注釈
こんにちは、SunFounder Raspberry Pi & Arduino & ESP32 Enthusiast Community on Facebookへようこそ!他の愛好家と一緒に、Raspberry Pi、Arduino、ESP32の世界により深く入り込みましょう。
参加する理由
専門家サポート: 購入後の問題や技術的な課題を、コミュニティと私たちのチームの助けを借りて解決します。
学習と共有: ヒントやチュートリアルを交換して、スキルを向上させましょう。
限定プレビュー: 新製品の発表や先行プレビューに早期アクセスできます。
特別割引: 最新製品を特別割引でお楽しみいただけます。
季節限定キャンペーンとプレゼント: プレゼント企画やホリデーキャンペーンに参加しましょう。
👉 一緒に発見し、創造する準備はできましたか? [こちら] をクリックして、今すぐ参加しましょう!
6. CAMShift による物体追跡
前章では、色ヒストグラムに基づいて動画内のターゲットを連続的に追跡できる MeanShift アルゴリズムを学びました。 この節では、 CAMShift (Continuously Adaptive Mean Shift) を紹介します。 CAMShift は MeanShift を拡張し、 追跡ウィンドウのサイズと向きを自動的に適応 できるため、実際のアプリケーションでより実用的です。 さらに、この例では 色ではなく明るさに基づいて ターゲットを追跡します。これは実際の用途でも非常によく使われる方法です。
1. アルゴリズムの特徴
MeanShift はターゲットの位置だけを追跡でき、ウィンドウサイズは固定です。 一方、 CAMShift は位置の追跡に加えて、 ウィンドウのサイズと角度も自動的に調整 できます。
たとえば、ターゲットがカメラに近づけば追跡枠は大きくなり、遠ざかれば小さくなります。さらに、ターゲットが回転すれば、枠もそれに合わせて回転します。
2. コードの実行
重要
開始する前に、次の項目を確認してください:
パンチルトが組み立てられている
Raspberry Pi のデスクトップにアクセスできる
コードパッケージがインストールされている
Fusion HAT+ がインストールされ、設定されている
OpenCV がインストールされている
詳細については 0. OpenCV のセットアップ を参照してください。
ターミナルを開き、次のコマンドを入力します:
cd ~/ai-lab-kit/opencv_python python3 cv_6_camshift.py
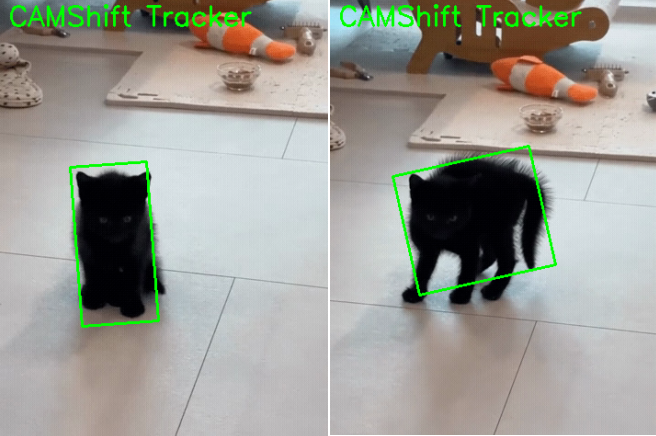
プログラムを実行すると、 CAMShift Tracker という名前の OpenCV ウィンドウが表示され、動画ファイル sample3.mp4 の再生が始まります。
このプログラムでは、CAMShift(Continuously Adaptive Mean Shift)アルゴリズムを使って黒い猫を追跡します。
追跡対象の周囲には、緑色の回転矩形が描画されます。 猫が移動したり、サイズや向きが変わったりすると、追跡ウィンドウは位置・大きさ・角度を自動的に調整します。
プログラムを終了する方法は 2 つあります:
キーボードの q キーを押す
ウィンドウの閉じるボタン(X)をクリックして閉じる
終了すると、動画の再生が停止し、すべての OpenCV ウィンドウが閉じられます。
3. 完全なコード
完全なコードは cv_6_camshift.py を開いて確認してください。
# Python program to demonstrate CAMShift (tracking a dark object)
import numpy as np
import cv2
# Read video
cap = cv2.VideoCapture("sample3.mp4")
# Retrieve the first frame from the video
ret, frame = cap.read()
if not ret:
raise RuntimeError("Cannot read the video file.")
