Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
2.2.9 Module MPU6050
Introduction
Le MPU-6050 est le premier et le seul dispositif de suivi de mouvement à 6 axes au monde (gyroscope à 3 axes et accéléromètre à 3 axes) conçu pour les smartphones, les tablettes et les capteurs portables. Il répond aux exigences de faible puissance, de faible coût et de haute performance.
Dans cette expérience, nous utilisons l’I2C pour obtenir les valeurs du capteur d’accélération à trois axes et du gyroscope à trois axes du MPU6050 et les afficher à l’écran.
Composants nécessaires
Dans ce projet, nous avons besoin des composants suivants.
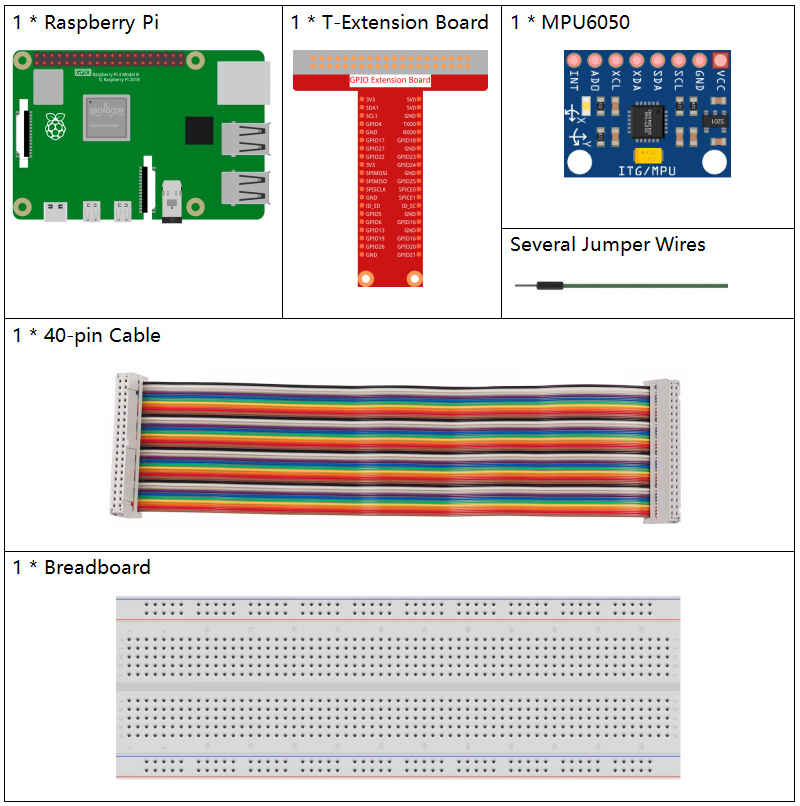
Il est certainement pratique d’acheter un kit complet, voici le lien :
Nom |
ARTICLES DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément via les liens ci-dessous.
INTRODUCTION DU COMPOSANT |
LIEN D’ACHAT |
|---|---|
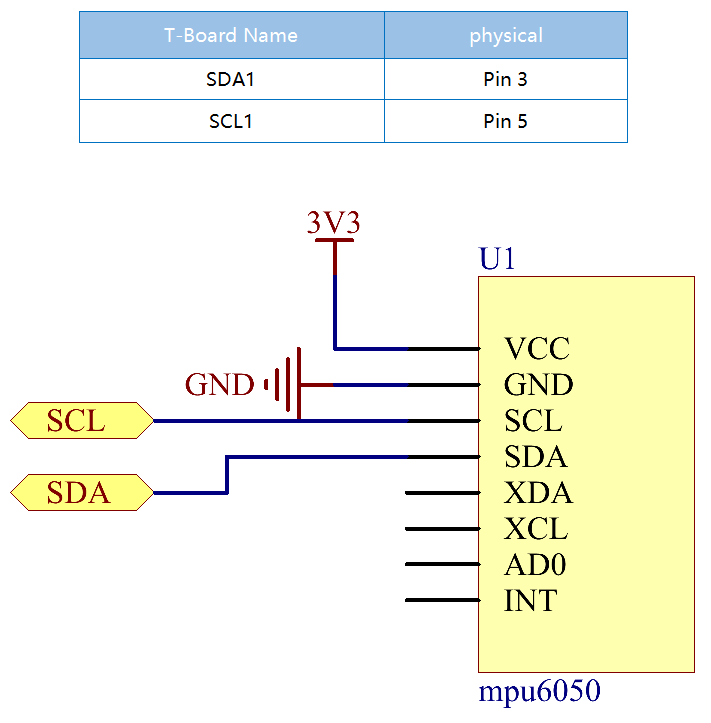
Schéma
Le MPU6050 communique avec le microcontrôleur via l’interface du bus I2C. Les broches SDA1 et SCL1 doivent être connectées aux broches correspondantes.
