Note
Bonjour et bienvenue dans la communauté SunFounder pour les passionnés de Raspberry Pi, Arduino et ESP32 sur Facebook ! Plongez dans l’univers de Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez vos problèmes après-vente et vos défis techniques grâce à l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des astuces et des tutoriels pour perfectionner vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus exclusifs.
Réductions spéciales : Profitez de réductions exclusives sur nos nouveaux produits.
Promotions festives et concours : Participez à des concours et des promotions spéciales pendant les fêtes.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [Ici] et rejoignez-nous dès aujourd’hui !
3.1.4 Ventilateur intelligent
Note
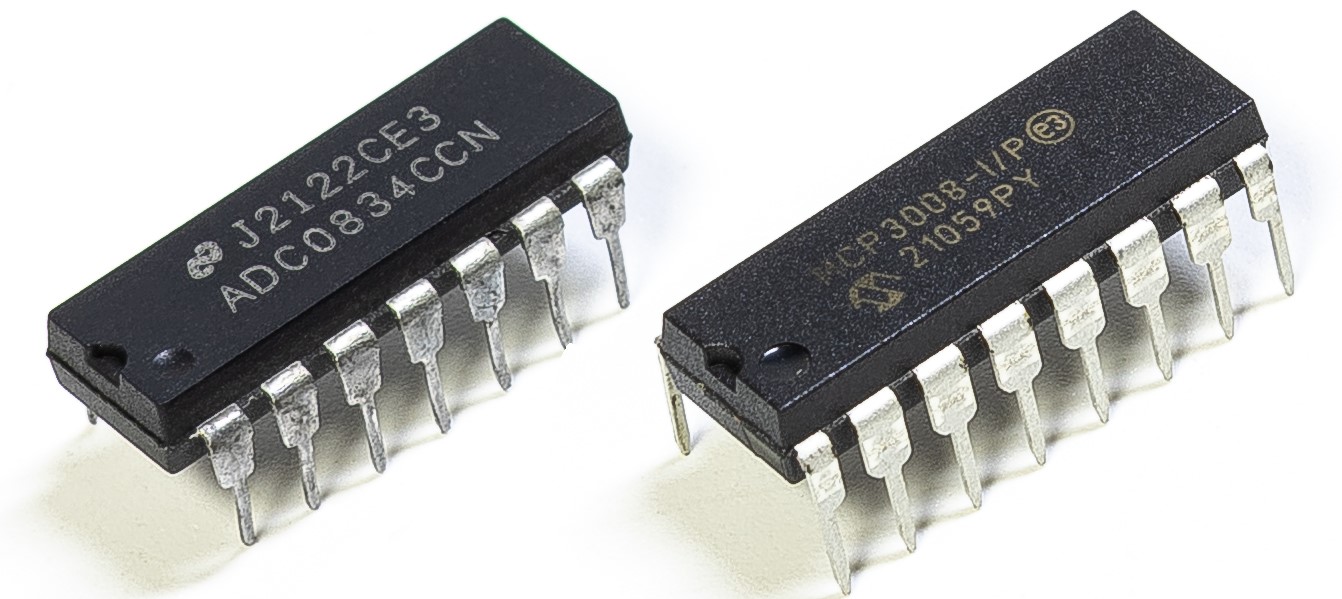
Selon la version de votre kit, identifiez si vous disposez du ADC0834 ou du MCP3008 et suivez la section correspondante.
Introduction
Dans ce cours, nous allons utiliser des moteurs, des boutons et des thermistances pour créer un ventilateur intelligent manuel + automatique dont la vitesse de ventilation est réglable.
Composants

Schéma de câblage
T-Board Name |
physical |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |

Procédures expérimentales
Étape 1 : Montez le circuit.

Note
Le module d’alimentation peut utiliser une batterie de 9V avec le clip de batterie 9V fourni dans le kit. Insérez le cavalier du module d’alimentation dans les bandes de bus 5V de la breadboard.

