注釈
こんにちは、SunFounder Raspberry Pi & Arduino & ESP32 Enthusiast Community on Facebookへようこそ!他の愛好家と一緒に、Raspberry Pi、Arduino、ESP32の世界により深く入り込みましょう。
参加する理由
専門家サポート: 購入後の問題や技術的な課題を、コミュニティと私たちのチームの助けを借りて解決します。
学習と共有: ヒントやチュートリアルを交換して、スキルを向上させましょう。
限定プレビュー: 新製品の発表や先行プレビューに早期アクセスできます。
特別割引: 最新製品を特別割引でお楽しみいただけます。
季節限定キャンペーンとプレゼント: プレゼント企画やホリデーキャンペーンに参加しましょう。
👉 一緒に発見し、創造する準備はできましたか? [こちら] をクリックして、今すぐ参加しましょう!
3. リアルタイムカメラキャプチャ
前の章では、ローカルの動画ファイルを読み込み再生する方法を学びました。 この章ではさらに一歩進み、 Raspberry Pi カメラ を使ってリアルタイムで映像を取得し、OpenCV を用いた 色空間変換 を行います。
1. プロジェクトの目的
Picamera2 を使用してカメラのリアルタイムフレームを取得する
カメラ出力を BGRA 形式から BGR 形式へ変換する
OpenCV を使用してリアルタイムプレビューを表示する
異なる色空間の特徴と用途を理解する
2. コードの実行
重要
開始する前に、次の項目を確認してください:
パンチルトが組み立てられている
Raspberry Pi のデスクトップにアクセスできる
コードパッケージがインストールされている
Fusion HAT+ がインストールされ、設定されている
OpenCV がインストールされている
詳細については 0. OpenCV のセットアップ を参照してください。
ターミナルを開き、次のコマンドを入力します:
cd ~/ai-lab-kit/opencv_python python3 cv_3_camera.py
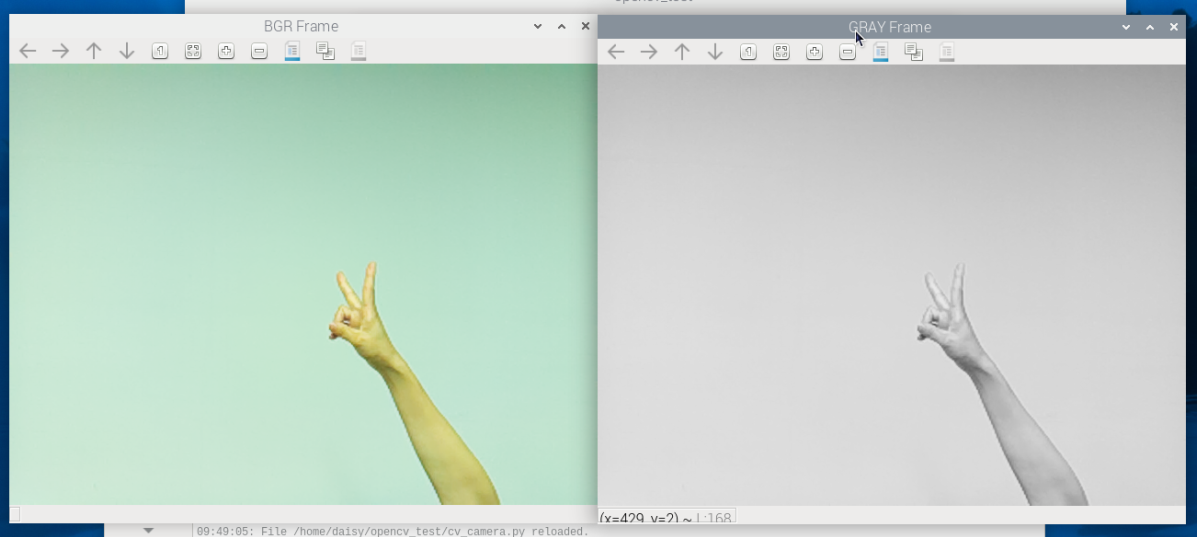
プログラムを実行すると、OpenCV のウィンドウが 2 つ表示されます:
BGR Frame – カメラのカラー映像を表示
GRAY Frame – 同じ映像をグレースケールで表示
プログラムを終了する方法は次の 2 つです:
キーボードの q キーを押す
ウィンドウの閉じるボタン(X)をクリックする
終了すると、カメラのストリーミングが停止し、すべての OpenCV ウィンドウが閉じられます。
3. サンプルコード
以下は、この章で使用する完全な Python サンプルコード( cv_3_camera.py )です:
# Import Picamera2 for Raspberry Pi Camera
from picamera2 import Picamera2
import cv2
import time
# Create a Picamera2 object
picam2 = Picamera2()
# Create a camera configuration
# XRGB8888 is a 4-channel format (similar to BGRA)
# size sets the resolution of the camera frame
config = picam2.create_preview_configuration(
main={"size": (640, 480), "format": "XRGB8888"}
)
# Apply the configuration to the camera
picam2.configure(config)
# Start the camera
picam2.start()
print("Streaming... press 'q' to quit")
# Window names
WINDOW_BGR = "BGR Frame"
WINDOW_GRAY = "GRAY Frame"
while True:
# Capture one frame as a NumPy array (BGRA-like format)
frame_bgra = picam2.capture_array()
# Convert BGRA to BGR for normal color display
frame_bgr = cv2.cvtColor(frame_bgra, cv2.COLOR_BGRA2BGR)
# Convert BGRA directly to grayscale
frame_gray = cv2.cvtColor(frame_bgra, cv2.COLOR_BGRA2GRAY)
# Display the color and grayscale frames
cv2.imshow(WINDOW_BGR, frame_bgr)
cv2.imshow(WINDOW_GRAY, frame_gray)
# Process GUI events and check keyboard input
# Press 'q' to exit the loop
key = cv2.waitKey(1) & 0xFF
if key == ord("q"):
break
# Exit if the user closes any OpenCV window
if (cv2.getWindowProperty(WINDOW_BGR, cv2.WND_PROP_VISIBLE) < 1 or
cv2.getWindowProperty(WINDOW_GRAY, cv2.WND_PROP_VISIBLE) < 1):
