Nota
¡Hola! Bienvenidos a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte Experto: Resuelve problemas post-venta y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Vistas Exclusivas: Obtén acceso anticipado a anuncios de nuevos productos y adelantos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones Festivas y Sorteos: Participa en sorteos y promociones especiales de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy.
2.1.6 Joystick
Nota
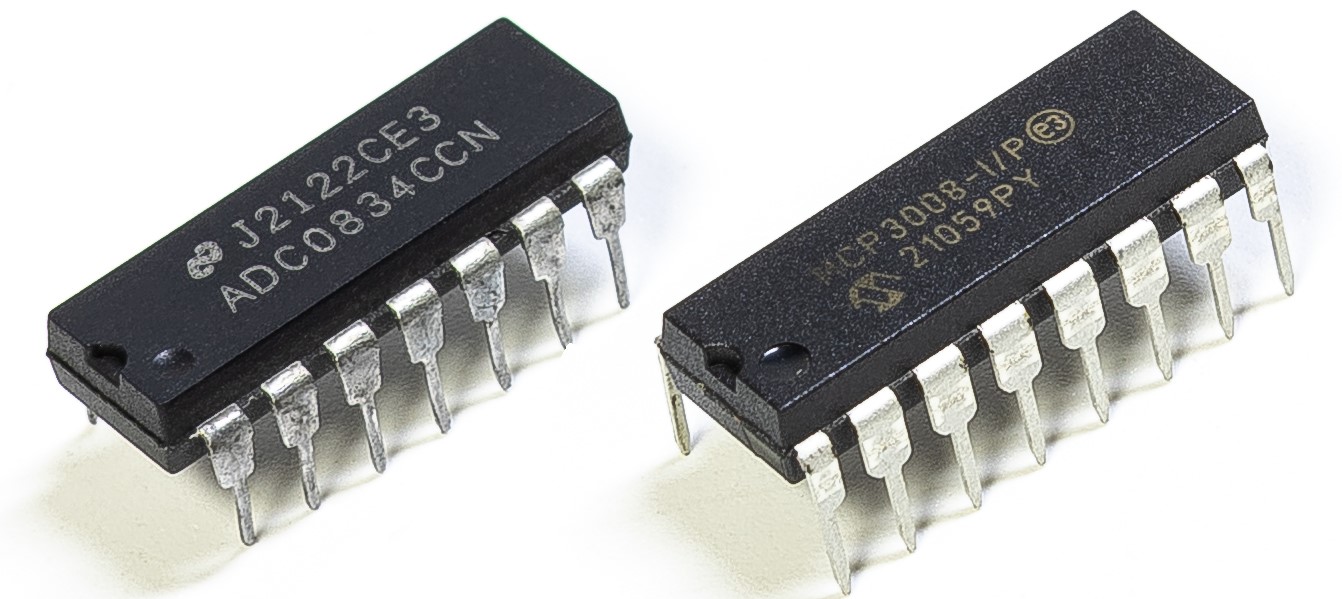
Dependiendo de la versión de tu kit, identifica si tienes ADC0834 o MCP3008 y procede con la sección correspondiente.
Introducción
En este proyecto, aprenderemos cómo funciona el joystick. Manipularemos el joystick y mostraremos los resultados en la pantalla.
Componentes

Principio
Joystick
La idea básica de un joystick es traducir el movimiento de una palanca en información electrónica que una computadora pueda procesar.
Para comunicar un rango completo de movimiento, un joystick necesita medir la posición de la palanca en dos ejes: el eje X (izquierda a derecha) y el eje Y (arriba y abajo). Al igual que en la geometría básica, las coordenadas X-Y identifican la posición de la palanca con precisión.
Para determinar la ubicación de la palanca, el sistema de control del joystick simplemente monitorea la posición de cada eje. El diseño de joystick analógico convencional hace esto con dos potenciómetros o resistencias variables.
El joystick también cuenta con una entrada digital que se activa cuando el joystick se presiona hacia abajo.
