注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
10. ワンタッチスタート¶
このプロジェクトでは、これまでのプロジェクト - ライン追従、追跡、障害物回避、自動運転などを統合しました。リモコンのボタンで切り替えが可能で、車をスタートさせて一度にすべての機能を体験することができます。
配線図

コード
注釈
パス
3in1-kit\car_project\10.one_touch_startの下の10.one_touch_start.inoファイルを開きます。または、このコードを Arduino IDE にコピーします。
ここで
IRremoteライブラリが使用されています。 Library Manager からインストールできます。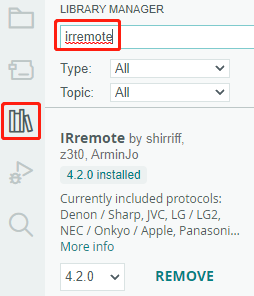
コードが正常にアップロードされた後、IRレシーバがリモコンからの信号を受信するたびにLEDが3回高速で点滅します。以下のキーを押してカートを操作できます。
+: 加速
-: 減速
1: 左前に移動
2: 前進
3: 右に移動
4: 左折
6: 右折
7: 左に後退
8: 後退。
9: 右に後退
CYCLE: ラインを追跡
U/SD: 自動運転
▷▷|: 超音波モジュールを使用した障害物回避
|◁◁: IR障害物モジュールを使用した障害物回避
EQ: あなたの手を追跡
0: 停止