamente verticale o parallela).
Rimuovi il braccio del servo, assicurandoti che il cavo rimanga collegato, e non spegnere l’alimentazione. Continua quindi l’assemblaggio seguendo le istruzioni cartacee.
Nota
Non scollegare il cavo del servo prima di fissarlo con la vite del servo; puoi scollegarlo dopo averlo fissato.
Non ruotare il servo mentre è alimentato per evitare danni; se l’albero del servo non è inserito nell’angolazione corretta, estrai il servo e reinseriscilo.
Prima di assemblare ciascun servo, è necessario collegare il cavo del servo al pin PWM e accendere l’alimentazione per impostare l’angolo a 0°.