21. Controlar PiCrawler con OpenClaw
¿Qué es OpenClaw?
Piense en ello como una versión mejorada de ChatGPT. Mientras que los chatbots tradicionales solo pueden hablar (generar texto), OpenClaw puede actuar. Entiende sus instrucciones en lenguaje natural y puede realizar operaciones en su computadora, como ejecutar comandos, gestionar archivos y llamar a varias herramientas.
Aquí hay algunos escenarios de aplicación fantásticos:
Asistente personal todo en uno: Deje que gestione su agenda, establezca recordatorios y haga seguimiento de tareas. Solo necesita decírselo en una app de chat (como Telegram, WhatsApp), y lo recordará y ejecutará.
«Pegamento» de automatización: Puede actuar como un aglutinante para sus diversos servicios. Por ejemplo, puede hacer que supervise un sitio web en busca de cambios de precio. Una vez detectada una bajada de precio, puede activar automáticamente un flujo de trabajo de automatización n8n para enviarle una notificación por correo electrónico.
Asistente de desarrollo dedicado: Haga que gestione servidores, ejecute scripts y revise registros. Puede simplemente decir: «Comprueba la carga del sistema», y puede conectarse por SSH a su servidor, ejecutar el comando y devolver los resultados.
«Compañero de juegos» de hardware: Este es un caso de uso muy interesante. Puede hacer que OpenClaw controle hardware conectado a un Raspberry Pi. Por ejemplo, un desarrollador lo usó para controlar un robot aspirador con un brazo mecánico, o incluso para analizar datos de simulador de carreras y mostrarlos en una pantalla LED. ¡El equipo oficial de Raspberry Pi incluso lo usó para construir un fotomatón automático para una boda, solo mediante conversación, sin escribir una sola línea de código!
Importante
El Raspberry Pi Zero 2W tiene solo 512 MB de RAM, mientras que OpenClaw requiere un mínimo de 1 GB. Por lo tanto, no puede ejecutarse correctamente. Se recomienda un Raspberry Pi 4/5 o superior.
Inicio rápido de OpenClaw
Si desea experimentar la potencia de OpenClaw lo más rápido posible, use este método. Instalará automáticamente OpenClaw y lanzará un asistente de configuración interactivo.
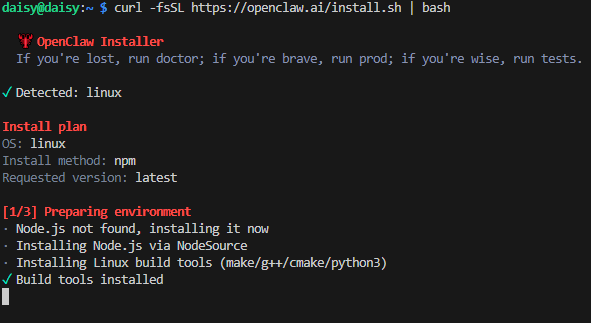
Abra la terminal en su Raspberry Pi y ejecute el siguiente comando directamente. Este comando descarga el script de instalación del sitio web oficial y lo ejecuta:
curl -fsSL https://openclaw.ai/install.sh | bash
Nota
Debido a que las nuevas versiones se actualizan rápidamente, es normal que sus pasos de instalación difieran ligeramente.
El script descargará e instalará automáticamente OpenClaw.
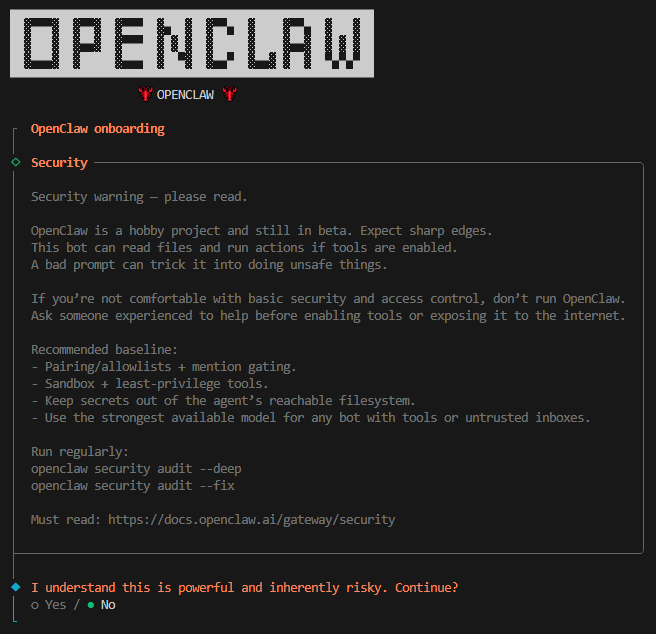
Luego verá una solicitud de seguridad preguntando si confía en OpenClaw. Una vez que esté seguro de que es seguro y fiable, use las teclas de flecha para navegar a «Yes» y presione Enter.