Procédures expérimentales
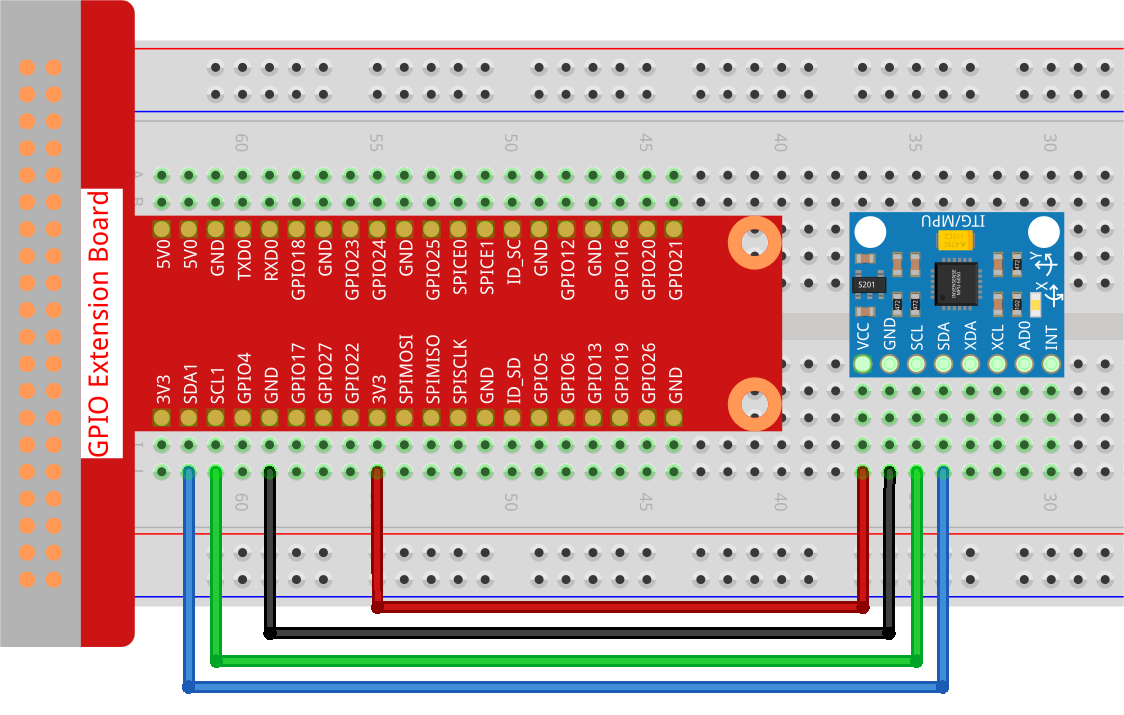
Étape 1 : Construisez le circuit.
Étape 2 : Configurez I2C (voir l’annexe Configuration I²C. Si vous avez déjà configuré I2C, passez cette étape.)
Étape 3 : Allez dans le dossier du code.
cd ~/raphael-kit/python-pi5
Étape 4 : Exécutez le fichier exécutable.
sudo python3 2.2.9_mpu6050_zero.py
Lorsque le code est exécuté, l’angle de déviation des axes x et y, ainsi que l’accélération et la vitesse angulaire de chaque axe lues par le MPU6050 seront affichés à l’écran après calcul.
Note
Si vous obtenez l’erreur
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1', vous devez vous référer à Configuration I²C pour activer l’I2C.Si vous obtenez l’erreur
ModuleNotFoundError: No module named 'smbus2', veuillez exécutersudo apt install python3-smbus2.Si l’erreur
OSError: [Errno 121] Remote I/O errorapparaît, cela signifie que le module est mal câblé ou que le module est cassé.
