注釈
こんにちは、SunFounder Raspberry Pi & Arduino & ESP32 Enthusiast Community on Facebookへようこそ!他の愛好家と一緒に、Raspberry Pi、Arduino、ESP32の世界により深く入り込みましょう。
参加する理由
専門家サポート: 購入後の問題や技術的な課題を、コミュニティと私たちのチームの助けを借りて解決します。
学習と共有: ヒントやチュートリアルを交換して、スキルを向上させましょう。
限定プレビュー: 新製品の発表や先行プレビューに早期アクセスできます。
特別割引: 最新製品を特別割引でお楽しみいただけます。
季節限定キャンペーンとプレゼント: プレゼント企画やホリデーキャンペーンに参加しましょう。
👉 一緒に発見し、創造する準備はできましたか? [こちら] をクリックして、今すぐ参加しましょう!
5. MeanShift による物体追跡
MeanShift は、ヒストグラムに基づく古典的な物体追跡アルゴリズムです。 このレッスンでは、完全な MeanShift 追跡 の実装例を示すだけでなく、 なぜ 各手順を行うのか、そして内部で 何が起きているのか も説明します。
1. MeanShift とは?
MeanShift は、確率密度に基づいてウィンドウを反復的に移動させ、 ターゲットが最も存在しそうな位置 を見つけるアルゴリズムです。
簡単に言えば、 まずアルゴリズムに「初期ターゲット領域」を与えます。すると、その領域の色情報(たとえばターゲットの色ヒストグラム)を計算し、以降の各フレームで、その色に最も近い領域を探して矩形をそこへ移動させます。
この処理はディープラーニングに依存せず、事前学習も不要なため、とても軽量です。
2. コードの実行
重要
開始する前に、次の項目を確認してください:
パンチルトが組み立てられている
Raspberry Pi のデスクトップにアクセスできる
コードパッケージがインストールされている
Fusion HAT+ がインストールされ、設定されている
OpenCV がインストールされている
詳細については 0. OpenCV のセットアップ を参照してください。
ターミナルを開き、次のコマンドを入力します:
cd ~/ai-lab-kit/opencv_python python3 cv_5_meanshift.py
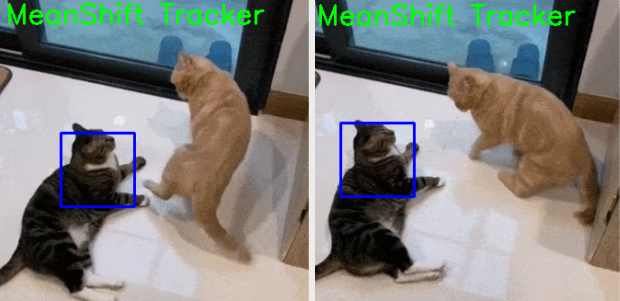
プログラムを実行すると、 MeanShift Tracker という名前の OpenCV ウィンドウが表示され、動画ファイル
sample2.mp4の再生が始まります。ターゲット物体の周囲には緑色の矩形が描画され、MeanShift 追跡アルゴリズムによってリアルタイムで更新されます。
動画内で物体が移動すると、その追跡ウィンドウも一緒に移動します。
プログラムを終了する方法は 2 つあります:
キーボードの q キーを押す
ウィンドウの閉じるボタン(X)をクリックして閉じる
終了すると、動画の再生が停止し、すべての OpenCV ウィンドウが閉じられます。
3. 完全なコード
以下は、MeanShift 追跡スクリプト( cv_5_meanshift.py )の完全なコードです:
import numpy as np
import cv2
cap = cv2.VideoCapture("sample2.mp4")
# Read the first frame
ret, frame = cap.read()
if not ret:
raise RuntimeError("Cannot read the video file.")
