Nota
Ciao, benvenuto nella SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community su Facebook! Approfondisci l’esplorazione del Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra comunità e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Accedi in anteprima agli annunci di nuovi prodotti e alle anticipazioni esclusive.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni e omaggi festivi: Partecipa a omaggi e promozioni speciali durante le festività.
👉 Sei pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
2.2.8 Modulo Sensore Ultrasonico
Introduzione
Il sensore ultrasonico utilizza ultrasuoni per rilevare con precisione gli oggetti e misurare le distanze. Emette onde ultrasoniche e le converte in segnali elettronici.
Componenti necessari
In questo progetto avremo bisogno dei seguenti componenti.
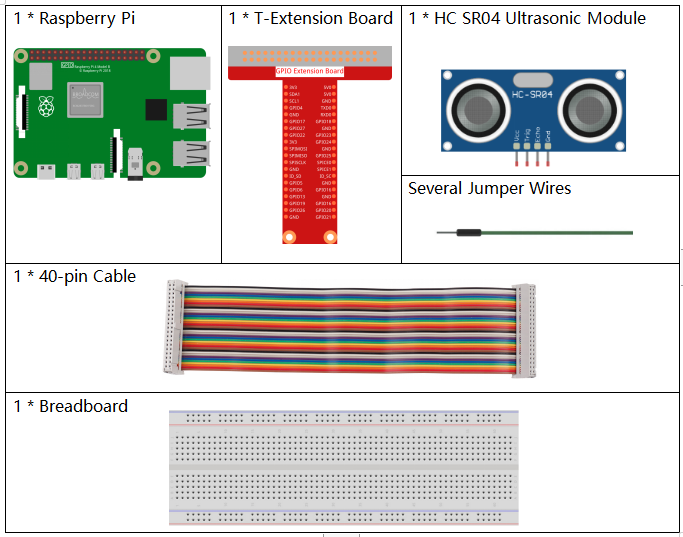
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
Kit Raphael |
337 |
Puoi anche acquistarli separatamente dai link sottostanti.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
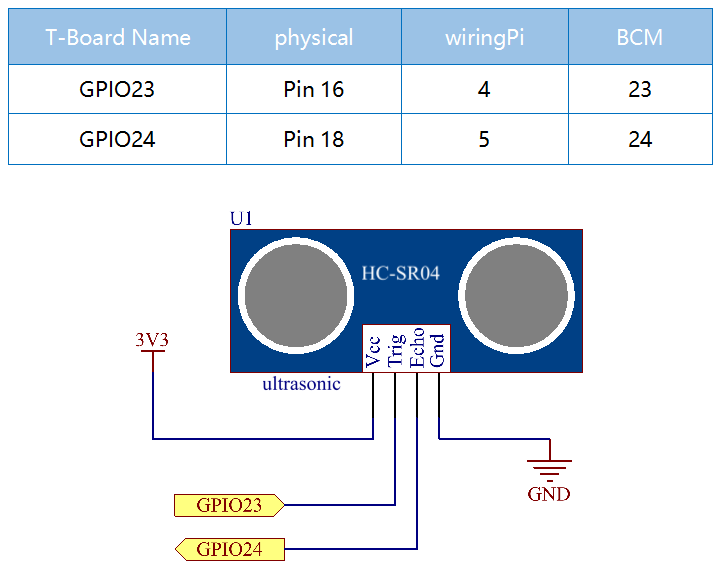
Schema elettrico
Procedura sperimentale