# Set the initial region for tracking window (x, y, width, height)
x, y, w, h = 100, 200, 40, 40
track_window = (x, y, w, h)
# Convert first frame to HSV
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# Extract ROI (only the target area) in HSV
hsv_roi = hsv[y:y+h, x:x+w]
# For tracking a black object, we keep dark pixels (low V) inside ROI
# V channel is hsv[..., 2], so we build a mask based on V <= 80
roi_mask = cv2.inRange(hsv_roi, np.array((0, 0, 0)), np.array((180, 255, 80)))
# Build histogram on V channel (channel index 2) within ROI
# Use 256 bins for V (0~256) to match back projection range
roi_hist = cv2.calcHist([hsv_roi], [2], roi_mask, [256], [0, 256])
cv2.normalize(roi_hist, roi_hist, 0, 255, cv2.NORM_MINMAX)
# Termination criteria for CAMShift
term_crit = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 1)
# FPS delay (fallback if FPS is unavailable)
fps = cap.get(cv2.CAP_PROP_FPS)
if not fps or fps <= 1e-3:
fps = 30.0
delay_ms = int(1000 / fps)
WINDOW_NAME = "CAMShift Tracker"
while True:
ret, frame = cap.read()
# If video ends, restart from beginning
if not ret:
cap.set(cv2.CAP_PROP_POS_FRAMES, 0)
continue
# Convert frame to HSV
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# Back projection on V channel using ROI histogram (range 0~256)
back_proj = cv2.calcBackProject([hsv], [2], roi_hist, [0, 256], 1)
# Apply CAMShift
rot_rect, track_window = cv2.CamShift(back_proj, track_window, term_crit)
# Draw rotated rectangle
pts = cv2.boxPoints(rot_rect).astype(np.int32)
cv2.polylines(frame, [pts], True, (0, 255, 0), 2)
cv2.putText(frame, "CAMShift Tracker", (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow(WINDOW_NAME, frame)
# Keyboard + GUI events
key = cv2.waitKey(delay_ms) & 0xFF
if key == ord("q"):
break
# Exit if user closes the window (click X)
if cv2.getWindowProperty(WINDOW_NAME, cv2.WND_PROP_VISIBLE) < 1:
break
cap.release()
cv2.destroyAllWindows()
4. コード解説
動画ファイルを開き、最初のフレームを読み込む:
cap = cv2.VideoCapture("sample3.mp4") ret, frame = cap.read() if not ret: raise RuntimeError("Cannot read the video file.")
CAMShift は、最初のフレームを使って何を追跡するかを学習します。
初期追跡ウィンドウ(ROI)を設定する:
x, y, w, h = 100, 200, 40, 40 track_window = (x, y, w, h)
この矩形は、最初のフレーム内でターゲット物体を覆う必要があります。 CAMShift は追跡中にこのウィンドウを自動更新します。
最初のフレームを HSV に変換し、ROI を切り出す:
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) hsv_roi = hsv[y:y+h, x:x+w]
HSV は、V チャンネルのような特定の成分を選んで扱えるため、追跡に便利です。
暗い物体用のマスクを作成する(低い V 値):
roi_mask = cv2.inRange(hsv_roi, np.array((0, 0, 0)), np.array((180, 255, 80)))
これにより、ROI 内の「暗い」画素だけが残ります。 黒色や暗い物体では、明るさ(V)がもっとも有効な特徴になることが多いです。
V チャンネルのヒストグラムを計算し、正規化する:
roi_hist = cv2.calcHist([hsv_roi], [2], roi_mask, [256], [0, 256]) cv2.normalize(roi_hist, roi_hist, 0, 255, cv2.NORM_MINMAX)
チャンネル
2は、HSV の V(Value / 明るさ) チャンネルを意味します。このヒストグラムは、ターゲット ROI の「暗さ / 明るさ」の分布を表します。
正規化によって追跡がより安定します。