Pour les utilisateurs du langage C
Étape 2 : Accédez au dossier du code.
cd ~/davinci-kit-for-raspberry-pi/c/3.1.4/
Étape 3 : Compilez.
gcc 3.1.4_SmartFan.c -lwiringPi -lm
Étape 4 : Exécutez le fichier exécutable ci-dessus.
sudo ./a.out
Lorsque le code s’exécute, démarrez le ventilateur en appuyant sur le bouton. Chaque pression ajuste la vitesse d’un cran vers le haut ou vers le bas. Il y a 5 niveaux de vitesse : 0~4. Lorsque la vitesse atteint le 4:sup:`ème` niveau et que vous appuyez de nouveau, le ventilateur s’arrête avec une vitesse de 0.
Note
Si cela ne fonctionne pas après l’exécution ou si un message d’erreur apparaît : "wiringPi.h: Aucun fichier ou dossier de ce type », veuillez vous référer à Le code C ne fonctionne pas ?.
Une variation de température supérieure ou inférieure à 2℃ entraîne automatiquement une augmentation ou une diminution d’un cran de la vitesse.
Explication du code
int temperture(){
unsigned char analogVal;
double Vr, Rt, temp, cel, Fah;
analogVal = get_ADC_Result(0);
Vr = 5 * (double)(analogVal) / 255;
Rt = 10000 * (double)(Vr) / (5 - (double)(Vr));
temp = 1 / (((log(Rt/10000)) / 3950)+(1 / (273.15 + 25)));
cel = temp - 273.15;
Fah = cel * 1.8 +32;
int t=cel;
return t;
}
La fonction temperture() convertit les valeurs de la thermistance lues par l’ADC0834 en valeurs de température. Pour plus de détails, reportez-vous à 2.2.2 Thermistor.
int motor(int level){
if(level==0){
digitalWrite(MotorEnable,LOW);
return 0;
}
if (level>=4){
level =4;
}
digitalWrite(MotorEnable,HIGH);
softPwmWrite(MotorPin1, level*25);
return level;
}
Cette fonction contrôle la vitesse de rotation du moteur. La plage du niveau : 0-4 (le niveau 0 arrête le moteur). Chaque ajustement de niveau représente un changement de 25% de la vitesse du ventilateur.
int main(void)
{
setup();
int currentState,lastState=0;
int level = 0;
int currentTemp,markTemp=0;
while(1){
currentState=digitalRead(BtnPin);
currentTemp=temperture();
if (currentTemp<=0){continue;}
if (currentState==1&&lastState==0){
level=(level+1)%5;
markTemp=currentTemp;
delay(500);
}
lastState=currentState;
if (level!=0){
if (currentTemp-markTemp<=-2){
level=level-1;
markTemp=currentTemp;
}
if (currentTemp-markTemp>=2){
level=level+1;
markTemp=currentTemp;
}
}
level=motor(level);
}
return 0;
}
La fonction main() contient le processus global du programme :
Lecture constante de l’état du bouton et de la température actuelle.
2) Chaque pression du bouton incrémente le niveau de +1 et met à jour la température. Les niveaux vont de 1 à 4.
3) Tant que le ventilateur fonctionne (niveau différent de 0), la température est surveillée. Un changement de 2℃+ entraîne une augmentation ou une diminution du niveau.
Le moteur ajuste sa vitesse de rotation en fonction du niveau.
Pour les utilisateurs du langage Python
Étape 2 : Accédez au dossier du code.
cd ~/davinci-kit-for-raspberry-pi/python
Étape 3 : Exécutez.
sudo python3 3.1.4_SmartFan.py
Lorsque le code s’exécute, démarrez le ventilateur en appuyant sur le bouton. Chaque pression ajuste la vitesse d’un cran vers le haut ou vers le bas. Il y a 5 niveaux de vitesse : 0~4. Lorsque le ventilateur est réglé sur le 4:sup:`ème` niveau de vitesse et que vous appuyez de nouveau, il s’arrête avec une vitesse de 0.
Une variation de température supérieure ou inférieure à 2℃ entraîne automatiquement une augmentation ou une diminution d’un cran de la vitesse.
Code
Note
Vous pouvez modifier/réinitialiser/copier/exécuter/arrêter le code ci-dessous.