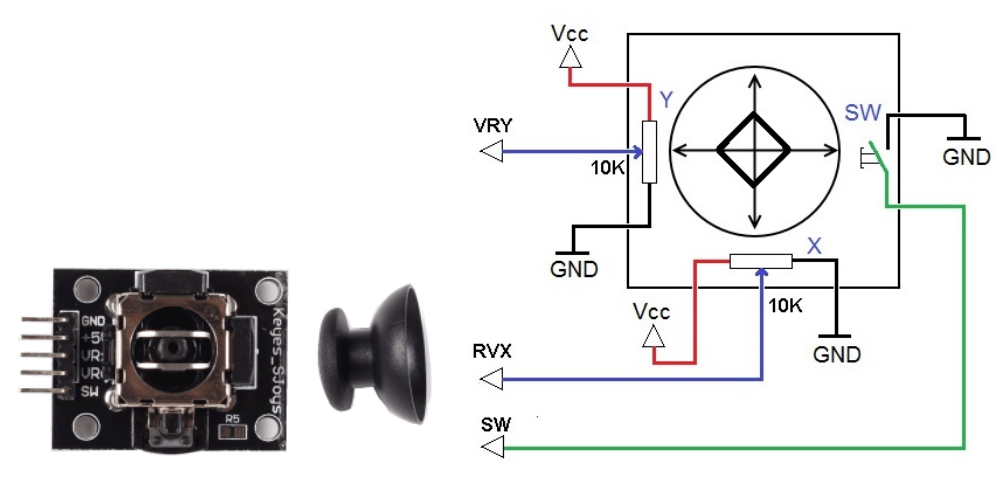
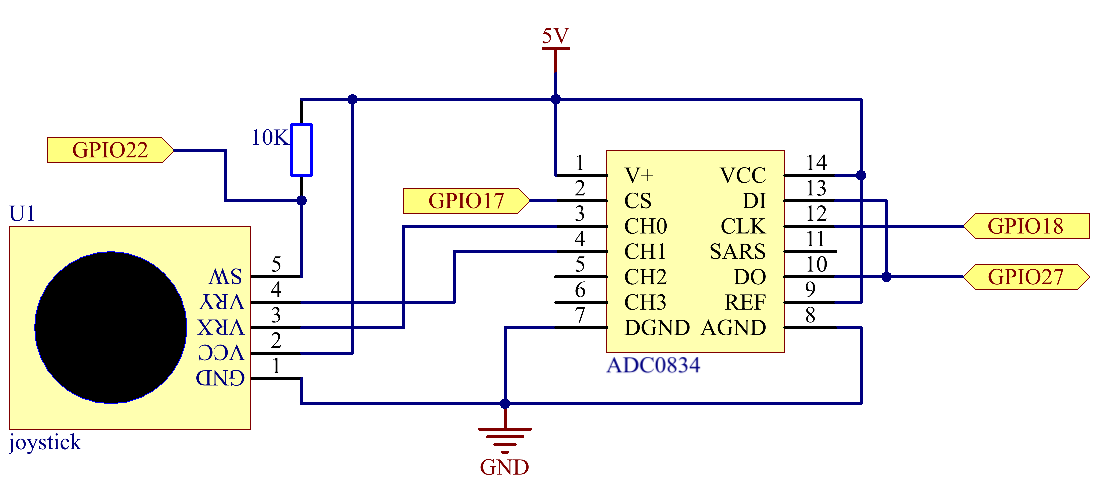
Diagrama Esquemático
Al leer los datos del joystick, hay algunas diferencias entre los ejes: los datos de los ejes X y Y son analógicos, por lo que se necesita utilizar el ADC0834 para convertir el valor analógico a digital. Los datos del eje Z son digitales, por lo que puedes leerlos directamente desde el GPIO, aunque también puedes usar el ADC para leerlos.