Avertissement
Si vous recevez le message d’erreur RuntimeError: Cannot determine SOC peripheral base address, veuillez consulter Si « gpiozero » ne fonctionne pas.
Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci-dessous. Mais avant cela, vous devez vous rendre au chemin du code source comme raphael-kit/python-pi5. Après avoir modifié le code, vous pouvez l’exécuter directement pour voir l’effet.
import smbus
import math
import time
# Power management registers
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
def read_byte(adr):
return bus.read_byte_data(address, adr)
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr+1)
val = (high << 8) + low
return val
def read_word_2c(adr):
val = read_word(adr)
if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
def dist(a,b):
return math.sqrt((a*a)+(b*b))
def get_y_rotation(x,y,z):
radians = math.atan2(x, dist(y,z))
return -math.degrees(radians)
def get_x_rotation(x,y,z):
radians = math.atan2(y, dist(x,z))
return math.degrees(radians)
bus = smbus.SMBus(1) # or bus = smbus.SMBus(1) for Revision 2 boards
address = 0x68 # This is the address value read via the i2cdetect command
# Now wake the 6050 up as it starts in sleep mode
bus.write_byte_data(address, power_mgmt_1, 0)
while True:
time.sleep(0.1)
gyro_xout = read_word_2c(0x43)
gyro_yout = read_word_2c(0x45)
gyro_zout = read_word_2c(0x47)
print ("gyro_xout : ", gyro_xout, " scaled: ", (gyro_xout / 131))
print ("gyro_yout : ", gyro_yout, " scaled: ", (gyro_yout / 131))
print ("gyro_zout : ", gyro_zout, " scaled: ", (gyro_zout / 131))
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
print ("accel_xout: ", accel_xout, " scaled: ", accel_xout_scaled)
print ("accel_yout: ", accel_yout, " scaled: ", accel_yout_scaled)
print ("accel_zout: ", accel_zout, " scaled: ", accel_zout_scaled)
print ("x rotation: " , get_x_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))
print ("y rotation: " , get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))
time.sleep(1)
Explication du code
Lire les données du capteur envoyées par le MPU6050.
def read_word(adr): high = bus.read_byte_data(address, adr) low = bus.read_byte_data(address, adr+1) val = (high << 8) + low return val def read_word_2c(adr): val = read_word(adr) if (val >= 0x8000): return -((65535 - val) + 1) else: return val
Calculer l’angle de déviation de l’axe y.
def get_y_rotation(x,y,z): radians = math.atan2(x, dist(y,z)) return -math.degrees(radians)
Calculer l’angle de déviation de l’axe x.
def get_x_rotation(x,y,z): radians = math.atan2(y, dist(x,z)) return math.degrees(radians)
Lire les valeurs des axes x, y et z sur le capteur gyroscopique, convertir les métadonnées en valeurs de vitesse angulaire, puis les imprimer.
gyro_xout = read_word_2c(0x43) gyro_yout = read_word_2c(0x45) gyro_zout = read_word_2c(0x47) print ("gyro_xout : ", gyro_xout, " scaled: ", (gyro_xout / 131)) print ("gyro_yout : ", gyro_yout, " scaled: ", (gyro_yout / 131)) print ("gyro_zout : ", gyro_zout, " scaled: ", (gyro_zout / 131))
Lire les valeurs des axes x, y et z sur le capteur d’accélération, convertir les éléments en valeurs de vitesse accélérée (unité de gravité), et les imprimer.
accel_xout = read_word_2c(0x3b) accel_yout = read_word_2c(0x3d) accel_zout = read_word_2c(0x3f) accel_xout_scaled = accel_xout / 16384.0 accel_yout_scaled = accel_yout / 16384.0 accel_zout_scaled = accel_zout / 16384.0 print ("accel_xout: ", accel_xout, " scaled: ", accel_xout_scaled) print ("accel_yout: ", accel_yout, " scaled: ", accel_yout_scaled) print ("accel_zout: ", accel_zout, " scaled: ", accel_zout_scaled)
Imprimer les angles de déviation des axes x et y.
print ("x rotation: " , get_x_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)) print ("y rotation: " , get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))