Nota
Ciao, benvenuto nella SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra comunità e del nostro team.
Impara e Condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato a nuovi annunci di prodotti e anteprime esclusive.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni durante le festività.
👉 Pronto per esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
2.2.9 Modulo MPU6050
Introduzione
Il MPU-6050 è il primo e unico dispositivo di tracciamento del movimento a 6 assi al mondo (giroscopio a 3 assi e accelerometro a 3 assi) progettato per smartphone, tablet e sensori indossabili che richiedono queste caratteristiche, tra cui basso consumo energetico, basso costo e alte prestazioni.
In questo esperimento, utilizziamo I2C per ottenere i valori del sensore di accelerazione a tre assi e del giroscopio a tre assi del MPU6050 e visualizzarli sullo schermo.
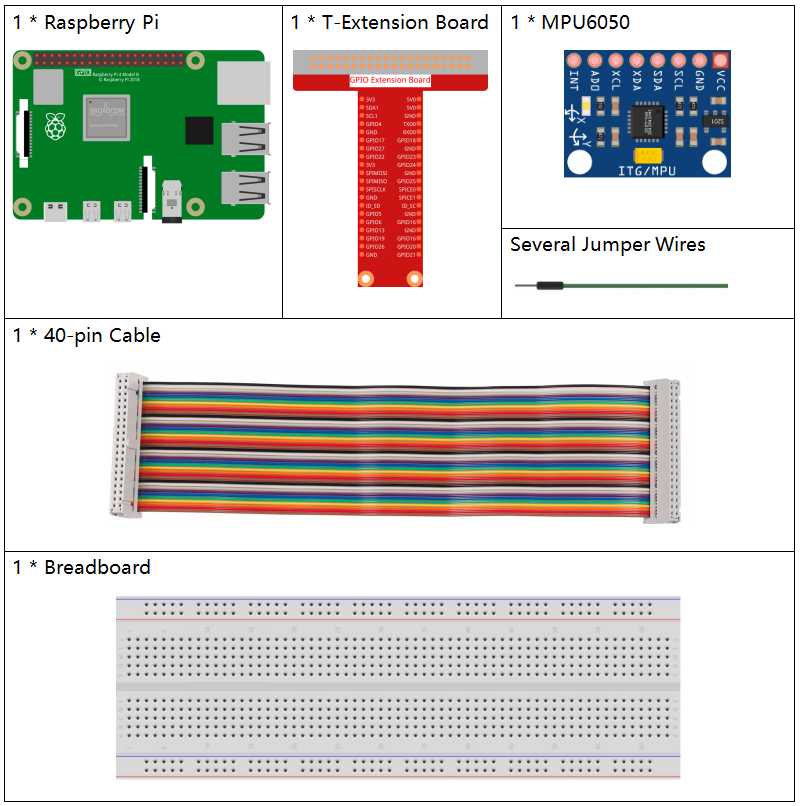
Componenti necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
Kit Raphael |
337 |
Puoi anche acquistarli separatamente dai link qui sotto.
INTRODUZIONE AI COMPONENTI |
LINK DI ACQUISTO |
|---|---|
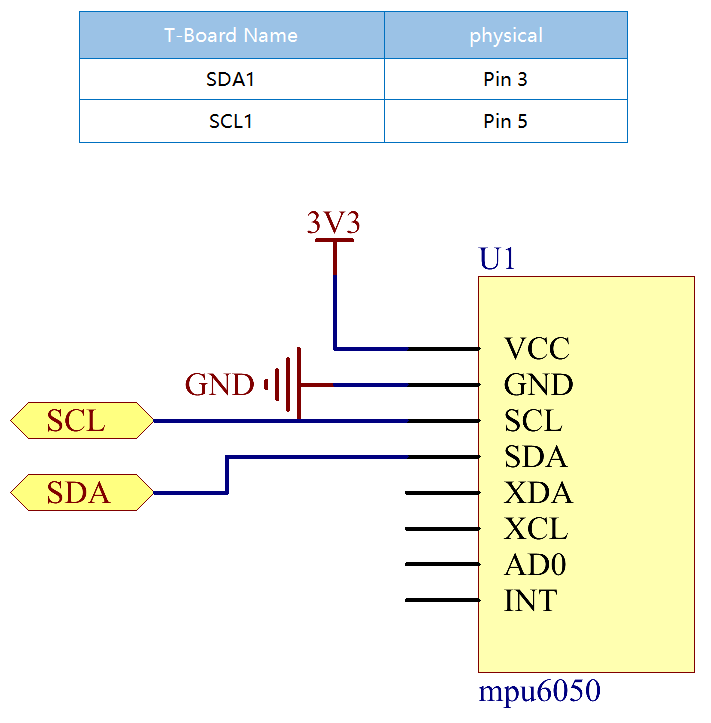
Schema elettrico
MPU6050 comunica con il microcontrollore tramite l’interfaccia bus I2C. SDA1 e SCL1 devono essere collegati al pin corrispondente.