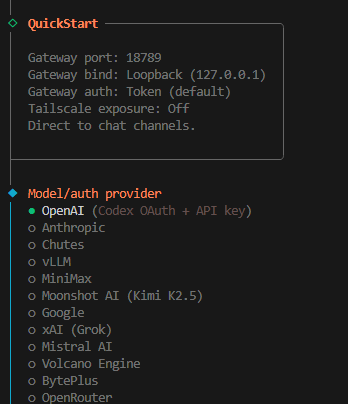
Seleccione Quick Start, luego presione Enter.

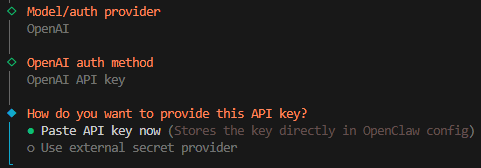
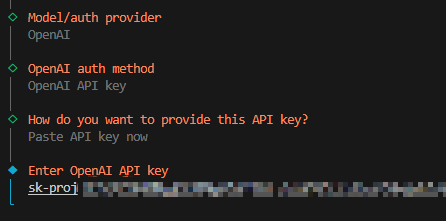
Seleccione su modelo, luego presione Enter. Aquí usamos OpenAI como ejemplo.
Seleccione OpenAI API Key.
Pegue ahora la clave API.
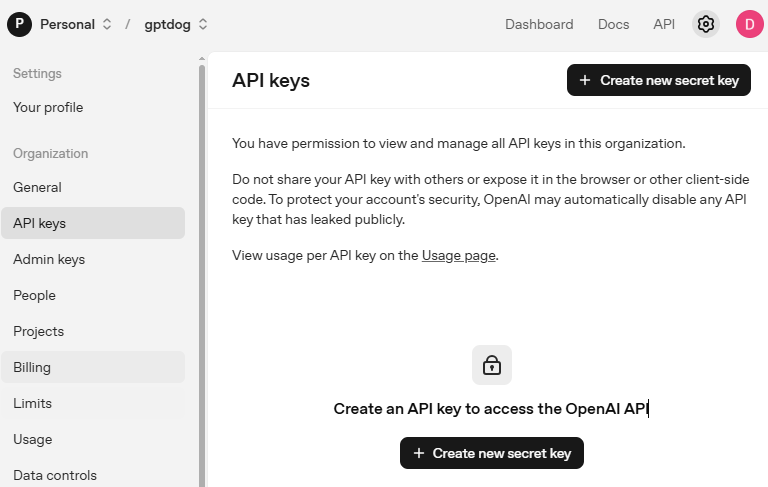
Vaya a Plataforma de OpenAI e inicie sesión. En la página API keys, haga clic en Create new secret key.
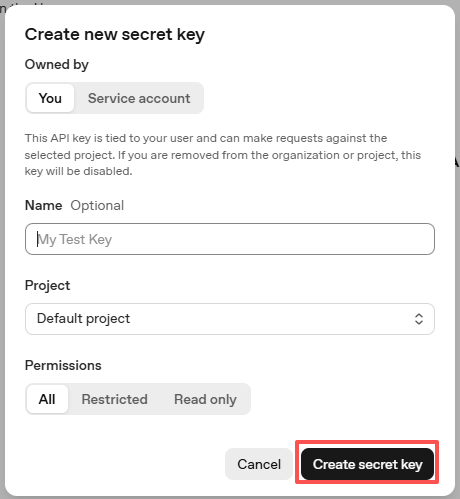
Complete los detalles (Owner, Name, Project y permisos si es necesario), luego haga clic en Create secret key.
Una vez creada la clave, cópiela inmediatamente — no podrá verla de nuevo. Si la pierde, deberá generar una nueva.
