Nota
Ciao, benvenuto nella SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra comunità e del nostro team.
Impara e Condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato a nuovi annunci di prodotti e anteprime esclusive.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni durante le festività.
👉 Pronto per esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
2.2.8 Modulo Sensore Ultrasonico
Introduzione
Il sensore ultrasonico utilizza gli ultrasuoni per rilevare con precisione gli oggetti e misurare le distanze. Emette onde ultrasoniche e le converte in segnali elettronici.
Componenti necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
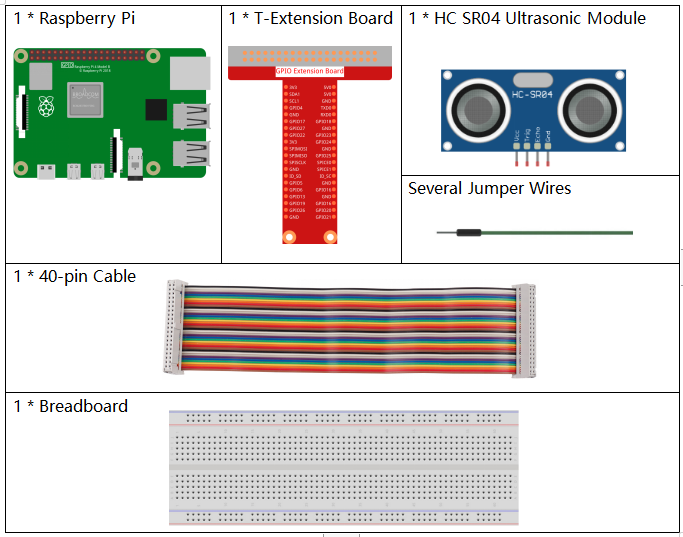
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
Kit Raphael |
337 |
Puoi anche acquistarli separatamente dai link qui sotto.
INTRODUZIONE AI COMPONENTI |
LINK DI ACQUISTO |
|---|---|
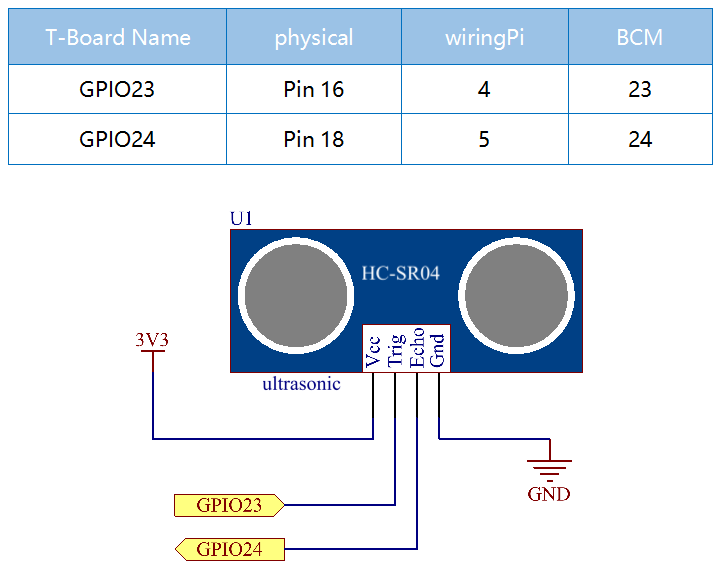
Schema elettrico
Procedure sperimentali
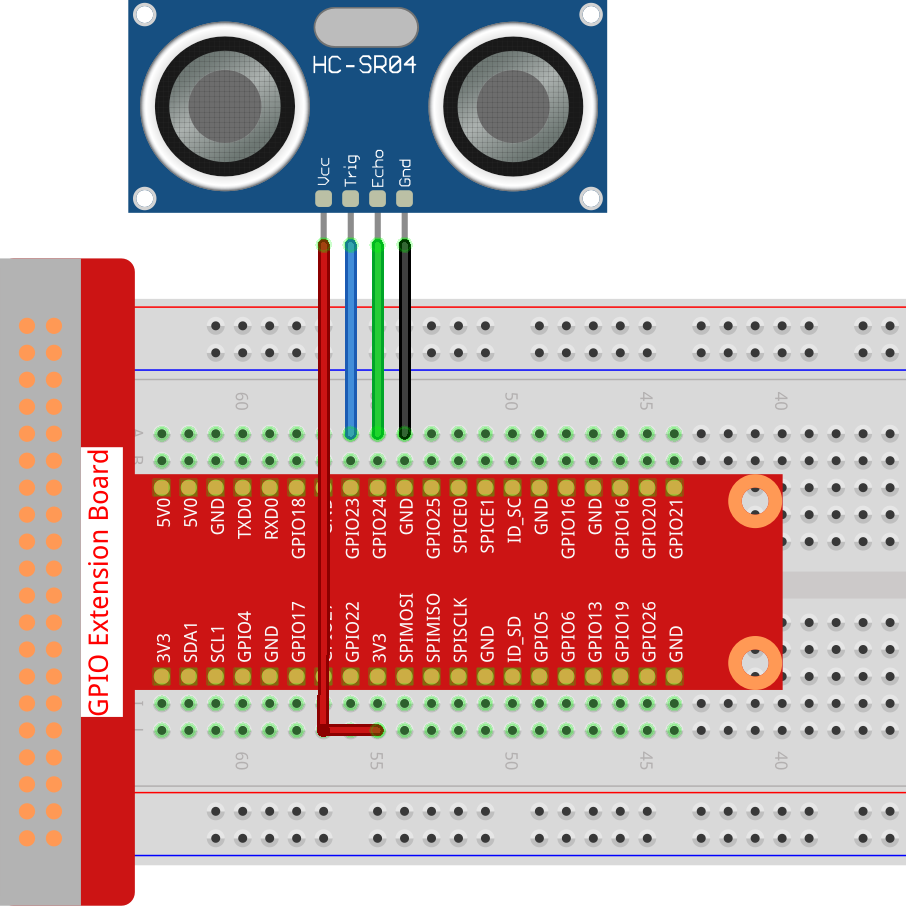
Passo 1: Costruisci il circuito.
Passo 2: Vai alla cartella del codice.
cd ~/raphael-kit/nodejs/
Passo 3: Esegui il codice.
sudo node ultrasonic_sensor.js
Con l’esecuzione del codice, il modulo sensore ultrasonico rileva la distanza tra l’ostacolo davanti e il modulo stesso, quindi il valore della distanza verrà stampato sullo schermo.
Codice
const Gpio = require('pigpio').Gpio;
// The number of microseconds it takes sound to travel 1cm at 20 degrees celcius
const MICROSECDONDS_PER_CM = 1e6/34321;
const trigger = new Gpio(23, {mode: Gpio.OUTPUT});
const echo = new Gpio(24, {mode: Gpio.INPUT, alert: true});
