Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.1.3 Neigungsschalter
Einführung
Dies ist ein Kugelkippschalter mit einer Metallkugel im Inneren. Es wird verwendet, um Neigungen eines kleinen Winkels zu erfassen.
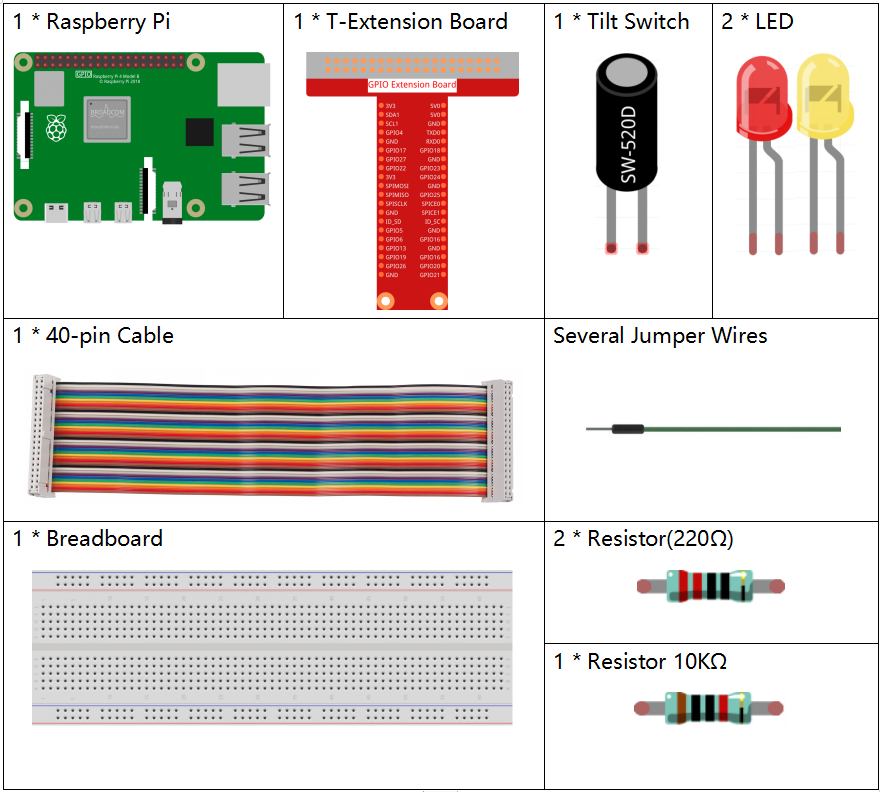
Komponenten
Prinzip
Neigung
Das Prinzip ist sehr einfach. Wenn der Schalter in einem bestimmten Winkel gekippt wird, rollt die Kugel im Inneren nach unten und berührt die beiden Kontakte, die mit den Pins außen verbunden sind, wodurch Schaltkreise ausgelöst werden. Andernfalls bleibt der Ball von den Kontakten fern und unterbricht so die Stromkreise.