Procedimientos Experimentales
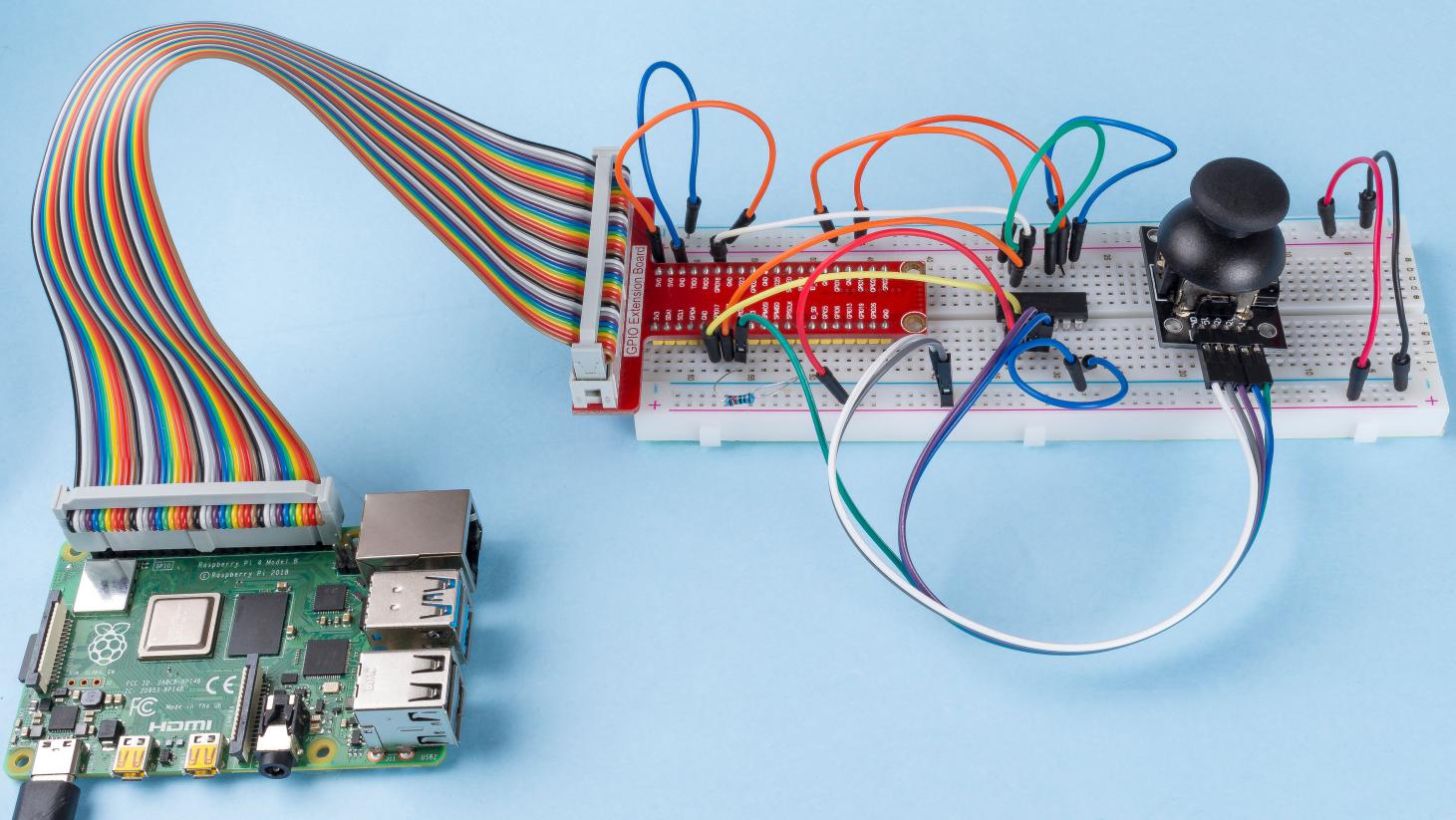
Paso 1: Construye el circuito.

Para Usuarios de Lenguaje C
Paso 2: Ve a la carpeta del código.
cd ~/davinci-kit-for-raspberry-pi/c/2.1.6/
Paso 3: Compila el código.
gcc 2.1.6_Joystick.c -lwiringPi
Paso 4: Ejecuta el archivo compilado.
sudo ./a.out
Después de ejecutar el código, mueve el joystick y los valores correspondientes de x, y y Btn se mostrarán en la pantalla.
Nota
Si no funciona después de ejecutarlo, o aparece un mensaje de error: "wiringPi.h: No such file or directory", consulta ¿El código en C no funciona?.
