注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
3.3 障害物を検出する¶
このモジュールは、前方の障害物の存在を判断するために、車やロボットに一般的に取り付けられています。また、ハンドヘルドデバイスや水道蛇口など、幅広い用途で使用されています。
必要な部品
このプロジェクトには、以下の部品が必要です。
全体のキットを購入すると非常に便利です。こちらがリンクです:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
3 in 1 Starter Kit |
380+ |
以下のリンクから個別に購入することもできます。
コンポーネント紹介 |
購入リンク |
|---|---|
回路図
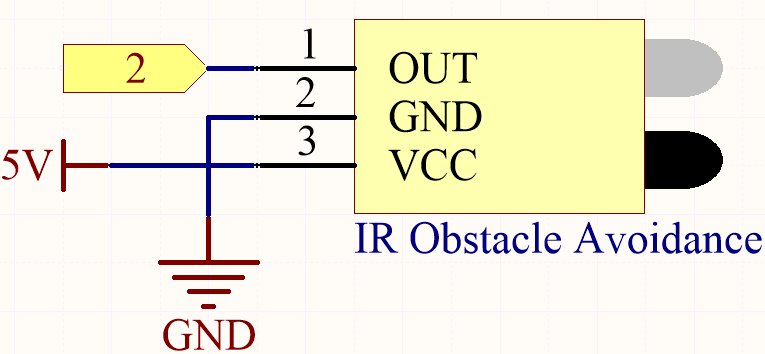
デジタルピン2は、IR障害物回避モジュールの信号を読み取るために使用されます。IRセンサーモジュールのVCCを5Vに、GNDをGNDに、OUTをデジタルピン2に接続します。
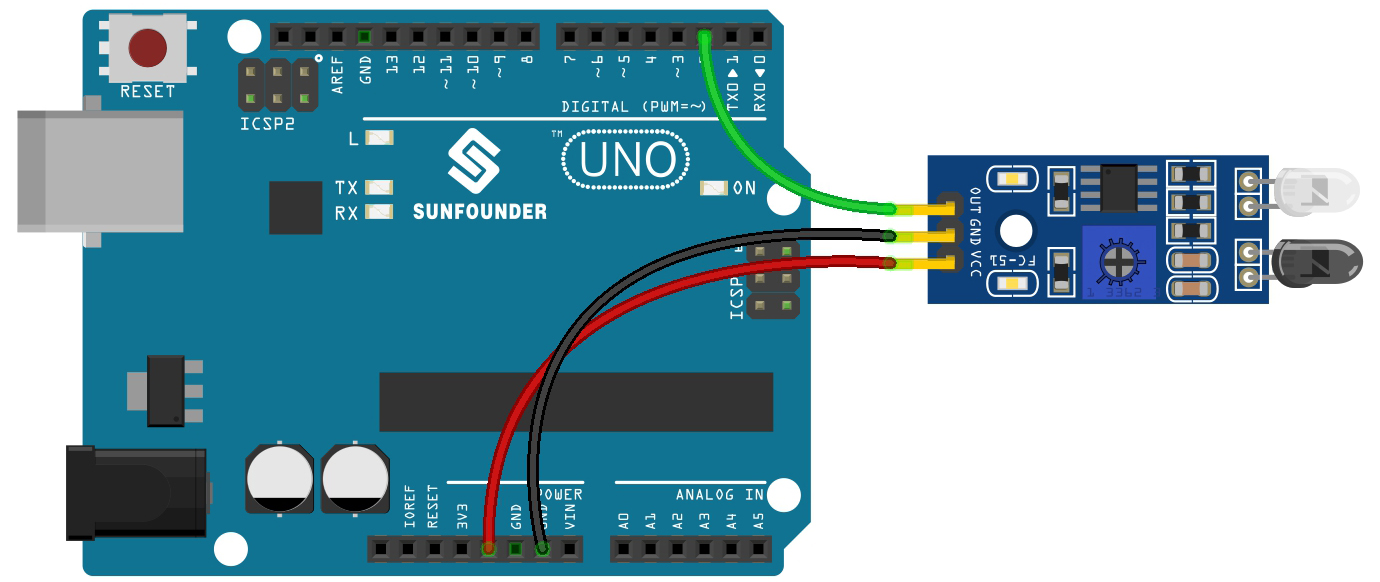
配線図
コード
注釈
3in1-kit\basic_project\3.3.detect_the_obstacleのパスの下で3.3.detect_the_obstacle.inoファイルを開くことができます。または、このコードを Arduino IDE にコピーします。
または、 Arduino Web Editor を通じてコードをアップロードします。
IR障害物回避モジュールが前方に何か障害物を検出すると、シリアルモニターに[0]が表示されます。それ以外の場合は、[1]が表示されます。