Nota
¡Hola! Bienvenido a la comunidad de entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Únete para profundizar en Raspberry Pi, Arduino y ESP32 junto a otros apasionados.
¿Por qué unirse?
Soporte de expertos: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprender y compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Acceso exclusivo: Obtén primicias sobre nuevos productos y adelantos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones festivas y sorteos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
2.1.4 Potenciómetro
Nota
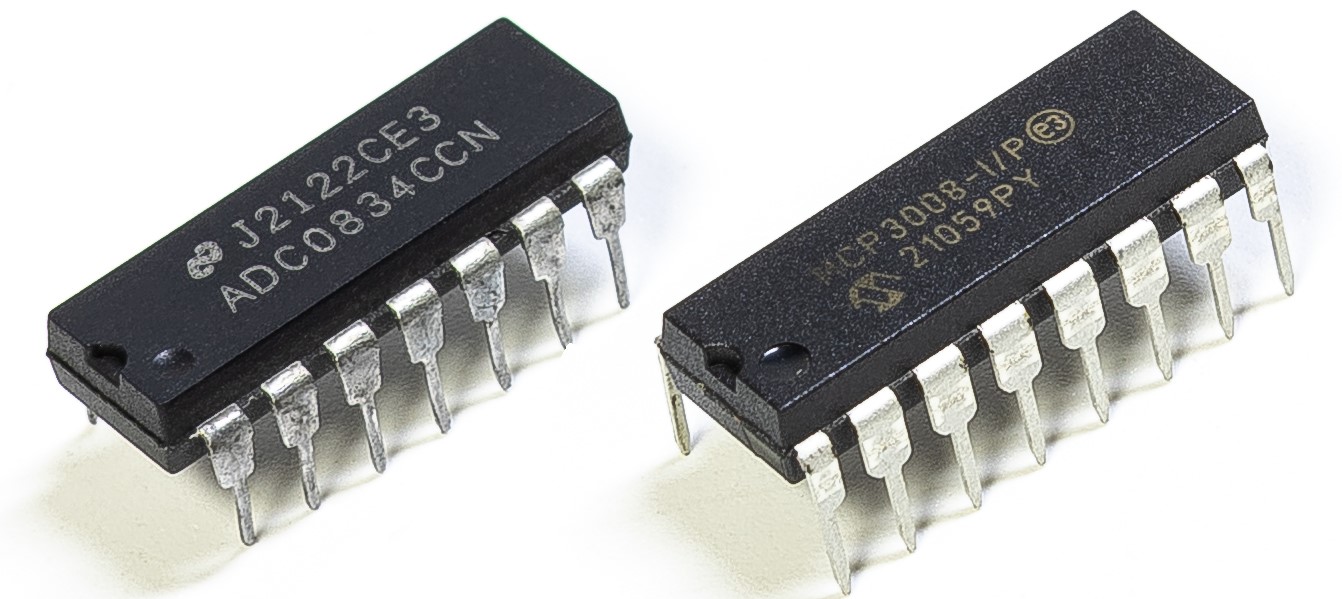
Dependiendo de la versión de tu kit, identifica si tienes ADC0834 o MCP3008 y procede con la sección correspondiente.
Introducción
La función de ADC permite convertir señales analógicas en digitales, y en este experimento se usa el ADC0834 para realizar esta conversión mediante un potenciómetro. El potenciómetro modifica la cantidad física de voltaje, que luego es convertida por la función ADC.
Componentes

Principio
ADC0834
ADC0834 es un convertidor analógico-digital (ADC) de 8 bits por aproximación sucesiva con un multiplexor de entrada analógica multicanal configurable. Utiliza una interfaz de E/S en serie, lo que lo hace adecuado para la adquisición de señales de sensores y la medición de voltajes analógicos en sistemas embebidos como Raspberry Pi.

Secuencia de Operación
La conversión se inicia colocando CS en bajo, lo que habilita todos los circuitos lógicos. CS debe mantenerse en bajo durante todo el proceso de conversión. El procesador proporciona una entrada de reloj, y con cada transición de bajo a alto de la entrada de reloj, los datos en DI se desplazan al registro de dirección del multiplexor. El primer valor alto en la entrada es el bit de inicio, seguido de una palabra de asignación de 3 a 4 bits. Con cada transición de reloj, el bit de inicio y la palabra de asignación se desplazan a través del registro de desplazamiento.
Cuando el bit de inicio alcanza la posición de inicio en el registro del multiplexor, se selecciona el canal de entrada y comienza la conversión. La salida de estado de SAR (SARS) pasa a alto indicando que la conversión está en progreso, y DI en el registro de desplazamiento del multiplexor se desactiva durante la conversión.
Se inserta automáticamente un período de reloj para permitir que el canal seleccionado se estabilice. La salida de datos DO sale del estado de alta impedancia y proporciona un nivel bajo inicial durante este período de estabilización del multiplexor. El comparador SAR compara salidas sucesivas de la escalera resistiva con la señal analógica entrante. A medida que avanza la conversión, los datos de conversión se envían en serie desde el pin de salida DO, comenzando por el bit más significativo (MSB).
Después de ocho períodos de reloj, la conversión se completa y la salida SARS pasa a bajo. Finalmente, se emite el bit menos significativo después de la secuencia de datos comenzando por el MSB.