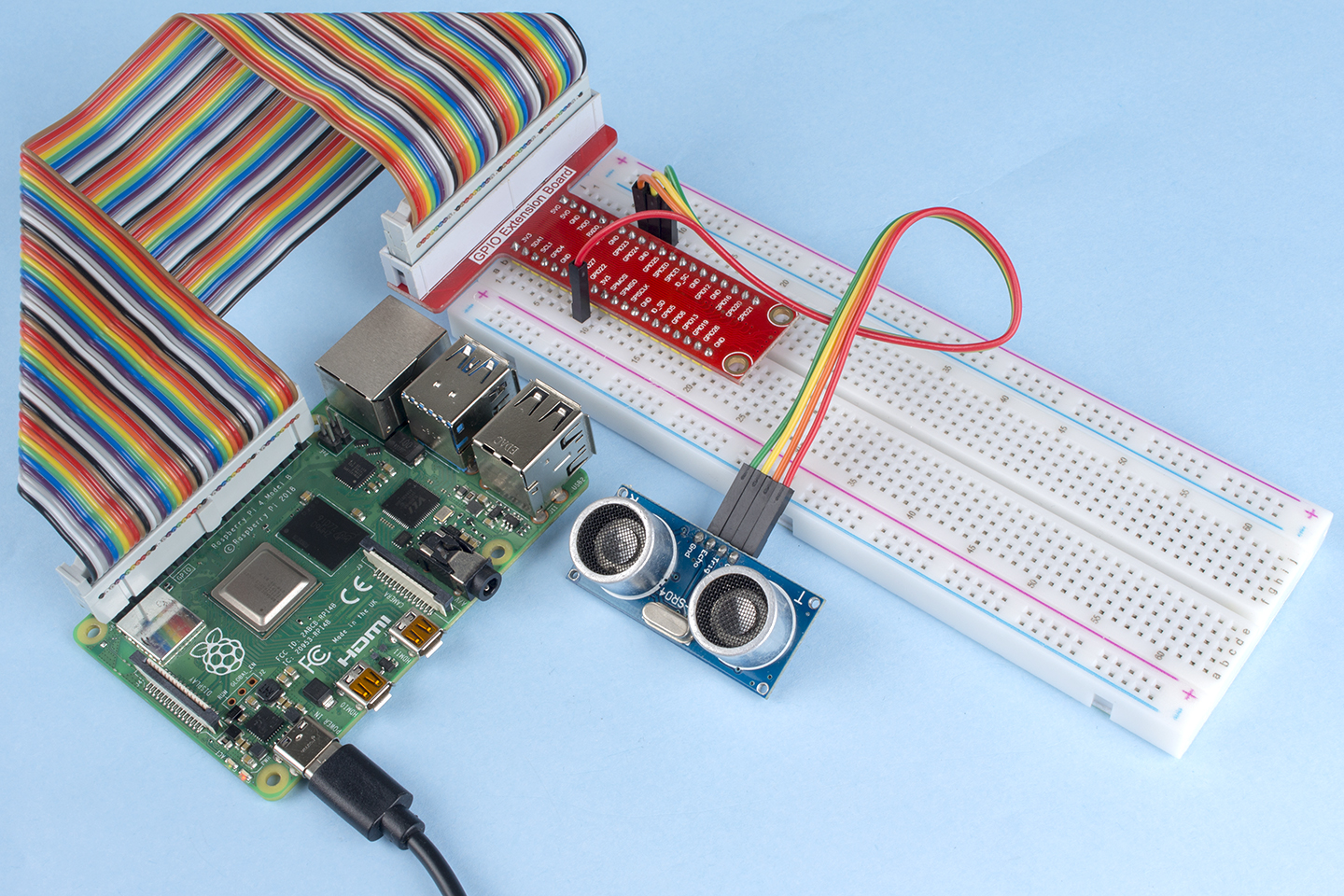
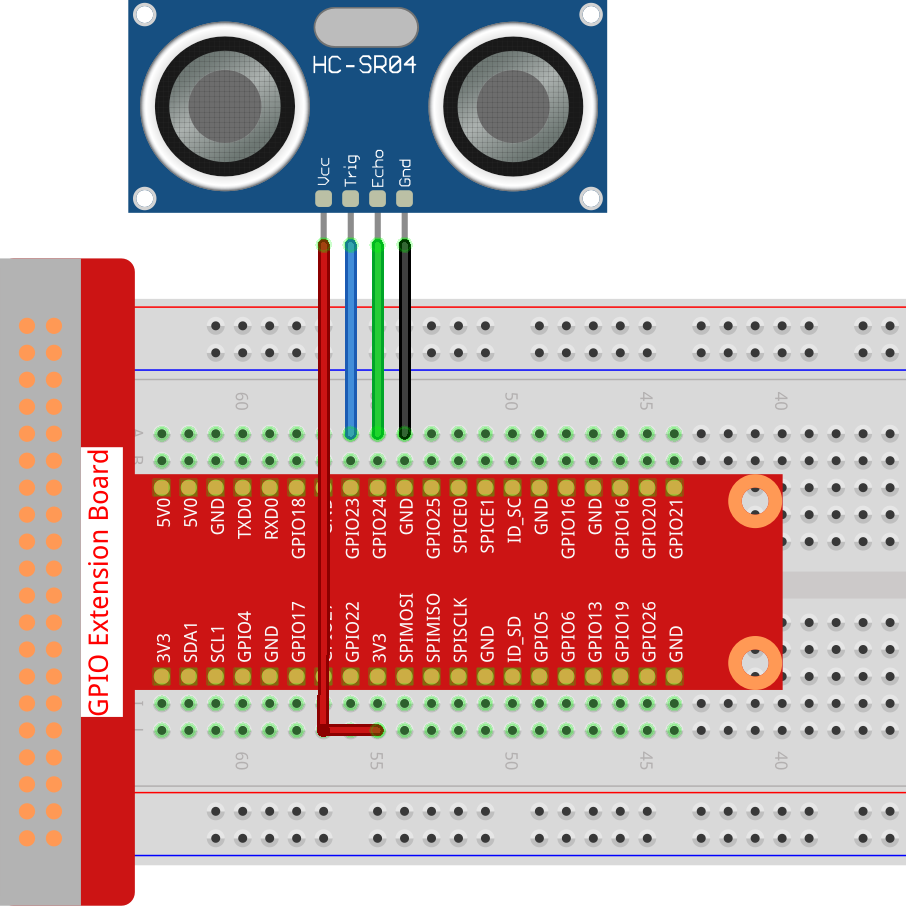
Passo 1: Costruisci il circuito.
Passo 2: Vai nella cartella del codice.
cd ~/raphael-kit/python/
Passo 3: Esegui il file eseguibile.
sudo python3 2.2.8_Ultrasonic.py
Una volta eseguito il codice, il modulo del sensore ultrasonico rileva la distanza tra l’ostacolo davanti e il modulo stesso, quindi il valore della distanza verrà stampato sullo schermo.
Codice
Nota
Puoi Modificare/Resettare/Copiare/Eseguire/Fermare il codice qui sotto. Ma prima di farlo, devi andare nel percorso del codice sorgente, come raphael-kit/python. Dopo aver modificato il codice, puoi eseguirlo direttamente per vedere l’effetto.
import RPi.GPIO as GPIO
import time
TRIG = 16
ECHO = 18
def setup():
GPIO.setmode(GPIO.BOARD)
GPIO.setup(TRIG, GPIO.OUT)
GPIO.setup(ECHO, GPIO.IN)
def distance():
GPIO.output(TRIG, 0)
time.sleep(0.000002)
GPIO.output(TRIG, 1)
time.sleep(0.00001)
GPIO.output(TRIG, 0)
while GPIO.input(ECHO) == 0:
a = 0
time1 = time.time()
while GPIO.input(ECHO) == 1:
a = 1
time2 = time.time()
during = time2 - time1
return during * 340 / 2 * 100
def loop():
while True:
dis = distance()