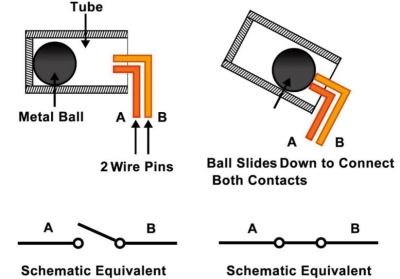
Schematische Darstellung
Experimentelle Verfahren
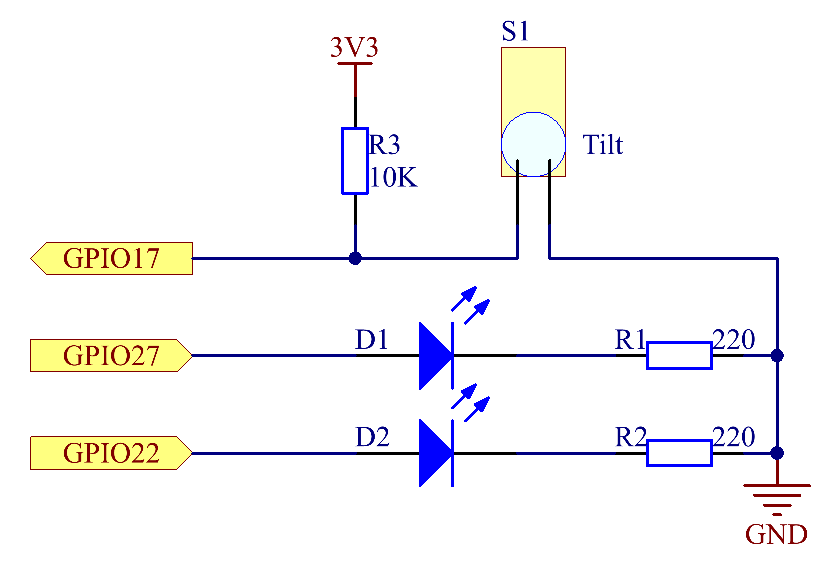
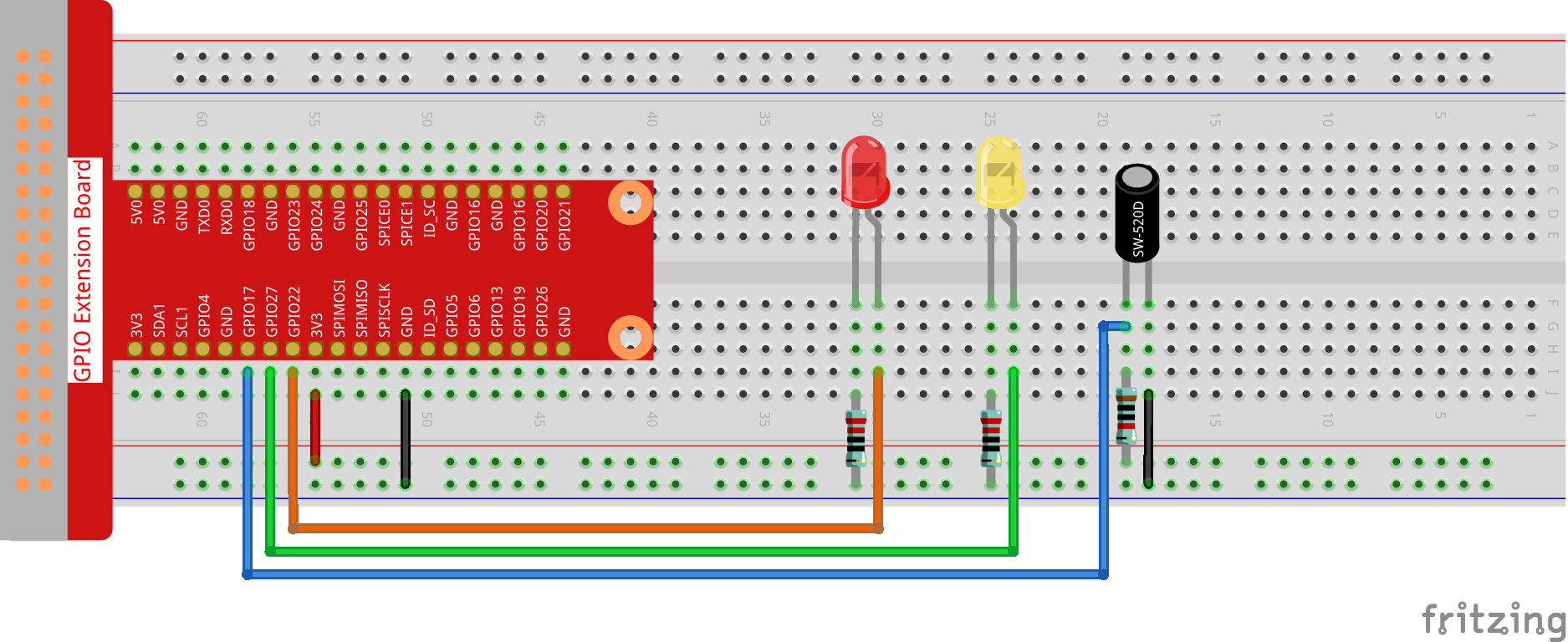
Schritt 1: Bauen Sie die Schaltung auf.
