Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [ ici ] et rejoignez-nous aujourd’hui !
6.4 Aide au Stationnement¶
Avec le développement de la science et de la technologie, de nombreux produits de haute technologie ont été installés dans les voitures, parmi lesquels le système d’aide au stationnement en marche arrière est l’un d’eux. Ici, nous utilisons un module ultrasonique, un LCD, des LED et un buzzer pour réaliser un système simple d’aide au stationnement ultrasonique.
Composants requis
Pour ce projet, nous aurons besoin des composants suivants.
Il est certainement pratique d’acheter un kit complet, voici le lien :
Nom |
ÉLÉMENTS DE CE KIT |
LIEN |
|---|---|---|
3 in 1 Starter Kit |
380+ |
Vous pouvez également les acheter séparément via les liens ci-dessous.
INTRODUCTION DES COMPOSANTS |
LIEN D’ACHAT |
|---|---|
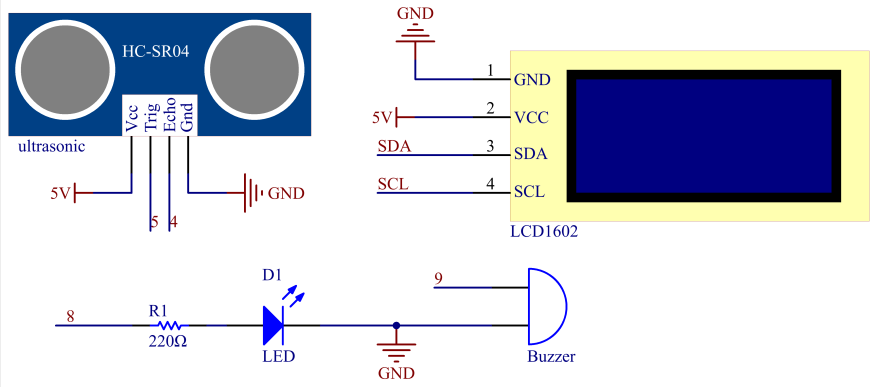
Schéma
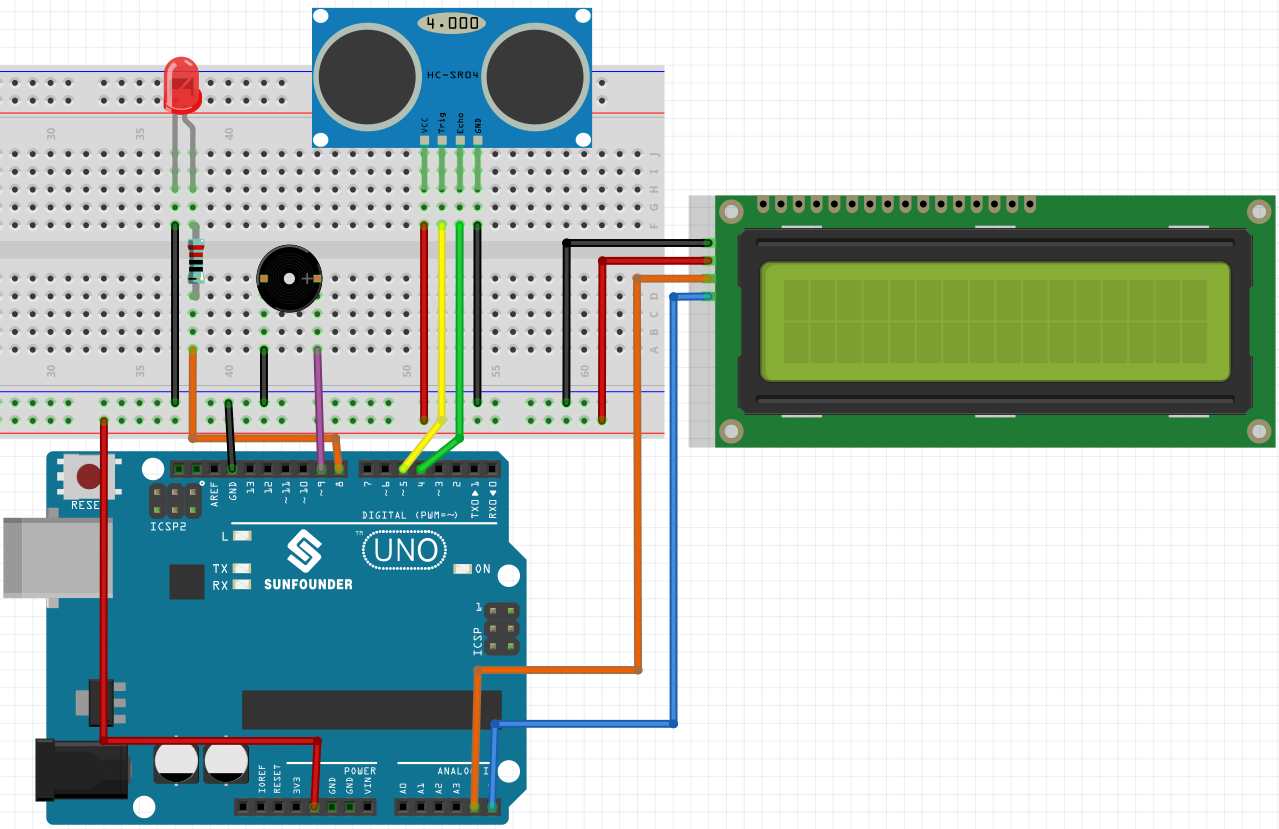
Câblage
Code
Note
Vous pouvez ouvrir le fichier
6.4_reversingAid.inosous le chemin de3in1-kit\basic_project\6.4_reversingAiddirectement.Ou copiez ce code dans Arduino IDE .
La bibliothèque
LiquidCrystal I2Cest utilisée ici, vous pouvez l’installer depuis le Library Manager.
Après le téléchargement réussi du code, la distance détectée actuelle sera affichée sur le LCD. Ensuite, le buzzer changera la fréquence de son en fonction des différentes distances.
Note
Si le code et le câblage sont corrects, mais que le LCD n’affiche toujours pas de contenu, vous pouvez tourner le potentiomètre à l’arrière.
Comment ça fonctionne ?
Ce code nous aide à créer un dispositif simple de mesure de distance capable de mesurer la distance entre des objets et de fournir un retour via un affichage LCD et un buzzer.
La fonction loop() contient la logique principale du programme et s’exécute en continu. Examinons de plus près la fonction loop().
Boucle pour lire la distance et mettre à jour les paramètres
Dans le
loop, le code lit d’abord la distance mesurée par le module ultrasonique et met à jour le paramètre d’intervalle en fonction de la distance.// Update the distance distance = readDistance(); // Update intervals based on distance if (distance <= 10) { intervals = 300; } else if (distance <= 20) { intervals = 500; } else if (distance <= 50) { intervals = 1000; } else { intervals = 2000; }
Vérifier s’il est temps de biper
Le code calcule la différence entre l’heure actuelle et l’heure du bip précédent, et si la différence est supérieure ou égale au temps d’intervalle, il déclenche le buzzer et met à jour l’heure du bip précédent.
unsigned long currentMillis = millis(); if (currentMillis - previousMillis >= intervals) { Serial.println("Beeping!"); beep(); previousMillis = currentMillis; }
Mettre à jour l’affichage LCD
Le code efface l’affichage LCD puis affiche « Dis: » et la distance actuelle en centimètres sur la première ligne.
lcd.clear(); lcd.setCursor(0, 0); lcd.print("Dis: "); lcd.print(distance); lcd.print(" cm"); delay(100);