# Initial tracking window (x, y, w, h)
x, y, w, h = 80, 100, 80, 80
track_window = (x, y, w, h)
# Convert the first frame to HSV
hsv_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# Extract ROI in HSV (ONLY the selected area)
roi_hsv = hsv_frame[y:y+h, x:x+w]
# Create a mask for ROI (filter out low saturation/value pixels)
roi_mask = cv2.inRange(
roi_hsv,
np.array((0, 61, 33), dtype=np.uint8),
np.array((180, 255, 255), dtype=np.uint8)
)
# Compute histogram of ROI (Hue channel)
roi_hist = cv2.calcHist([roi_hsv], [0], roi_mask, [180], [0, 180])
# Normalize histogram for better tracking
cv2.normalize(roi_hist, roi_hist, 0, 255, cv2.NORM_MINMAX)
# Termination criteria: max 15 iterations or move by at least 2 pixels
termination = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 15, 2)
# FPS settings (fallback if FPS is unavailable)
fps = cap.get(cv2.CAP_PROP_FPS)
if not fps or fps <= 1e-3:
fps = 30.0
delay_ms = int(1000 / fps)
WINDOW_NAME = "MeanShift Tracker"
while True:
ret, frame = cap.read()
# Loop video
if not ret:
cap.set(cv2.CAP_PROP_POS_FRAMES, 0)
continue
# Convert frame to HSV
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# Back projection: probability map of where the ROI histogram appears in the frame
bp = cv2.calcBackProject([hsv], [0], roi_hist, [0, 180], scale=1)
# Apply meanShift to update tracking window
_, track_window = cv2.meanShift(bp, track_window, termination)
# Draw tracking window
x, y, w, h = track_window
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.putText(frame, "MeanShift Tracker", (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow(WINDOW_NAME, frame)
# Handle keyboard input and GUI events
key = cv2.waitKey(delay_ms) & 0xFF
if key == ord("q"):
break
# Exit if window is closed
if cv2.getWindowProperty(WINDOW_NAME, cv2.WND_PROP_VISIBLE) < 1:
break
cap.release()
cv2.destroyAllWindows()
4. 解説
動画ファイルを開く:
cap = cv2.VideoCapture("sample2.mp4")
これにより動画キャプチャオブジェクトが作成され、OpenCV がファイルからフレームを読み込めるようになります。
最初のフレームを読み込み、正常に取得できたか確認する:
ret, frame = cap.read() if not ret: raise RuntimeError("Cannot read the video file.")
MeanShift で追跡を始めるには、まず最初のフレームから追跡対象を学習する必要があります。
初期追跡ウィンドウ(追跡したい物体)を設定する:
x, y, w, h = 80, 100, 80, 80 track_window = (x, y, w, h)
この矩形はターゲット(ROI)の初期位置です。 通常は、最初のフレーム内の対象物に合わせてこれらの値を調整します。
最初のフレームを HSV に変換し、ROI を取り出す:
hsv_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) roi_hsv = hsv_frame[y:y+h, x:x+w]
HSV は、RGB/BGR よりも Hue(色相)チャンネルで色を安定して表現できるため、追跡によく使われます。
ROI 内の弱い画素や無効な画素を無視するためにマスクを作る:
roi_mask = cv2.inRange( roi_hsv, np.array((0, 61, 33), dtype=np.uint8), np.array((180, 255, 255), dtype=np.uint8) )
これにより、彩度や明度が極端に低い画素(影やノイズになりやすい部分)が除外され、追跡の安定性が向上します。
ROI のヒストグラム(Hue チャンネル)を計算し、正規化する:
