Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
3.3 Hindernis erkennen¶
Dieses Modul wird häufig in Autos und Robotern installiert, um das Vorhandensein von Hindernissen vor ihnen zu erkennen. Zudem wird es weit verbreitet in Handgeräten, Wasserhähnen und dergleichen verwendet.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein komplettes Set zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
3 in 1 Starter Kit |
380+ |
Sie können sie auch separat über die untenstehenden Links kaufen.
KOMPONENTENBESCHREIBUNG |
KAUF-LINK |
|---|---|
- |
|
Schaltplan
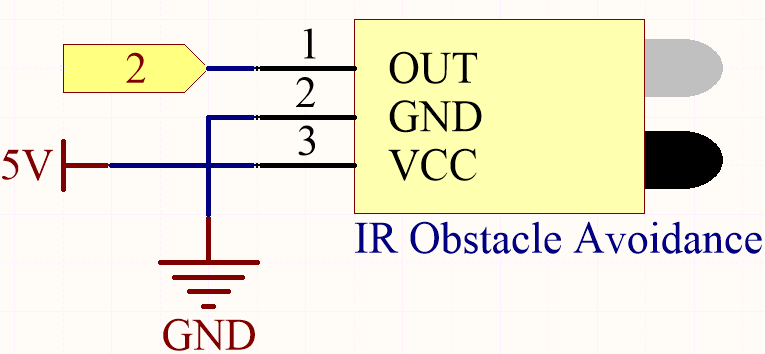
Der digitale Pin 2 wird verwendet, um das Signal des IR-Hindernisvermeidungsmoduls zu lesen. Der VCC des IR-Sensor-Moduls wird an 5V angeschlossen, GND an GND und OUT an den digitalen Pin 2.
Verdrahtung

Code
Bemerkung
Sie können die Datei
3.3.detect_the_obstacle.inoim Pfad3in1-kit\learning_project\3.3.detect_the_obstacleöffnen.Oder kopieren Sie diesen Code in die Arduino IDE.
Wenn das IR-Hindernisvermeidungsmodul etwas registriert, das sich direkt davor befindet, wird [0] im seriellen Monitor angezeigt, andernfalls wird [1] dargestellt.