CAMShift の終了条件を設定する:
term_crit = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 1)
CAMShift は、10 回の反復に達するか、移動量が 1 ピクセル未満になった時点で更新を終了します。
FPS に基づいて再生速度を設定する:
fps = cap.get(cv2.CAP_PROP_FPS) if not fps or fps <= 1e-3: fps = 30.0 delay_ms = int(1000 / fps)
これにより、動画が元の FPS に近い速度で再生されます。
バックプロジェクションで確率マップを作成する(V チャンネル):
back_proj = cv2.calcBackProject([hsv], [2], roi_hist, [0, 256], 1)
バックプロジェクションは、フレーム内で ROI ヒストグラムに一致する V 値を持つ画素を強調します。
back_proj内で明るい値ほど、「ターゲットである可能性が高い」ことを意味します。CAMShift で追跡し、ウィンドウを更新する:
rot_rect, track_window = cv2.CamShift(back_proj, track_window, term_crit)
CAMShift は MeanShift をベースにしていますが、追跡ウィンドウの サイズと回転 にも対応できます。
track_windowは各フレームで更新されます。rot_rectには回転矩形(中心、サイズ、角度)が含まれます。
回転した追跡枠を描画する:
pts = cv2.boxPoints(rot_rect).astype(np.int32) cv2.polylines(frame, [pts], True, (0, 255, 0), 2)
これにより、回転矩形が 4 つの頂点に変換され、フレーム上に描画されます。
終了条件(キーボード入力 + ウィンドウを閉じる):
key = cv2.waitKey(delay_ms) & 0xFF if key == ord("q"): break if cv2.getWindowProperty(WINDOW_NAME, cv2.WND_PROP_VISIBLE) < 1: break
qを押すか、ウィンドウを閉じると安全に終了できます。リソースを解放する:
cap.release() cv2.destroyAllWindows()
最後に必ず動画ファイルを解放し、ウィンドウを閉じてください。
5. CAMShift と MeanShift の比較
Feature |
MeanShift |
CAMShift |
|---|---|---|
Window size |
固定 |
可変 |
Angle |
非対応 |
回転対応 |
Tracking accuracy |
中程度 |
より高く、適応性が高い |
Applications |
静的なターゲット |
複雑な動き、回転するターゲット |
CAMShift は MeanShift を発展させた手法であり、 ターゲットの変形、回転、距離変化にもより柔軟に対応できるため、現実のシーンに適しています。
6. 拡張と練習
inRangeのしきい値を調整して、緑や青のターゲットを追跡してみましょうライブカメラ入力と組み合わせて、リアルタイムの色ベース追跡システムを作ってみましょう
7. 応用: インタラクティブな ROI 選択と HSV しきい値の自動調整
前節と同様に、このプロジェクトでもマウス操作による ROI の選択と、HSV しきい値の自動調整を行えます。
変更版のコードは cv_6_camshift_auto.py を実行してください。
cd ~/ai-lab-kit/opencv_python
python3 cv_6_camshift_auto.py
プログラムを実行すると、動画の最初のフレームが表示され、マウスで Region of Interest(ROI)を選択するよう求められます。
マウスをドラッグしてターゲット物体を囲む矩形を描き、 Enter または Space を押して確定します。 Esc を押すと選択をキャンセルできます。
ROI を選択すると、 CAMShift Tracker という名前のウィンドウが表示されます。 選択した物体は緑色の回転矩形で追跡され、物体が動くと、追跡ウィンドウは位置・サイズ・向きを自動的に調整します。
プログラムを停止するには:
キーボードの q キーを押す
または表示ウィンドウの閉じるボタン(X)をクリックする
終了すると、動画の再生が停止し、すべての OpenCV ウィンドウが閉じられます。
hsv0 = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
roi_hsv = hsv0[y:y + h, x:x + w]
# Split ROI HSV channels
h_roi = roi_hsv[:, :, 0]
s_roi = roi_hsv[:, :, 1]
v_roi = roi_hsv[:, :, 2]
# Use percentiles to get robust ranges (ignore outliers)
h_low, h_high = np.percentile(h_roi, [5, 95])
s_low, s_high = np.percentile(s_roi, [5, 95])
v_low, v_high = np.percentile(v_roi, [5, 95])
# Add padding so the range is not too tight
pad_h, pad_s, pad_v = 10, 20, 20
lower = np.array([
max(int(h_low) - pad_h, 0),
max(int(s_low) - pad_s, 0),
max(int(v_low) - pad_v, 0)
], dtype=np.uint8)
upper = np.array([
min(int(h_high) + pad_h, 180),
min(int(s_high) + pad_s, 255),
min(int(v_high) + pad_v, 255)
], dtype=np.uint8)
# Mask ONLY the ROI (do not use the whole frame mask)
roi_mask = cv2.inRange(roi_hsv, lower, upper)
...