roi_hist = cv2.calcHist([roi_hsv], [0], roi_mask, [180], [0, 180]) cv2.normalize(roi_hist, roi_hist, 0, 255, cv2.NORM_MINMAX)
ヒストグラムはターゲットの色分布(Hue)を表します。
正規化によって、照明の違いや ROI サイズの違いがあっても比較しやすくなります。
MeanShift の終了条件を定義する:
termination = (cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 15, 2)
MeanShift は次のいずれかで停止します: - 15 回繰り返したとき - ウィンドウの移動量が 2 ピクセル未満になったとき
動画の FPS に基づいて再生待機時間を設定する:
fps = cap.get(cv2.CAP_PROP_FPS) if not fps or fps <= 1e-3: fps = 30.0 delay_ms = int(1000 / fps)
これにより、再生速度が元の動画に近くなるよう調整されます。 FPS を取得できない場合は、30 FPS を既定値として使います。
各フレームを HSV に変換する(追跡のため):
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
追跡は HSV 空間で行われ、ターゲットの Hue ヒストグラムとの一致を利用します。
バックプロジェクション(ターゲット色が存在しそうな場所を求める):
bp = cv2.calcBackProject([hsv], [0], roi_hist, [0, 180], scale=1)
バックプロジェクションは確率マップを生成します。 明るい領域ほど、ROI のヒストグラムに近い可能性が高いことを示します。
MeanShift を使って追跡ウィンドウを更新する:
_, track_window = cv2.meanShift(bp, track_window, termination)
MeanShift は、確率マップの中で密度が最も高い方向へ追跡ウィンドウを移動し、フレームごとにターゲット位置を更新します。
追跡結果を描画する:
x, y, w, h = track_window cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
これにより、現在の追跡矩形が動画フレーム上に描画されます。
ウィンドウ表示と終了条件:
key = cv2.waitKey(delay_ms) & 0xFF if key == ord("q"): break if cv2.getWindowProperty(WINDOW_NAME, cv2.WND_PROP_VISIBLE) < 1: break
qを押すと終了します。ウィンドウを閉じても安全に終了します。
リソースを解放する:
cap.release() cv2.destroyAllWindows()
システムリソースを解放するため、必ず動画を閉じてウィンドウを破棄してください。
5. MeanShift と CAMShift の比較
Feature |
MeanShift |
CAMShift |
|---|---|---|
Window size |
固定 |
自動調整(ターゲットのスケールに追従) |
Rotating target |
非対応 |
対応 |
Suitable scenarios |
ターゲットサイズが比較的安定している場合 |
ターゲットが拡大縮小・回転する可能性がある場合 |
Applications |
シンプルな追跡、ボール、マーカー |
実用的な追跡、監視、認識 |
6. 応用: マウスで ROI を選択する
これまでは、次のように固定値を使っていました:
x, y, w, h = 150, 200, 80, 80
これは簡単ですが、柔軟性に欠けます。 動画を変えたり、ターゲットの初期位置が異なったりすると、コードを書き換える必要があります。
OpenCV には cv2.selectROI が用意されており、最初のフレーム上でマウスを使ってターゲット領域を対話的に選択 できます。すると、プログラムが自動的に (x, y, w, h) を取得します。
初期化コードの変更版
変更後のコードは cv_5_meanshift_auto.py を実行してください。
cd ~/ai-lab-kit/opencv_python
python3 cv_5_meanshift_auto.py
import numpy as np
import cv2
from pathlib import Path
# -----------------------------
# Load video
# -----------------------------
BASE_DIR = Path(__file__).resolve().parent
video_path = str(BASE_DIR / "sample3.mp4")
cap = cv2.VideoCapture(video_path)
if not cap.isOpened():
raise RuntimeError("Error opening video file")
# Read the first frame (needed for ROI selection and building the target model)
ret, frame = cap.read()
if not ret:
raise RuntimeError("Cannot read the first frame from the video")
# -----------------------------
# Select ROI with mouse
# -----------------------------
# Press Enter/Space to confirm, press Esc to cancel
roi_box = cv2.selectROI("Select ROI", frame, fromCenter=False, showCrosshair=True)
cv2.destroyWindow("Select ROI")
...