Mais avant cela, vous devez vous rendre sur le chemin du code source comme davinci-kit-for-raspberry-pi/python.
import RPi.GPIO as GPIO
import time
import ADC0834
import math
# Configuration des broches
MotorPin1 = 5
MotorPin2 = 6
MotorEnable = 13
BtnPin = 22
def setup():
global p_M1,p_M2
ADC0834.setup()
GPIO.setmode(GPIO.BCM)
GPIO.setup(MotorPin1, GPIO.OUT)
GPIO.setup(MotorPin2, GPIO.OUT)
p_M1=GPIO.PWM(MotorPin1,2000)
p_M2=GPIO.PWM(MotorPin2,2000)
p_M1.start(0)
p_M2.start(0)
GPIO.setup(MotorEnable, GPIO.OUT, initial=GPIO.LOW)
GPIO.setup(BtnPin, GPIO.IN)
def temperature():
analogVal = ADC0834.getResult()
Vr = 5 * float(analogVal) / 255
Rt = 10000 * Vr / (5 - Vr)
temp = 1/(((math.log(Rt / 10000)) / 3950) + (1 / (273.15+25)))
Cel = temp - 273.15
Fah = Cel * 1.8 + 32
return Cel
def motor(level):
if level == 0:
GPIO.output(MotorEnable, GPIO.LOW)
return 0
if level>=4:
level = 4
GPIO.output(MotorEnable, GPIO.HIGH)
p_M1.ChangeDutyCycle(level*25)
return level
def main():
lastState=0
level=0
markTemp = temperature()
while True:
currentState =GPIO.input(BtnPin)
currentTemp=temperature()
if currentState == 1 and lastState == 0:
level=(level+1)%5
markTemp = currentTemp
time.sleep(0.5)
lastState=currentState
if level!=0:
if currentTemp-markTemp <= -2:
level = level -1
markTemp=currentTemp
if currentTemp-markTemp >= 2:
level = level +1
markTemp=currentTemp
level = motor(level)
def destroy():
GPIO.output(MotorEnable, GPIO.LOW)
p_M1.stop()
p_M2.stop()
GPIO.cleanup()
if __name__ == '__main__':
setup()
try:
main()
except KeyboardInterrupt:
destroy()
Explication du code
def temperature():
analogVal = ADC0834.getResult()
Vr = 5 * float(analogVal) / 255
Rt = 10000 * Vr / (5 - Vr)
temp = 1/(((math.log(Rt / 10000)) / 3950) + (1 / (273.15+25)))
Cel = temp - 273.15
Fah = Cel * 1.8 + 32
return Cel
La fonction temperature() convertit les valeurs de la thermistance lues par ADC0834 en valeurs de température. Pour plus de détails, reportez-vous à 2.2.2 Thermistor.
def motor(level):
if level == 0:
GPIO.output(MotorEnable, GPIO.LOW)
return 0
if level >= 4:
level = 4
GPIO.output(MotorEnable, GPIO.HIGH)
p_M1.ChangeDutyCycle(level * 25)
return level
Cette fonction contrôle la vitesse de rotation du moteur. La plage de niveau : 0-4 (le niveau 0 arrête le moteur). Chaque ajustement de niveau représente un changement de 25% de la vitesse du ventilateur.
def main():
lastState=0
level=0
markTemp = temperature()
while True:
currentState =GPIO.input(BtnPin)
currentTemp=temperature()
if currentState == 1 and lastState == 0:
level=(level+1)%5
markTemp = currentTemp
time.sleep(0.5)
lastState=currentState
if level!=0:
if currentTemp-markTemp <= -2:
level = level -1
markTemp=currentTemp
if currentTemp-markTemp >= 2:
level = level +1
markTemp=currentTemp
level = motor(level)
La fonction main() suit le processus global du programme :
Lecture constante de l’état du bouton et de la température actuelle.
Chaque pression sur le bouton augmente le niveau de +1 et met à jour la température. Les niveaux vont de 1 à 4.
Tant que le ventilateur fonctionne (niveau différent de 0), la température est surveillée. Une variation de 2℃+ entraîne une augmentation ou une diminution du niveau.
Le moteur ajuste sa vitesse de rotation en fonction du niveau.
Image du phénomène
