Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
Module MPU6050
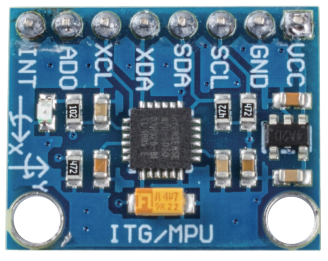
Le MPU-6050 est un dispositif de suivi de mouvement à 6 axes (combinant un gyroscope à 3 axes et un accéléromètre à 3 axes).
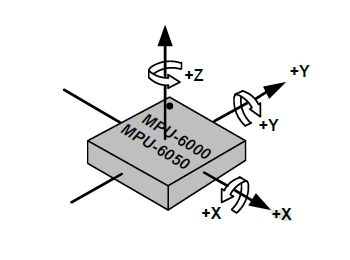
Ses trois systèmes de coordonnées sont définis comme suit :
Placez le MPU6050 à plat sur la table, assurez-vous que la face avec l’étiquette est vers le haut et qu’un point sur cette surface est dans le coin supérieur gauche. Ensuite, la direction verticale vers le haut est l’axe Z de la puce. La direction de gauche à droite est considérée comme l’axe X. Par conséquent, la direction de l’arrière vers l’avant est définie comme l’axe Y.
Accéléromètre 3 axes
L’accéléromètre fonctionne sur le principe de l’effet piézoélectrique, c’est-à-dire la capacité de certains matériaux à générer une charge électrique en réponse à une contrainte mécanique appliquée.
Ici, imaginez une boîte cuboïdale contenant une petite balle à l’intérieur, comme sur l’image ci-dessus. Les parois de cette boîte sont faites de cristaux piézoélectriques. Chaque fois que vous inclinez la boîte, la balle est forcée de se déplacer dans la direction de l’inclinaison en raison de la gravité. La paroi avec laquelle la balle entre en collision crée de minuscules courants piézoélectriques. Il y a au total trois paires de parois opposées dans un cuboïde. Chaque paire correspond à un axe dans l’espace 3D : les axes X, Y et Z. En fonction du courant produit par les parois piézoélectriques, nous pouvons déterminer la direction de l’inclinaison et son amplitude.
Ici, imaginez une boîte cuboïdale, contenant une petite balle à l’intérieur, comme sur l’image ci-dessus. Les parois de cette boîte sont faites de cristaux piézoélectriques. Chaque fois que vous inclinez la boîte, la balle est forcée de se déplacer dans la direction de l’inclinaison, en raison de la gravité. La paroi avec laquelle la balle entre en collision crée de minuscules courants piézoélectriques. Il y a en tout trois paires de parois opposées dans un cuboïde. Chaque paire correspond à un axe dans l’espace 3D : les axes X, Y et Z. En fonction du courant produit par les parois piézoélectriques, nous pouvons déterminer la direction de l’inclinaison et son amplitude.
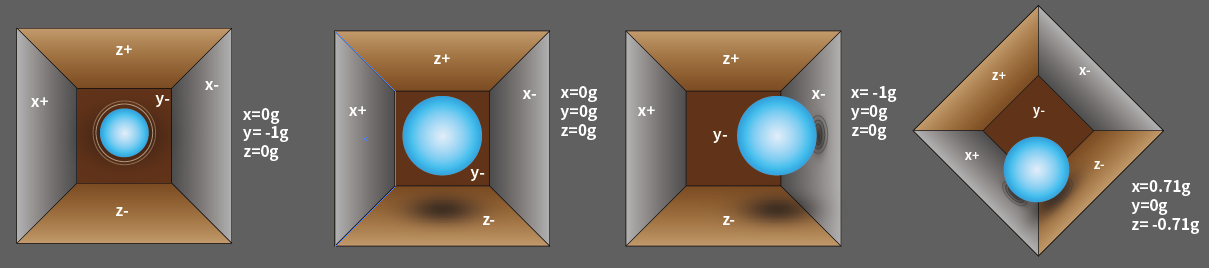
Nous pouvons utiliser le MPU6050 pour détecter son accélération sur chaque axe de coordonnées (dans l’état de bureau stationnaire, l’accélération de l’axe Z est de 1 unité de gravité, et les axes X et Y sont à 0). S’il est incliné ou en condition d’apesanteur/surchargée, la lecture correspondante changera.