break
# Optional: limit frame rate to reduce CPU usage (about 30 FPS)
time.sleep(1 / 30)
# Stop the camera
picam2.stop()
# Close all OpenCV windows
cv2.destroyAllWindows()
4. コードの解説
必要なライブラリをインポートします:
from picamera2 import Picamera2 import cv2 import time
Picamera2 は Raspberry Pi カメラからフレームを取得するために使用し、OpenCV は画像の変換と表示に使用します。
Picamera2 オブジェクトを作成し、カメラを設定します:
picam2 = Picamera2() config = picam2.create_preview_configuration( main={"size": (640, 480), "format": "XRGB8888"} ) picam2.configure(config) picam2.start()
これにより、カメラは 640×480 の解像度で動作します。
XRGB8888は 4 チャンネル形式のため、取得されるフレームは BGRA に近い形式になります。NumPy 配列としてフレームを取得します:
frame_bgra = picam2.capture_array()
ループごとにカメラから 1 フレームを取得します。
表示用にフレームを変換します:
frame_bgr = cv2.cvtColor(frame_bgra, cv2.COLOR_BGRA2BGR) frame_gray = cv2.cvtColor(frame_bgra, cv2.COLOR_BGRA2GRAY)
frame_bgrは通常のカラー表示用です。frame_grayは同じフレームのグレースケール版です。
2 つのウィンドウに表示します:
cv2.imshow(WINDOW_BGR, frame_bgr) cv2.imshow(WINDOW_GRAY, frame_gray)
OpenCV のウィンドウが 2 つ開き、1 つはカラー映像、もう 1 つはグレースケール映像を表示します。
終了条件(
qキーまたはウィンドウを閉じる):key = cv2.waitKey(1) & 0xFF if key == ord("q"): break if (cv2.getWindowProperty(WINDOW_BGR, cv2.WND_PROP_VISIBLE) < 1 or cv2.getWindowProperty(WINDOW_GRAY, cv2.WND_PROP_VISIBLE) < 1): break
qキーを押すとプログラムを終了します。どちらかのウィンドウを閉じても安全に終了します。
FPS を制限して CPU 使用率を抑える:
time.sleep(1 / 30)
小さな待機時間を入れることで、ループを約 30 FPS で実行し、Raspberry Pi の CPU 負荷を軽減できます。
カメラを停止し、OpenCV ウィンドウを閉じます:
picam2.stop() cv2.destroyAllWindows()
プログラム終了前にカメラを解放し、すべての OpenCV ウィンドウを閉じます。
5. 色空間変換の重要性
カメラから出力される生の画像形式は、OpenCV が処理に使用する形式と必ずしも一致するとは限りません。 この例では、Picamera2 は XRGB8888(BGRA) 形式で画像を出力しますが、OpenCV では主に BGR 形式が使用されます。
そのため、次のように画像を変換する必要があります:
frame_bgr = cv2.cvtColor(frame_bgra, cv2.COLOR_BGRA2BGR)
これにより、画像のチャンネル順序が OpenCV の標準である BGR 形式になり、正しく表示・処理できるようになります。
さらに、画像をグレースケールへ変換することもできます:
frame_gray = cv2.cvtColor(frame_bgr, cv2.COLOR_BGR2GRAY)
これにより、カメラから取得した画像を OpenCV の画像処理ワークフローに適した形式へ変換できます。
代表的な色空間と用途
Color Space |
Characteristics |
Typical Use Cases |
|---|---|---|
BGR |
OpenCV の標準フォーマット |
画像表示、基本処理、エッジ検出 |
RGB |
人間の知覚に近い色表現 |
可視化、ディープラーニングの入力画像 |
GRAY |
単一チャンネルのグレースケール画像 |
物体検出、エッジ検出、処理速度の最適化 |
HSV |
色相と明るさを分離 |
色検出、物体追跡、セグメンテーション |
YCrCb |
輝度と色差を分離 |
顔検出、動画圧縮、照明変化への耐性 |
例えば、 HSV は 色検出や物体追跡 に適しており、 YCrCb は 顔認識や照明条件が変化するシーン に強い特徴があります。
6. 拡張と練習
BGR から GRAY や HSV への変換を試し、結果を観察してみましょう。
例えば次のように使用します:
cv2.cvtColor(frame_bgr, cv2.COLOR_BGR2RGB)cv2.cvtColor(frame_bgr, cv2.COLOR_BGR2HSV)その他
異なる解像度(例:1280×720)を試し、遅延やフレームレートへの影響を確認してみましょう。
前章の動画再生コードと組み合わせて、カメラ映像と動画ソースを切り替える機能を実装してみましょう。