Procedure sperimentali
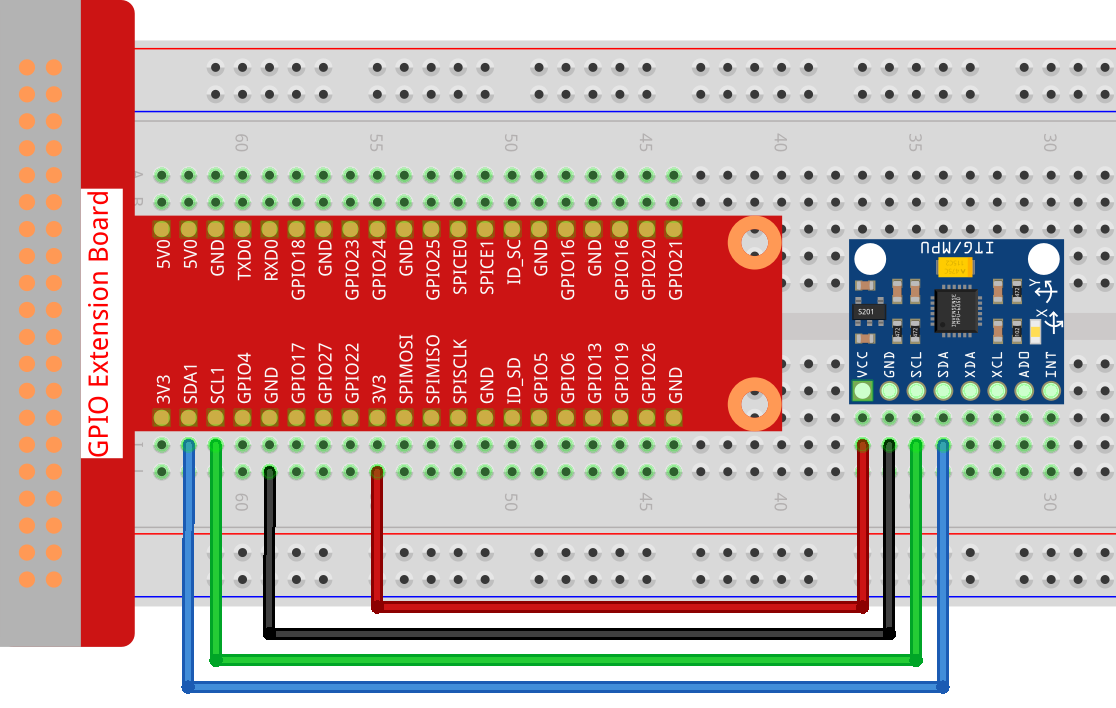
Passo 1: Costruisci il circuito.
Passo 2: Configura I2C (vedi Appendice Configurazione I²C. Se hai già configurato I2C, salta questo passaggio).
Passo 2: Vai alla cartella del codice.
cd ~/raphael-kit/nodejs/
Passo 3: Installa le dipendenze.
sudo npm install mpu6050-gyro
Passo 4: Esegui il codice.
sudo node mpu6050_module.js
Con l’esecuzione del codice, l’angolo di deviazione degli assi x e y e l’accelerazione e la velocità angolare su ciascun asse letti dal MPU6050 verranno stampati sullo schermo dopo essere stati calcolati.
Codice
var gyro = require("mpu6050-gyro");
var address = 0x68; // Indirizzo MPU6050
var bus = 1; // Bus I2C utilizzato
var gyro = new gyro( bus, address );
async function update_telemetry() {
var gyro_xyz = gyro.get_gyro_xyz();
var accel_xyz = gyro.get_accel_xyz();
var gyro_data = {
gyro_xyz: gyro_xyz,
accel_xyz: accel_xyz,
rollpitch: gyro.get_roll_pitch( gyro_xyz, accel_xyz )
}
console.log(gyro_data);
setTimeout(update_telemetry, 500);
}
if ( gyro ) {
update_telemetry();
}
Spiegazione del codice
var gyro = require("mpu6050-gyro");
var address = 0x68; // Indirizzo MPU6050
var bus = 1; // Bus I2C utilizzato
var gyro = new gyro( bus, address );
Importa il modulo mpu6050-gyro, determina l’indirizzo del MPU6050 e il bus e
crea l’oggetto gyro, rendendo conveniente chiamare le funzioni incapsulate nel modulo.
Nota
Per maggiori informazioni su questo modulo, consulta: https://www.npmjs.com/package/mpu6050-gyro
var gyro_xyz = gyro.get_gyro_xyz();
var accel_xyz = gyro.get_accel_xyz();
var gyro_data = {
gyro_xyz: gyro_xyz,
accel_xyz: accel_xyz,
rollpitch: gyro.get_roll_pitch( gyro_xyz, accel_xyz )
}
console.log(gyro_data);
setTimeout(update_telemetry, 500);
Il modulo incapsula tre funzioni disponibili:
gyro.get_gyro_xyz(): Restituisce un oggetto JSON con i dati grezzi x, y, z dal giroscopio.
gyro.get_accel_xyz(): Restituisce un oggetto JSON con i dati grezzi x, y, z dall’accelerometro.
gyro.get_roll_pitch( gyro_xyz, accel_xyz ): Restituisce un oggetto JSON con rollio e beccheggio in gradi.
Immagine del fenomeno