注釈
こんにちは、SunFounder Raspberry Pi & Arduino & ESP32 Enthusiast Community on Facebookへようこそ!他の愛好家と一緒に、Raspberry Pi、Arduino、ESP32の世界により深く入り込みましょう。
参加する理由
専門家サポート: 購入後の問題や技術的な課題を、コミュニティと私たちのチームの助けを借りて解決します。
学習と共有: ヒントやチュートリアルを交換して、スキルを向上させましょう。
限定プレビュー: 新製品の発表や先行プレビューに早期アクセスできます。
特別割引: 最新製品を特別割引でお楽しみいただけます。
季節限定キャンペーンとプレゼント: プレゼント企画やホリデーキャンペーンに参加しましょう。
👉 一緒に発見し、創造する準備はできましたか? [こちら] をクリックして、今すぐ参加しましょう!
8. 顔と目の検出
この章では、Raspberry Pi の Picamera2 を使って映像を取得し、OpenCV の Haar 特徴分類器を用いて リアルタイムの顔検出と目の検出 を行います。 この方法は軽量で実用性が高く、Raspberry Pi 上での導入を始める初学者にも適しています。
1. Haar 特徴と検出の原理
Haar 特徴の本質
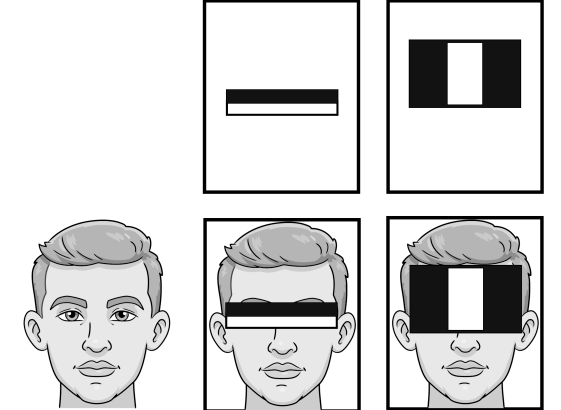
Haar 特徴は、物体検出に使われる古典的な手法です。画像領域内の 明るさの差のパターン を表現することで、その領域に顔や目などが含まれている可能性を判断します。
代表的な Haar 特徴の例:
目の領域は、上にある額よりも暗いことが多い
鼻筋の左右では、明るさが対称になりやすい
口の下には、はっきりしたエッジパターンが現れやすい
OpenCV では、事前学習済みの Haar 分類器( .xml ファイル)が必要です。これらはすでにサンプルディレクトリに含まれているため、そのまま読み込んで使用できます。
検出パイプライン
CascadeClassifierを使って学習済み Haar モデルを読み込むリアルタイム映像をグレースケールに変換する(処理効率向上のため)
detectMultiScaleを使って顔や目の領域を検出する検出された対象の周囲に矩形を描画する

2. コードの実行
重要
開始する前に、次の項目を確認してください:
パンチルトが組み立てられている
Raspberry Pi のデスクトップにアクセスできる
コードパッケージがインストールされている
Fusion HAT+ がインストールされ、設定されている
OpenCV がインストールされている
詳細については 0. OpenCV のセットアップ を参照してください。
ターミナルを開き、次のコマンドを入力します:
cd ~/ai-lab-kit/opencv_python python3 cv_8_haarcascade.py
Tip
動画ファイルから顔と目を検出するための
cv_8_haarcascade_video.pyも用意しています。プログラムを実行すると、 Raspberry Pi Camera - Face Detection という名前のウィンドウが表示され、Raspberry Pi Camera のライブ映像が映し出されます。
映像内で検出された顔は 黄色の矩形 で囲まれ、それぞれの顔には
Face 1、Face 2... のようにラベルが付けられます。 また、各顔領域の内部では目も検出され、 オレンジ色の矩形 で表示されます。検出はリアルタイムで行われ、人がカメラの前で動くと矩形もそれに追従して移動します。
プログラムを停止するには、次のいずれかを行ってください:
キーボードの q キーを押す
ウィンドウ右上の閉じるボタン(X)でウィンドウを閉じる
終了後は、カメラが停止し、OpenCV のウィンドウもすべて閉じられます。
3. 完全なコード
# Face and eye detection using Raspberry Pi Camera (Picamera2 + OpenCV Haar Cascades)
import cv2
from picamera2 import Picamera2
from pathlib import Path
# -----------------------------
# Load Haar cascade classifiers
# -----------------------------
BASE_DIR = Path(__file__).resolve().parent
face_cascade = cv2.CascadeClassifier(str(BASE_DIR / "haarcascade_frontalface_default.xml"))
eye_cascade = cv2.CascadeClassifier(str(BASE_DIR / "haarcascade_eye.xml"))
# Check if cascade files are loaded correctly
if face_cascade.empty():
raise FileNotFoundError("Failed to load haarcascade_frontalface_default.xml")
if eye_cascade.empty():
raise FileNotFoundError("Failed to load haarcascade_eye.xml")
# -----------------------------
# Initialize Picamera2
# -----------------------------
picam2 = Picamera2()
# Video configuration (resolution can be adjusted)
config = picam2.create_video_configuration(main={"size": (640, 480)})
picam2.configure(config)
picam2.start()
WIN = "Raspberry Pi Camera - Face Detection"
print("Camera started. Press 'q' to quit.")