Tabla de Lógica de Control de Dirección del MUX ADC0834

Potenciómetro
El potenciómetro es un componente de resistencia con tres terminales, y su valor de resistencia puede ajustarse según ciertas variaciones. Consiste en una resistencia y un cepillo móvil. Cuando el cepillo se desplaza a lo largo de la resistencia, se obtiene una salida de resistencia o voltaje que varía según el desplazamiento.

Las funciones del potenciómetro en el circuito son las siguientes:
Actuar como divisor de voltaje
El potenciómetro es una resistencia ajustable de forma continua. Cuando ajustas el eje o la manija deslizante del potenciómetro, el contacto móvil se desplaza sobre la resistencia. En este punto, se puede obtener un voltaje de salida dependiendo del voltaje aplicado al potenciómetro y del ángulo de rotación del brazo móvil o de la distancia que se mueva.
Diagrama Esquemático


Procedimientos Experimentales
Paso 1: Construye el circuito.

Nota
Coloca el chip siguiendo la posición correspondiente en la imagen. Ten en cuenta que las ranuras en el chip deben estar hacia la izquierda al colocarlo.
Para Usuarios de Lenguaje C
Paso 2: Abre el archivo de código.
cd ~/davinci-kit-for-raspberry-pi/c/2.1.4/
Paso 3: Compila el código.
gcc 2.1.4_Potentiometer.c -lwiringPi
Paso 4: Ejecuta.
sudo ./a.out
Después de ejecutar el código, gira el mando del potenciómetro y la intensidad del LED cambiará en consecuencia.
Nota
Si no funciona después de ejecutarlo, o aparece un mensaje de error: "wiringPi.h: No such file or directory», consulta ¿El código en C no funciona?.
Código
#include <wiringPi.h>
#include <stdio.h>
#include <softPwm.h>
typedef unsigned char uchar;
typedef unsigned int uint;
#define ADC_CS 0
#define ADC_CLK 1
#define ADC_DIO 2
#define LedPin 3
uchar get_ADC_Result(uint channel)
{
uchar i;
uchar dat1=0, dat2=0;
int sel = channel > 1 & 1;
int odd = channel & 1;
digitalWrite(ADC_CLK, 1);
delayMicroseconds(2);
digitalWrite(ADC_CLK, 0);
delayMicroseconds(2);
pinMode(ADC_DIO, OUTPUT);
digitalWrite(ADC_CS, 0);
// Start bit
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// Modo de entrada única
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// IMPAR
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// Selección
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
}
int main(void)
{
uchar analogVal;
if(wiringPiSetup() == -1){ // Si la inicialización de wiring falla, imprime mensaje en pantalla
printf("setup wiringPi failed !");
return 1;
}
softPwmCreate(LedPin, 0, 100);
pinMode(ADC_CS, OUTPUT);
pinMode(ADC_CLK, OUTPUT);
while(1){
analogVal = get_ADC_Result(0);
printf("Current analogVal : %d\n", analogVal);
delay(100);
softPwmWrite(LedPin, analogVal);
delay(100);
}
return 0;
}
Explicación del Código
#define ADC_CS 0
#define ADC_CLK 1
#define ADC_DIO 2
#define LedPin 3
Define CS, CLK, DIO del ADC0834 y conéctalos a GPIO0, GPIO1 y GPIO2, respectivamente. Luego, conecta el LED al GPIO3.
uchar get_ADC_Result(uint channel)
{
uchar i;
uchar dat1=0, dat2=0;
int sel = channel > 1 & 1;
int odd = channel & 1;
digitalWrite(ADC_CLK, 1);
delayMicroseconds(2);
digitalWrite(ADC_CLK, 0);
delayMicroseconds(2);
pinMode(ADC_DIO, OUTPUT);
digitalWrite(ADC_CS, 0);
// Bit de inicio
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// Modo de entrada única
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// IMPAR
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// Selección
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
}
Esta es una función del ADC0834 para obtener la conversión de analógico a digital. El flujo de trabajo específico es el siguiente:
digitalWrite(ADC_CS, 0);
Establece CS en nivel bajo y comienza a habilitar la conversión AD.
// Bit de inicio
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
Cuando ocurre la primera transición de bajo a alto en la entrada de reloj, establece DIO en 1 como bit de inicio. En los tres pasos siguientes, se envían 3 palabras de asignación.
// Modo de entrada única
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
Cuando ocurre la segunda transición de bajo a alto en la entrada de reloj, configura DIO en 1 y selecciona el modo SGL.
// IMPAR
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
Al ocurrir la tercera transición, el valor de DIO es controlado por la variable odd.
// Selección
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
Con la cuarta transición de bajo a alto de CLK, el valor de DIO es controlado por la variable sel.
Bajo la condición de que channel=0, sel=0, odd=0, las fórmulas de operación para sel y odd son las siguientes:
int sel = channel > 1 & 1;
int odd = channel & 1;
Cuando se cumple la condición channel=1, sel=0, odd=1, consulta la siguiente tabla de lógica de control de direcciones. Aquí se elige CH1, y el bit de inicio se desplaza a la ubicación inicial del registro del multiplexor, comenzando la conversión.

digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
Aquí, se establece DIO en 1 dos veces; puedes ignorarlo.
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
En la primera declaración for(), tan pronto como el quinto pulso de CLK pasa de alto a bajo, establece DIO en modo de entrada. Luego comienza la conversión y el valor convertido se almacena en la variable dat1. Después de ocho períodos de reloj, la conversión se completa.
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
En la segunda declaración for(), se envían los valores convertidos a través de DO después de otros ocho períodos de reloj y se almacenan en la variable dat2.
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
return(dat1==dat2) ? dat1 : 0 se usa para comparar el valor obtenido durante la conversión con el valor de salida. Si son iguales, se devuelve el valor de conversión dat1; de lo contrario, se devuelve 0. Aquí, el flujo de trabajo del ADC0834 se completa.
softPwmCreate(LedPin, 0, 100);
La función crea un pin PWM en software, LedPin, luego establece el ancho de pulso inicial en 0, y el período de PWM es 100 x 100us.
while(1){
analogVal = get_ADC_Result(0);
printf("Current analogVal : %d\n", analogVal);
softPwmWrite(LedPin, analogVal);
delay(100);
}
En el programa principal, lee el valor del canal 0, que está conectado a un potenciómetro. Almacena el valor en la variable analogVal y luego escríbelo en LedPin. Ahora puedes ver cómo la intensidad del LED cambia con el valor del potenciómetro.
Para Usuarios de Python
Paso 2: Abre el archivo de código
cd ~/davinci-kit-for-raspberry-pi/python/
Paso 3: Ejecuta.
sudo python3 2.1.4_Potentiometer.py
Después de ejecutar el código, gira el mando del potenciómetro y la intensidad del LED cambiará en consecuencia.
Código
Nota
Puedes Modificar/Restablecer/Copiar/Ejecutar/Detener el código a continuación. Pero antes, debes ir a la ruta de origen del código, como davinci-kit-for-raspberry-pi/python.
import RPi.GPIO as GPIO
import ADC0834
import time
LedPin = 22
def setup():
global led_val
# Configura los modos de GPIO en numeración BCM
GPIO.setmode(GPIO.BCM)
# Configura el modo de LedPin como salida y el nivel inicial en alto (3.3v)
GPIO.setup(LedPin, GPIO.OUT, initial=GPIO.HIGH)
ADC0834.setup()
# Configura el LED como canal PWM con frecuencia de 2KHz
led_val = GPIO.PWM(LedPin, 2000)
# Inicia con valor 0
led_val.start(0)
def destroy():
# Detiene todos los canales PWM
led_val.stop()
# Libera recursos
GPIO.cleanup()
def loop():
while True:
analogVal = ADC0834.getResult()
print ('analog value = %d' % analogVal)
led_val.ChangeDutyCycle(analogVal*100/255)
time.sleep(0.2)
if __name__ == '__main__':
setup()
try:
loop()
except KeyboardInterrupt: # Cuando se presiona 'Ctrl+C', se ejecutará el programa destroy().
destroy()
Explicación del Código
import ADC0834
Importa la biblioteca ADC0834. Puedes revisar el contenido de la biblioteca usando el comando nano ADC0834.py.
def setup():
global led_val
# Configura los modos de GPIO en numeración BCM
GPIO.setmode(GPIO.BCM)
# Configura el modo de LedPin como salida y el nivel inicial en alto (3.3v)
GPIO.setup(LedPin, GPIO.OUT, initial=GPIO.HIGH)
ADC0834.setup()
# Configura el LED como canal PWM con frecuencia de 2KHz
led_val = GPIO.PWM(LedPin, 2000)
# Inicia con valor 0
led_val.start(0)
En setup(), define el modo de nombramiento como BCM, configura LedPin como canal PWM y establece una frecuencia de 2Khz.
ADC0834.setup(): Inicializa ADC0834 y conecta los pines definidos CS, CLK, DIO del ADC0834 a GPIO17, GPIO18 y GPIO27, respectivamente.
def loop():
while True:
res = ADC0834.getResult()
print ('res = %d' % res)
R_val = MAP(res, 0, 255, 0, 100)
led_val.ChangeDutyCycle(R_val)
time.sleep(0.2)
La función getResult() se usa para leer los valores analógicos de los cuatro canales de ADC0834. Por defecto, la función lee el valor de CH0, y si deseas leer otros canales, ingresa el número de canal en ( ), por ejemplo, getResult(1).
La función loop() primero lee el valor de CH0 y luego lo asigna a la variable res. Después, llama a la función MAP para asignar el valor leído del potenciómetro al rango de 0~100. Este paso se utiliza para controlar el ciclo de trabajo de LedPin. Ahora, puedes observar que el brillo del LED cambia con el valor del potenciómetro.
Imagen del Fenómeno