Il existe quatre types de plages de mesure qui peuvent être sélectionnées par programmation : +/-2g, +/-4g, +/-8g et +/-16g (2g par défaut) correspondant à chaque précision. Les valeurs varient de -32768 à 32767.
La lecture de l’accéléromètre est convertie en valeur d’accélération en mappant la lecture de la plage de lecture à la plage de mesure.
Accélération = (Données brutes de l’axe de l’accéléromètre / 65536 * plage d’accélération à pleine échelle) g
Prenons l’axe X comme exemple, lorsque les données brutes de l’axe X de l’accéléromètre sont de 16384 et que la plage est sélectionnée à +/-2g :
Accélération le long de l’axe X = (16384 / 65536 * 4) g =1g
Gyroscope 3 axes
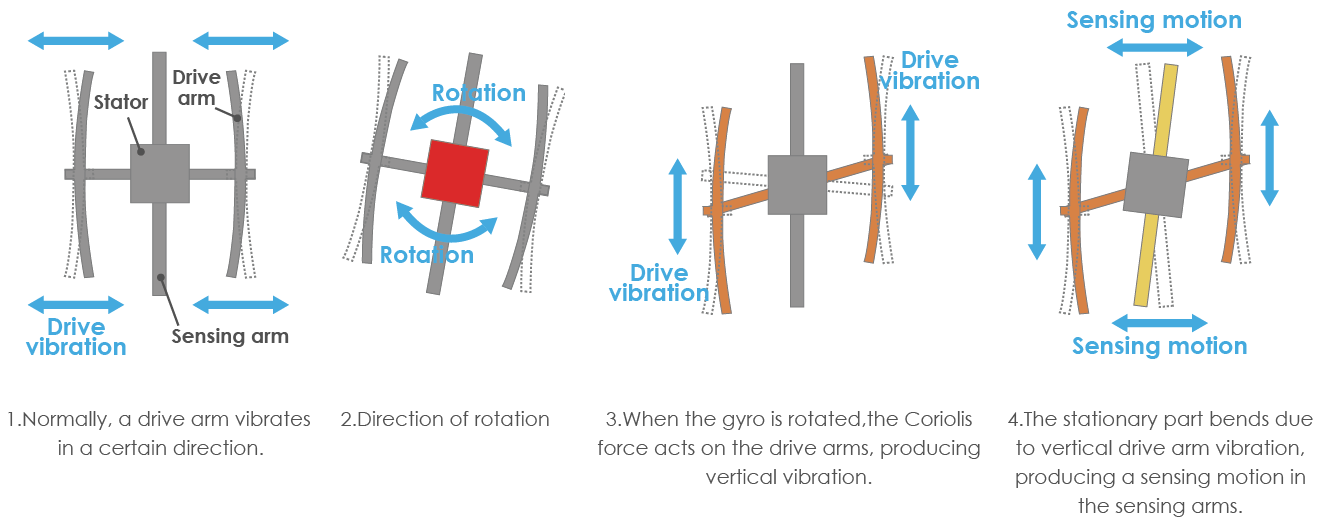
Les gyroscopes fonctionnent sur le principe de l’accélération de Coriolis. Imaginez qu’il y a une structure en forme de fourche, qui est en mouvement constant d’avant en arrière. Elle est maintenue en place à l’aide de cristaux piézoélectriques. Chaque fois que vous essayez d’incliner cet agencement, les cristaux subissent une force dans la direction de l’inclinaison. Cela est causé par l’inertie de la fourche en mouvement. Les cristaux produisent ainsi un courant en accord avec l’effet piézoélectrique, et ce courant est amplifié.
Le gyroscope dispose également de quatre types de plages de mesure : +/- 250, +/- 500, +/- 1000, +/- 2000. La méthode de calcul et l’accélération sont essentiellement cohérentes.
La formule pour convertir la lecture en vitesse angulaire est la suivante :
Vitesse angulaire = (Données brutes de l’axe du gyroscope / 65536 * plage du gyroscope à pleine échelle) °/s
Par exemple, pour l’axe X, les données brutes de l’axe X du gyroscope sont de 16384 et la plage est de +/- 250°/s :
Vitesse angulaire le long de l’axe X = (16384 / 65536 * 500)°/s =125°/s