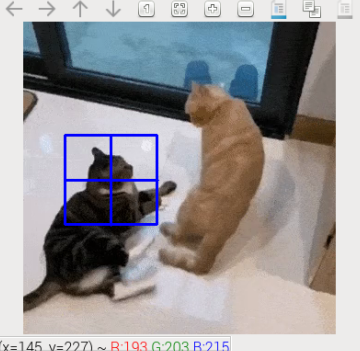
プログラムを実行すると、動画の最初のフレームが表示され、マウスで ROI(関心領域)を選択するよう求められます。
マウスをドラッグしてターゲット物体を囲む矩形を描き、 Enter または Space を押して選択を確定します。 Esc を押すと選択をキャンセルできます。
ROI を確定すると、 MeanShift Tracker という名前のウィンドウが表示されます。 選択した物体は緑色のバウンディングボックスで追跡され、動画内で動くとその矩形も一緒に移動します。
プログラムを停止するには:
キーボードの q キーを押す
または表示ウィンドウを閉じるボタン(X)で閉じる
終了すると、動画の再生が停止し、すべての OpenCV ウィンドウが閉じられます。
Notes
cv2.selectROI は、OpenCV に標準搭載されている対話型 ROI 選択機能で、手動初期化に最適です。
戻り値は (x, y, w, h) で、 track_window と完全に互換性があるため、CAMShift/MeanShift のメインロジックを変更する必要はありません。
これにより、同じプログラムを異なる動画や異なるターゲットに再利用できます。
7. 応用 II: ROI に対する HSV しきい値を動的に計算する
元の cv_5_meanshift.py では、HSV のしきい値を手動で設定しています。これは、ターゲット色が固定されており、照明条件も安定している場合に適しています。
# apply mask on the HSV frame
roi_mask = cv2.inRange(roi_hsv, lower, upper)
照明が大きく変化したり、ターゲット色が固定でなかったりする場合、固定の inRange 境界は最適ではないことがあります。
そこで、より賢い方法として、 選択した ROI から HSV の lower / upper 境界を自動計算する 方法があります。
例: HSV しきい値の自動計算
変更後のコードは cv_5_meanshift_auto.py を実行してください。
cd ~/ai-lab-kit/opencv_python
python3 cv_5_meanshift_auto.py
hsv0 = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
roi_hsv = hsv0[y:y + h, x:x + w]
# Split ROI HSV channels
h_roi = roi_hsv[:, :, 0]
s_roi = roi_hsv[:, :, 1]
v_roi = roi_hsv[:, :, 2]
# Use percentiles to get robust ranges (ignore outliers)
h_low, h_high = np.percentile(h_roi, [5, 95])
s_low, s_high = np.percentile(s_roi, [5, 95])
v_low, v_high = np.percentile(v_roi, [5, 95])
# Add padding so the range is not too tight
pad_h, pad_s, pad_v = 10, 20, 20
lower = np.array([
max(int(h_low) - pad_h, 0),
max(int(s_low) - pad_s, 0),
max(int(v_low) - pad_v, 0)
], dtype=np.uint8)
upper = np.array([
min(int(h_high) + pad_h, 180),
min(int(s_high) + pad_s, 255),
min(int(v_high) + pad_v, 255)
], dtype=np.uint8)
# Mask ONLY the ROI (do not use the whole frame mask)
roi_mask = cv2.inRange(roi_hsv, lower, upper)
暗いターゲットや明るいターゲットを選んだ場合でも、手動でしきい値を微調整する必要がなくなり、照明や色の違いにも素早く適応できます。
注釈
np.percentile(5%–95%)は、ROI 内の極端な値(境界、影、ハイライトなど)を除外できるため、頑健性が向上します。pad_h,pad_s,pad_vは許容範囲を持たせるための余裕であり、軽微な色変化も捉えられるようにします。lowerとupperは、cv2.inRangeで直接使用される動的な HSV 範囲です。
Summary
cv2.selectROIを使うことで、柔軟にターゲットを初期化できます。np.percentileを使えば、適応性の高い HSV 範囲を自動計算できます。cv2.inRangeと CAMShift / MeanShift を組み合わせることで、照明変化やターゲットの違いがあっても安定した追跡を実現できます。