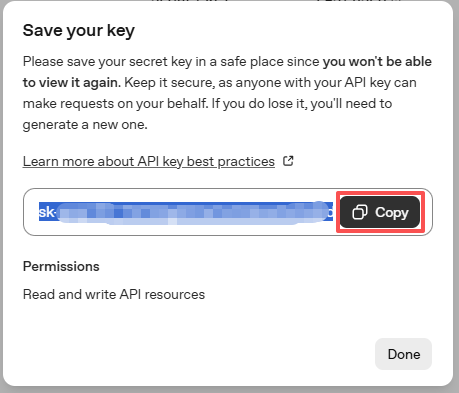
Pegue la clave en la configuración de OpenClaw.
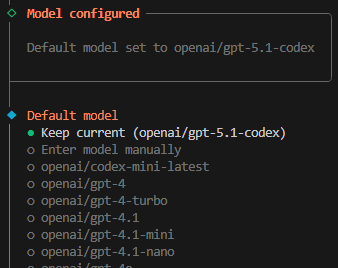
Seleccione el modelo que desea usar. En este ejemplo, usaremos Keep current.
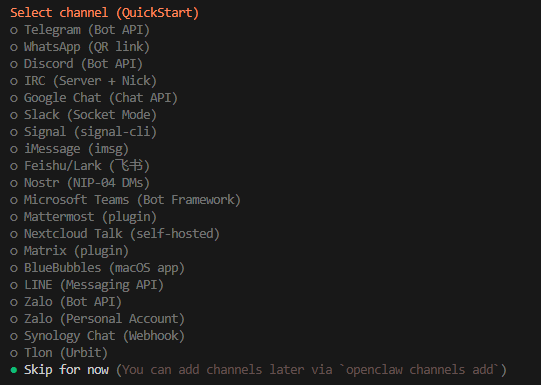
A continuación viene la selección de canales. Los canales se refieren a los servicios de comunicación compatibles con OpenClaw, como Telegram, WhatsApp, Discord y más. Use la tecla de flecha hacia abajo para seleccionar la opción «Skip for now», luego presione Enter.
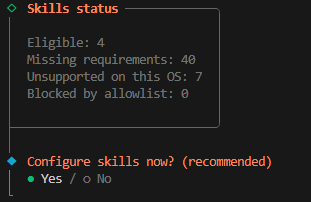
A continuación, se le pedirá que configure skills inmediatamente. Seleccione «Yes» y presione Enter.
Instale los skills que necesite. En el siguiente ejemplo, seleccionamos la opción «Skip for now» (presione la barra espaciadora para seleccionar), luego presione Enter.
A continuación vienen los Hooks; seleccionaremos «command-logger» y «session-memory».
La instalación está completa. Puede iniciar OpenClaw seleccionando «Hatch in TUI» y presionando Enter.
Nota
Puede iniciar OpenClaw ingresando el siguiente comando:
openclaw tui
Y puede presionar Ctrl+C dos veces para salir de la interfaz TUI.
Hacer que OpenClaw opere el PiCrawler
¿Qué es PiCrawler Skill?
PiCrawler Skill es una extensión para OpenClaw que le permite controlar su robot araña SunFounder PiCrawler mediante lenguaje natural. En lugar de escribir scripts de Python o recordar valores de coordenadas, puede simplemente decirle a OpenClaw lo que quiere que PiCrawler haga — como «levántate», «camina tres pasos hacia adelante» o «comprueba si hay un obstáculo delante» — y OpenClaw ejecutará automáticamente el código Python apropiado.
Aquí hay algunas cosas que puede hacer con PiCrawler Skill:
Movimientos básicos: Caminar hacia adelante, hacia atrás, girar a la izquierda/derecha, giros de ángulo pequeño
Posturas: Levantarse, sentarse
Acciones expresivas: Saludar con una pata delantera, bailar, hacer flexiones, mirar en diferentes direcciones
Sensores: Leer el sensor de distancia ultrasónico para detectar obstáculos
Sonido: Reproducir efectos de sonido y música a través del altavoz del robot
Visión por cámara: Tomar fotos, detectar rostros, rastrear colores, reconocer códigos QR y gestos
Requisitos previos
Antes de poder usar PiCrawler Skill con OpenClaw, asegúrese de tener:
PiCrawler correctamente ensamblado y conectado a su Raspberry Pi
OpenClaw instalado y en funcionamiento
Las siguientes bibliotecas de Python instaladas:
picrawlerrobot_hatvilib
Puede verificar la instalación ejecutando:
python3 -c "import picrawler"
Si este comando se ejecuta sin errores, está listo para continuar.