try:
while True:
# Capture a frame (Picamera2 typically provides RGB)
frame_rgb = picam2.capture_array()
# Convert RGB -> Grayscale directly (faster than RGB->BGR->GRAY)
gray = cv2.cvtColor(frame_rgb, cv2.COLOR_RGB2GRAY)
# Improve contrast to make detection more stable under different lighting
gray = cv2.equalizeHist(gray)
# Detect faces
faces = face_cascade.detectMultiScale(
gray,
scaleFactor=1.2,
minNeighbors=5,
minSize=(60, 60)
)
# Convert RGB -> BGR only for display and drawing (OpenCV imshow expects BGR)
frame_bgr = cv2.cvtColor(frame_rgb, cv2.COLOR_RGB2BGR)
# Draw face and eye results
for i, (x, y, w, h) in enumerate(faces, start=1):
# Draw face rectangle + label
cv2.rectangle(frame_bgr, (x, y), (x + w, y + h), (255, 255, 0), 2)
cv2.putText(frame_bgr, f"Face {i}", (x, max(0, y - 10)),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 0), 2)
# ROI for eye detection (search eyes only inside the detected face area)
roi_gray = gray[y:y + h, x:x + w]
roi_color = frame_bgr[y:y + h, x:x + w]
eyes = eye_cascade.detectMultiScale(
roi_gray,
scaleFactor=1.2,
minNeighbors=8,
minSize=(20, 20)
)
# Draw up to 2 eyes (typical for a face)
for (ex, ey, ew, eh) in eyes[:2]:
cv2.rectangle(roi_color, (ex, ey), (ex + ew, ey + eh), (0, 127, 255), 2)
# Show the frame
cv2.imshow(WIN, frame_bgr)
# Handle keyboard input
key = cv2.waitKey(1) & 0xFF
if key == ord("q"):
break
# Exit if the user closes the window (click X)
if cv2.getWindowProperty(WIN, cv2.WND_PROP_VISIBLE) < 1:
break
finally:
picam2.stop()
cv2.destroyAllWindows()
print("Camera stopped.")
4. コード解説
必要なライブラリをインポートする:
import cv2 from picamera2 import Picamera2 from pathlib import Path
OpenCV は検出と描画に使用し、Picamera2 は Raspberry Pi カメラからフレームを取得するために使用します。
現在のスクリプトのディレクトリを取得する:
BASE_DIR = Path(__file__).resolve().parent
これにより、Python スクリプトと同じフォルダにある cascade XML ファイルを読み込めます。
Haar 分類器(顔と目)を読み込む:
face_cascade = cv2.CascadeClassifier(str(BASE_DIR / "haarcascade_frontalface_default.xml")) eye_cascade = cv2.CascadeClassifier(str(BASE_DIR / "haarcascade_eye.xml"))
Haar Cascade は、顔や目を検出するために事前学習されたモデルです。
Cascade ファイルが正しく読み込まれたか確認する:
if face_cascade.empty(): raise FileNotFoundError("Failed to load haarcascade_frontalface_default.xml") if eye_cascade.empty(): raise FileNotFoundError("Failed to load haarcascade_eye.xml")
パスが間違っていたり、ファイルが存在しない場合、
CascadeClassifierは空になります。 この確認を行うことで、問題を早い段階で見つけやすくなります。カメラを初期化し、解像度を設定する:
picam2 = Picamera2() config = picam2.create_video_configuration(main={"size": (640, 480)}) picam2.configure(config) picam2.start()