trigger.digitalWrite(0); // Make sure trigger is low
const watchHCSR04 = () => {
let startTick;
echo.on('alert', (level, tick) => {
if (level === 1) {
startTick = tick;
} else {
const endTick = tick;
const diff = (endTick >> 0) - (startTick >> 0); // Unsigned 32 bit arithmetic
console.log(diff / 2 / MICROSECDONDS_PER_CM);
}
});
};
watchHCSR04();
// Trigger a distance measurement once per second
setInterval(() => {
trigger.trigger(10, 1); // Set trigger high for 10 microseconds
}, 1000);
Spiegazione del codice
La funzione trigger può essere utilizzata per generare un impulso su un
GPIO e gli alert possono essere utilizzati per determinare il tempo di
cambio stato di un GPIO con precisione di pochi microsecondi.
Queste due caratteristiche possono essere combinate per misurare la distanza utilizzando un sensore ultrasonico HC-SR04.
setInterval(() => {
trigger.trigger(10, 1); // Set trigger high for 10 microseconds
}, 1000);
Questo invia periodicamente un impulso ultrasonico di 10 microsecondi.
const watchHCSR04 = () => {
echo.on('alert', (level, tick) => {
if (level === 1) {
startTick = tick;
} else {
const endTick = tick;
const diff = (endTick >> 0) - (startTick >> 0); // Aritmetica su 32 bit senza segno
console.log(diff / 2 / MICROSECDONDS_PER_CM);
}
});
};
Questa funzione imposta un allarme che registra il tempo tra l’invio dell’impulso (quando il livello è 1) e la ricezione dell’eco (quando il livello è 0). Moltiplicando la differenza di tempo per la velocità del suono (e dividendo per 2), si ottiene la distanza dall’ostacolo.
Immagine del fenomeno