Instalar PiCrawler Skill
Siga estos pasos para instalar el PiCrawler Skill para OpenClaw:
Copie los archivos del skill PiCrawler al directorio de skills de OpenClaw:
cp -r ~/picrawler/picrawler-control ~/.openclaw/workspace/skills/
Verifique la instalación comprobando los archivos del skill:
ls ~/.openclaw/workspace/skills/picrawler-control/Debería ver
SKILL.md,install.sh,scripts/yreferences/en la salida.
El archivo SKILL.md del skill contiene todas las instrucciones que
OpenClaw necesita — reglas de seguridad, plantillas de código para cada
capacidad y un mapeo de solicitudes en lenguaje natural a código Python.
OpenClaw lee este archivo y lo usa para decidir qué código ejecutar en su
PiCrawler.
Probar PiCrawler Skill desde la CLI
Antes de usar el skill con OpenClaw, puede probar la funcionalidad básica directamente desde la terminal usando la herramienta CLI incluida.
Comprobar distancia ultrasónica:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py sensor distance
Hacer que PiCrawler se siente:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py pose sit --speed 40
Hacer que PiCrawler se levante:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py pose stand --speed 40
Caminar hacia adelante:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py move forward --steps 2 --speed 60
Girar a la izquierda:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py move "turn left" --steps 1 --speed 60
Reproducir un efecto de sonido:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py sound play /home/pi/picrawler/examples/sounds/talk1.wav --volume 80
Ejecutar calibración de servos:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py calibrate
Usar PiCrawler Skill en OpenClaw
Una vez que haya verificado que PiCrawler Skill funciona desde la línea de comandos, puede comenzar a usarlo dentro de OpenClaw.
Iniciar OpenClaw TUI:
openclaw tuiEnvíe comandos en lenguaje natural para controlar PiCrawler. Aquí hay algunos ejemplos:
«Stand up»
«Sit down»
«Walk forward three steps»
«Turn left»
«Do a dance»
«Do some push-ups»
«Wave your front leg»
«Look to the left»
«Check if there’s something ahead»
«Take a photo»
«Detect faces / look at me»
«Find the color red»
OpenClaw traducirá automáticamente su solicitud al código Python apropiado y lo ejecutará en PiCrawler. Para comandos de movimiento, el skill siempre asegura que el robot se levante primero y se siente después de completar la acción.
Acciones y comandos disponibles
Aquí está la lista completa de capacidades soportadas por PiCrawler Skill:
Movimientos (pc.py move)
Acción |
Descripción |
|---|---|
|
Caminar hacia adelante |
|
Caminar hacia atrás |
|
Girar a la izquierda en el lugar |
|
Girar a la derecha en el lugar |
|
Giro de ángulo pequeño a la izquierda |
|
Giro de ángulo pequeño a la derecha |
Posturas (pc.py pose)
Postura |
Descripción |
|---|---|
|
Levantarse de la posición sentada |
|
Sentarse de la posición de pie |
Acciones adicionales (vía lenguaje natural / exec)
Acción |
Descripción |
|---|---|
|
Realizar un movimiento de baile |
|
Hacer flexiones |
|
Saludar con una pata delantera |
|
Girar el cuerpo para mirar a la izquierda |
|
Girar el cuerpo para mirar a la derecha |
|
Inclinar el cuerpo para mirar arriba |
|
Inclinar el cuerpo para mirar abajo |
Sensores
Comando |
Descripción |
|---|---|
|
Leer el sensor de distancia ultrasónico (devuelve cm) |
Sonido (pc.py sound)
Comando |
Descripción |
|---|---|
|
Reproducir un archivo de efecto de sonido |
|
Reproducir música de fondo |
|
Ajustar el volumen del altavoz |
|
Detener la reproducción |
Cámara y visión (vía lenguaje natural / exec)
Capacidad |
Descripción |
|---|---|
Tomar foto |
Capturar y guardar una foto en |
Detección de rostros |
Detectar rostros humanos e informar la posición |
Detección de color |
Localizar objetos por color (rojo, azul, verde, etc.) |
Reconocimiento de gestos |
Reconocer gestos de piedra/papel/tijera |
Detección de señales de tráfico |
Reconocer señales de stop/izquierda/derecha/adelante |
Escaneo de códigos QR |
Leer datos y posición de códigos QR |
Solución de problemas
Problemas de OpenClaw
P: Durante la instalación, obtengo el error Error: systemctl is-enabled unavailable: Command failed: systemctl --user is-enabled openclaw-gateway.service. ¿Qué debo hacer?