これにより、640×480 のビデオモードでカメラが起動します。
フレームを連続して取得する:
frame_rgb = picam2.capture_array()
ループごとに 1 フレームを取得します。Picamera2 は通常 RGB 形式のフレームを返します。
グレースケールへ変換する(検出を高速化するため):
gray = cv2.cvtColor(frame_rgb, cv2.COLOR_RGB2GRAY)
顔検出や目検出はグレースケール画像で動作し、カラー画像よりも高速です。
コントラストを改善して検出を安定させる:
gray = cv2.equalizeHist(gray)
ヒストグラム平坦化を行うことで、異なる照明条件でも検出結果が安定しやすくなります。
フレーム内の顔を検出する:
faces = face_cascade.detectMultiScale( gray, scaleFactor=1.2, minNeighbors=5, minSize=(60, 60) )
これにより、検出されたすべての顔について
(x, y, w, h)の矩形リストが返されます。scaleFactorは画像スケールの縮小ステップを制御します(小さいほど高精度になりやすい一方、遅くなります)。minNeighborsは誤検出を減らします(大きいほど厳しくなります)。minSizeは非常に小さい検出結果を無視します。
描画と表示のために RGB を BGR へ変換する:
frame_bgr = cv2.cvtColor(frame_rgb, cv2.COLOR_RGB2BGR)
OpenCV の描画関数と
imshowは、カラー画像に対して BGR を前提としています。顔の矩形とラベルを描画する:
cv2.rectangle(frame_bgr, (x, y), (x + w, y + h), (255, 255, 0), 2) cv2.putText(frame_bgr, f"Face {i}", (x, max(0, y - 10)), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 0), 2)
これにより、検出された各顔の周囲に矩形を描き、
Face 1のようなラベルを表示します。各顔の内部(ROI)で目を検出する:
roi_gray = gray[y:y + h, x:x + w] roi_color = frame_bgr[y:y + h, x:x + w] eyes = eye_cascade.detectMultiScale( roi_gray, scaleFactor=1.2, minNeighbors=8, minSize=(20, 20) )
ROI は “Region of Interest” の略です。目の検出を顔領域の内部だけに限定することで、高速化でき、誤検出も減らせます。
最大 2 つの目を描画する:
for (ex, ey, ew, eh) in eyes[:2]: cv2.rectangle(roi_color, (ex, ey), (ex + ew, ey + eh), (0, 127, 255), 2)
これにより、最初に検出された 2 つの目の周囲に矩形を描きます。
結果を表示し、終了を処理する:
cv2.imshow(WIN, frame_bgr) key = cv2.waitKey(1) & 0xFF if key == ord("q"): break if cv2.getWindowProperty(WIN, cv2.WND_PROP_VISIBLE) < 1: break
qキーを押すか、ウィンドウを閉じることで安全に終了できます。後片付け(必ず実行される):
picam2.stop() cv2.destroyAllWindows()
エラーが発生した場合でも、最後にカメラを停止し、OpenCV のウィンドウをすべて閉じます。
5. Haar 検出の長所と短所
Aspect |
Advantages |
Disadvantages |
|---|---|---|
Speed |
非常に高速で、Raspberry Pi に適している |
|
Accuracy |
正面顔にはよく機能する |
回転や横顔には弱い |
Lighting |
均一な照明下では良好 |
明るすぎる/暗すぎる環境では性能が低下する |
Model |
モデルサイズが小さく、導入が容易 |
深層学習ベースの手法より精度は低い |
軽量かつ高速であるため、Haar 特徴は現在でも組み込み機器において十分実用的です。
6. よく使われる改善方法
照明前処理:検出前にヒストグラム平坦化や CLAHE を適用すると、暗所での性能を改善できます。
多角度検出:正面顔用だけでなく横顔用の分類器も読み込むことで、より多くの顔姿勢に対応できます。
顔パーツの追加検出:目や口、鼻の Haar 分類器を追加し、検出内容をより充実させることができます。
Haar の代わりに DNN を使う:OpenCV DNN + ResNet/MobileNet を使うと、より高い精度が得られます(ただし計算量は増えます)。
7. 発展練習
cv2.equalizeHistをグレースケール画像に適用して、暗い環境での検出性能を改善してみましょう。口や鼻の Haar 分類器を追加して、より多くの顔パーツを検出してみましょう。
cv2.VideoWriterを使って、検出結果を動画として記録してみましょう。GPIO 出力と組み合わせて、「顔を検出したら LED を点灯する」Raspberry Pi プロジェクトを作ってみましょう。