Schritt 2: Verzeichnis wechseln.
cd ~/davinci-kit-for-raspberry-pi/c/2.1.3/
Schritt 3: Kompilieren.
gcc 2.1.3_Tilt.c -lwiringPi
Schritt 4: Ausführen.
sudo ./a.out
Wenn Sie die Neigung horizontal platzieren, leuchtet die grüne LED auf. Wenn Sie es kippen, „Neigung!“ wird auf dem Bildschirm gedruckt und die rote LED leuchtet auf. Stellen Sie es wieder horizontal auf und die grüne LED leuchtet wieder auf.
Code
#include <wiringPi.h>
#include <stdio.h>
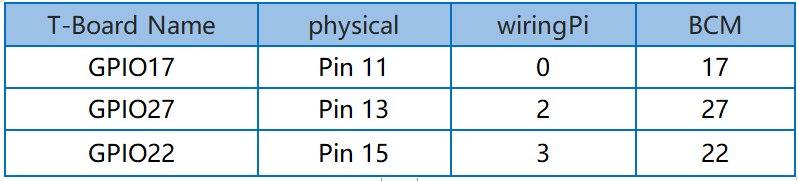
#define TiltPin 0
#define Gpin 2
#define Rpin 3
void LED(char* color)
{
pinMode(Gpin, OUTPUT);
pinMode(Rpin, OUTPUT);
if (color == "RED")
{
digitalWrite(Rpin, HIGH);
digitalWrite(Gpin, LOW);
}
else if (color == "GREEN")
{
digitalWrite(Rpin, LOW);
digitalWrite(Gpin, HIGH);
}
else
printf("LED Error");
}
int main(void)
{
if(wiringPiSetup() == -1){ //when initialize wiring failed,print message to screen
printf("setup wiringPi failed !");
return 1;
}
pinMode(TiltPin, INPUT);
LED("GREEN");
while(1){
if(0 == digitalRead(TiltPin)){
delay(10);
if(0 == digitalRead(TiltPin)){
LED("RED");
printf("Tilt!\n");
delay(100);
}
}
else if(1 == digitalRead(TiltPin)){
delay(10);
if(1 == digitalRead(TiltPin)){
LED("GREEN");
}
}
}
return 0;
}
Code Erklärung
void LED(char* color)
{
pinMode(Gpin, OUTPUT);
pinMode(Rpin, OUTPUT);
if (color == "RED")
{
digitalWrite(Rpin, HIGH);
digitalWrite(Gpin, LOW);
}
else if (color == "GREEN")
{
digitalWrite(Rpin, LOW);
digitalWrite(Gpin, HIGH);
}
else
printf("LED Error");
}
Definieren Sie eine Funktions- LED() , um die beiden LEDs ein- oder auszuschalten. Wenn die Parameterfarbe ROT ist, leuchtet die rote LED auf. Wenn die Parameterfarbe GRÜN ist, leuchtet die grüne LED ebenfalls auf.
while(1){
if(0 == digitalRead(TiltPin)){
delay(10);
if(0 == digitalRead(TiltPin)){
LED("RED");
printf("Tilt!\n");
}
}
else if(1 == digitalRead(TiltPin)){
delay(10);
if(1 == digitalRead(TiltPin)){
LED("GREEN");
}
}
}
Wenn der Lesewert des Neigungsschalters 0 ist, bedeutet dies, dass der Neigungsschalter gekippt ist. Dann schreiben Sie den Parameter „ROT“ in die Funktions-LED, damit die rote LED aufleuchtet. Andernfalls leuchtet die grüne LED.