print ('Distance: %.2f' % dis )
time.sleep(0.3)
def destroy():
GPIO.cleanup()
if __name__ == "__main__":
setup()
try:
loop()
except KeyboardInterrupt:
destroy()
Spiegazione del Codice
def distance():
Questa funzione serve a realizzare la funzionalità del sensore ultrasonico calcolando la distanza di rilevamento.
GPIO.output(TRIG, 1)
time.sleep(0.00001)
GPIO.output(TRIG, 0)
Questo codice invia un impulso ultrasonico di 10 µs.
while GPIO.input(ECHO) == 0:
a = 0
time1 = time.time()
Questo ciclo vuoto serve per assicurarsi che, quando viene inviato il segnale di trigger, non ci sia un segnale di eco interferente, dopodiché viene acquisito il tempo corrente.
while GPIO.input(ECHO) == 1:
a = 1
time2 = time.time()
Questo ciclo vuoto serve per assicurarsi che il passo successivo non venga eseguito fino a quando non viene ricevuto il segnale di eco, dopodiché viene acquisito il tempo corrente.
during = time2 - time1
Esegue il calcolo dell’intervallo di tempo.
return during * 340 / 2 * 100
La distanza viene calcolata in base all’intervallo di tempo e alla velocità di propagazione del suono. La velocità del suono nell’aria: 340 m/s.
Immagine del fenomeno