Puede ignorar esto por ahora, pero podría encontrar problemas en los siguientes pasos. Consúltelos uno por uno en ese momento.
P: Cuando ejecuto openclaw tui, obtengo el error -bash: openclaw: command not found. ¿Qué debo hacer?
Ejecute el siguiente comando:
echo 'export PATH="$HOME/.npm-global/bin:$PATH"' >> ~/.bashrc source ~/.bashrcAhora debería poder iniciar la interfaz TUI con
openclaw tui.
P: En openclaw tui, encuentro not connected to gateway — message not sent o el mensaje gateway disconnected: closed.
Esto se debe a que su servicio OpenClaw Gateway no está iniciado. Abra otra terminal y ejecute el siguiente comando para iniciar el OpenClaw Gateway:
openclaw gatewayLuego reinicie
openclaw tui, y podrá usarlo directamente.
P: Quiero configurar el servicio OpenClaw Gateway para que se ejecute en segundo plano / se inicie automáticamente al arrancar. ¿Cómo lo hago?
Normalmente, su servicio OpenClaw Gateway debería iniciarse automáticamente al arrancar. Si no lo hace, puede iniciarlo manualmente con el siguiente comando.
Cree el directorio
~/.config/systemd/user:mkdir -p ~/.config/systemd/user
Cree el archivo
openclaw-gateway.service:cat > ~/.config/systemd/user/openclaw-gateway.service << EOF [Unit] Description=OpenClaw Gateway After=network.target [Service] Type=simple ExecStart=$HOME/.npm-global/bin/openclaw gateway run Restart=on-failure RestartSec=10 Environment="PATH=$HOME/.npm-global/bin:/usr/local/bin:/usr/bin:/bin:/usr/sbin" Environment="NODE_ENV=production" [Install] WantedBy=default.target EOF
Luego recargue la configuración de systemd:
systemctl --user daemon-reload
Inicie el servicio:
systemctl --user start openclaw-gatewayEn este punto, reinicie
openclaw tui, y podrá usarlo directamente.
Actívelo para que se inicie al arrancar:
systemctl --user enable openclaw-gateway
P: Mi OpenClaw no puede operar el sistema, ¿qué debo hacer?
Un OpenClaw recién instalado puede no tener permiso para operar su sistema Raspberry Pi por defecto; solo puede chatear. Necesitamos configurar manualmente los permisos.
Abra el archivo de configuración de OpenClaw:
nano ~/.openclaw/openclaw.json
Encuentre la opción
toolsy cambieprofileyexeccomo se muestra."tools": { "profile": "coding", "exec": { "secrity": "full" } },
Guarde y salga.
Ingrese el siguiente comando en la terminal para reiniciar el OpenClaw Gateway:
openclaw gateway restartAhora, OpenClaw debería tener permisos de lectura y escritura y poder operar su sistema Raspberry Pi.
Problemas de PiCrawler
P: PiCrawler no responde a los comandos. ¿Qué debo hacer?
Primero, verifique que PiCrawler esté correctamente conectado y encendido. Luego pruebe la funcionalidad básica:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py pose sit --speed 40Si esto falla, asegúrese de que las bibliotecas Python requeridas estén instaladas:
python3 -c "import picrawler; import robot_hat; import vilib"
P: La prueba import picrawler falla.
Esto significa que la biblioteca Python de PiCrawler no está correctamente instalada. Consulte la guía de instalación oficial de PiCrawler para instalar las bibliotecas necesarias. También puede ejecutar el script de instalación incluido:
bash ~/.openclaw/workspace/skills/picrawler-control/install.sh
P: OpenClaw no reconoce el skill de PiCrawler.
Recuerde a OpenClaw que sincronice los skills diciendo en el TUI: «Please rsync my skills» o reinicie el OpenClaw Gateway:
openclaw gateway restart
P: Los movimientos de PiCrawler parecen inestables o bruscos.
Esto generalmente se debe a ejecutar acciones a una velocidad demasiado alta o sin permitir que la acción anterior se complete. El skill aplica reglas de seguridad (levantarse antes de moverse, sentarse después del movimiento) y recomienda rangos de velocidad. Intente reducir el parámetro de velocidad (por ejemplo,
--speed 40), o agregue pequeñas pausas entre comandos consecutivos.