Código
#include <wiringPi.h>
#include <stdio.h>
#include <softPwm.h>
typedef unsigned char uchar;
typedef unsigned int uint;
#define ADC_CS 0
#define ADC_CLK 1
#define ADC_DIO 2
#define BtnPin 3
uchar get_ADC_Result(uint channel)
{
uchar i;
uchar dat1=0, dat2=0;
int sel = channel > 1 & 1;
int odd = channel & 1;
digitalWrite(ADC_CLK, 1);
delayMicroseconds(2);
digitalWrite(ADC_CLK, 0);
delayMicroseconds(2);
pinMode(ADC_DIO, OUTPUT);
digitalWrite(ADC_CS, 0);
// Bit de inicio
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// Modo de entrada única
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// Impar
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// Selección
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
}
int main(void)
{
uchar x_val;
uchar y_val;
uchar btn_val;
if(wiringPiSetup() == -1){ // Si la inicialización de wiring falla, imprime mensaje en la pantalla
printf("setup wiringPi failed !");
return 1;
}
pinMode(BtnPin, INPUT);
pullUpDnControl(BtnPin, PUD_UP);
pinMode(ADC_CS, OUTPUT);
pinMode(ADC_CLK, OUTPUT);
while(1){
x_val = get_ADC_Result(0);
y_val = get_ADC_Result(1);
btn_val = digitalRead(BtnPin);
printf("x = %d, y = %d, btn = %d\n", x_val, y_val, btn_val);
delay(100);
}
return 0;
}
Explicación del Código
uchar get_ADC_Result(uint channel)
{
uchar i;
uchar dat1=0, dat2=0;
int sel = channel > 1 & 1;
int odd = channel & 1;
digitalWrite(ADC_CLK, 1);
delayMicroseconds(2);
digitalWrite(ADC_CLK, 0);
delayMicroseconds(2);
pinMode(ADC_DIO, OUTPUT);
digitalWrite(ADC_CS, 0);
// Bit de inicio
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// Modo de entrada única
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
......
El proceso de funcionamiento de la función se detalla en el apartado 2.1.4 Potenciómetro.
while(1){
x_val = get_ADC_Result(0);
y_val = get_ADC_Result(1);
btn_val = digitalRead(BtnPin);
printf("x = %d, y = %d, btn = %d\n", x_val, y_val, btn_val);
delay(100);
}
VRX y VRY del joystick están conectados a CH0 y CH1 del ADC0834 respectivamente. Por lo tanto, se llama a la función getResult() para leer los valores de CH0 y CH1. Luego, los valores leídos se almacenan en las variables x_val y y_val. Además, se lee el valor de SW del joystick y se almacena en la variable btn_val. Finalmente, los valores de x_val, y_val y btn_val se muestran usando la función print().
Para Usuarios de Python
Paso 2: Dirígete a la carpeta del código.
cd ~/davinci-kit-for-raspberry-pi/python/
Paso 3: Ejecuta.
sudo python3 2.1.6_Joystick.py
Después de ejecutar el código, mueve el joystick y los valores correspondientes de x, y, Btn se mostrarán en la pantalla.
Código
Nota
Puedes Modificar/Restablecer/Copiar/Ejecutar/Detener el
código a continuación. Pero antes de hacerlo, debes dirigirte a
la ruta del código fuente como davinci-kit-for-raspberry-pi/python.
import RPi.GPIO as GPIO
import ADC0834
import time
BtnPin = 22
def setup():
# Establece los modos de GPIO en numeración BCM
GPIO.setmode(GPIO.BCM)
GPIO.setup(BtnPin, GPIO.IN, pull_up_down=GPIO.PUD_UP)
ADC0834.setup()
def destroy():
# Libera los recursos
GPIO.cleanup()
def loop():
while True:
x_val = ADC0834.getResult(0)
y_val = ADC0834.getResult(1)
Btn_val = GPIO.input(BtnPin)
print ('X: %d Y: %d Btn: %d' % (x_val, y_val, Btn_val))
time.sleep(0.2)
if __name__ == '__main__':
setup()
try:
loop()
except KeyboardInterrupt: # Cuando se presiona 'Ctrl+C', se ejecutará el programa destroy().
destroy()
Explicación del Código
def loop():
while True:
x_val = ADC0834.getResult(0)
y_val = ADC0834.getResult(1)
Btn_val = GPIO.input(BtnPin)
print ('X: %d Y: %d Btn: %d' % (x_val, y_val, Btn_val))
time.sleep(0.2)
VRX y VRY del joystick están conectados respectivamente a CH0 y CH1 del ADC0834. Por lo tanto, se llama a la función getResult() para leer los valores de CH0 y CH1. Los valores leídos se almacenan en las variables x_val y y_val. Además, se lee el valor de SW del joystick y se almacena en la variable Btn_val. Finalmente, los valores de x_val, y_val y Btn_val se muestran utilizando la función print().
Imagen del Fenómeno