Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
1.3.2 Servo
Introduction
Dans ce projet, nous allons apprendre à faire tourner un servo-moteur.
Composants Nécessaires
Pour ce projet, nous avons besoin des composants suivants.
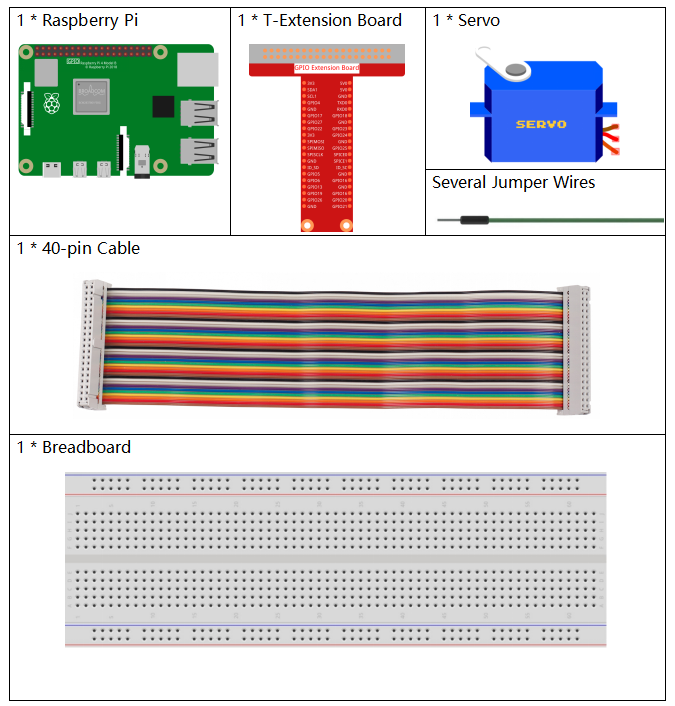
Il est certainement pratique d’acheter un kit complet, voici le lien :
Nom |
ARTICLES DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément à partir des liens ci-dessous.
INTRODUCTION AUX COMPOSANTS |
LIEN D’ACHAT |
|---|---|
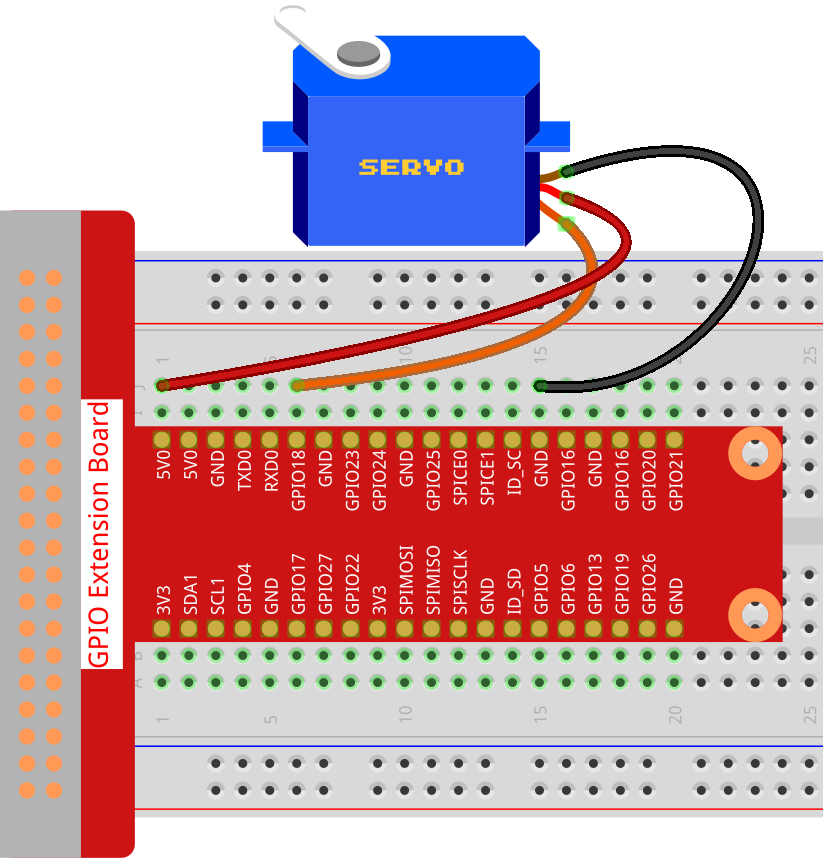
Schéma de Principe

Procédures Expérimentales
Étape 1 : Construisez le circuit.
Étape 2 : Accédez au dossier du code.
cd ~/raphael-kit/python/
Étape 3 : Exécutez le fichier exécutable.
sudo python3 1.3.2_Servo.py
Après l’exécution du programme, le servo-moteur tournera de 0 degrés à 180 degrés, puis de 180 degrés à 0 degrés, en boucle. Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci-dessous. Mais avant cela, vous devez vous rendre dans le chemin du code source comme raphael-kit/python. Après avoir modifié le code, vous pouvez l’exécuter directement pour voir l’effet.
import RPi.GPIO as GPIO
import time
SERVO_MIN_PULSE = 500
SERVO_MAX_PULSE = 2500
ServoPin = 18
def map(value, inMin, inMax, outMin, outMax):
return (outMax - outMin) * (value - inMin) / (inMax - inMin) + outMin
def setup():
global p
GPIO.setmode(GPIO.BCM) # Numbers GPIOs by BCM
GPIO.setup(ServoPin, GPIO.OUT) # Set ServoPin's mode is output
GPIO.output(ServoPin, GPIO.LOW) # Set ServoPin to low
p = GPIO.PWM(ServoPin, 50) # set Frequecy to 50Hz
p.start(0) # Duty Cycle = 0
def setAngle(angle): # make the servo rotate to specific angle (0-180 degrees)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)#map the angle to duty cycle and output it
def loop():
while True:
for i in range(0, 181, 5): #make servo rotate from 0 to 180 deg
setAngle(i) # Write to servo
time.sleep(0.002)
time.sleep(1)
for i in range(180, -1, -5): #make servo rotate from 180 to 0 deg
setAngle(i)
time.sleep(0.001)
time.sleep(1)
def destroy():
p.stop()
GPIO.cleanup()
if __name__ == '__main__': #Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the program destroy() will be executed.
destroy()
Explication du Code
p = GPIO.PWM(ServoPin, 50) # set Frequecy to 50Hz
p.start(0) # Duty Cycle = 0
Définir la broche ServoPin comme broche PWM, puis la fréquence à 50Hz, et la période à 20ms.
p.start(0) : Exécutez la fonction PWM et définissez la valeur initiale à 0.
def setAngle(angle): # make the servo rotate to specific angle (0-180 degrees)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)#map the angle to duty cycle and output it
Créer une fonction, setAngle() pour écrire un angle compris entre 0 et 180 dans le servo.
angle = max(0, min(180, angle))
Ce code est utilisé pour limiter l’angle dans la plage 0-180°.
La fonction min() renvoie la valeur minimale des valeurs d’entrée. Si 180<angle, alors retourner 180, sinon retourner angle.
La méthode max() renvoie l’élément maximal d’un itérable ou le plus grand de deux ou plusieurs paramètres. Si 0>angle, alors retourner 0, sinon retourner angle.
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)
Pour rendre une plage de 0 à 180° au servo, la largeur d’impulsion du servo est définie à 0,5ms(500us)-2,5ms(2500us).
La période du PWM est de 20ms(20000us), donc le cycle de service du PWM est (500/20000)%-(2500/20000)%, et la plage 0-180 est mappée à 2,5-12,5.
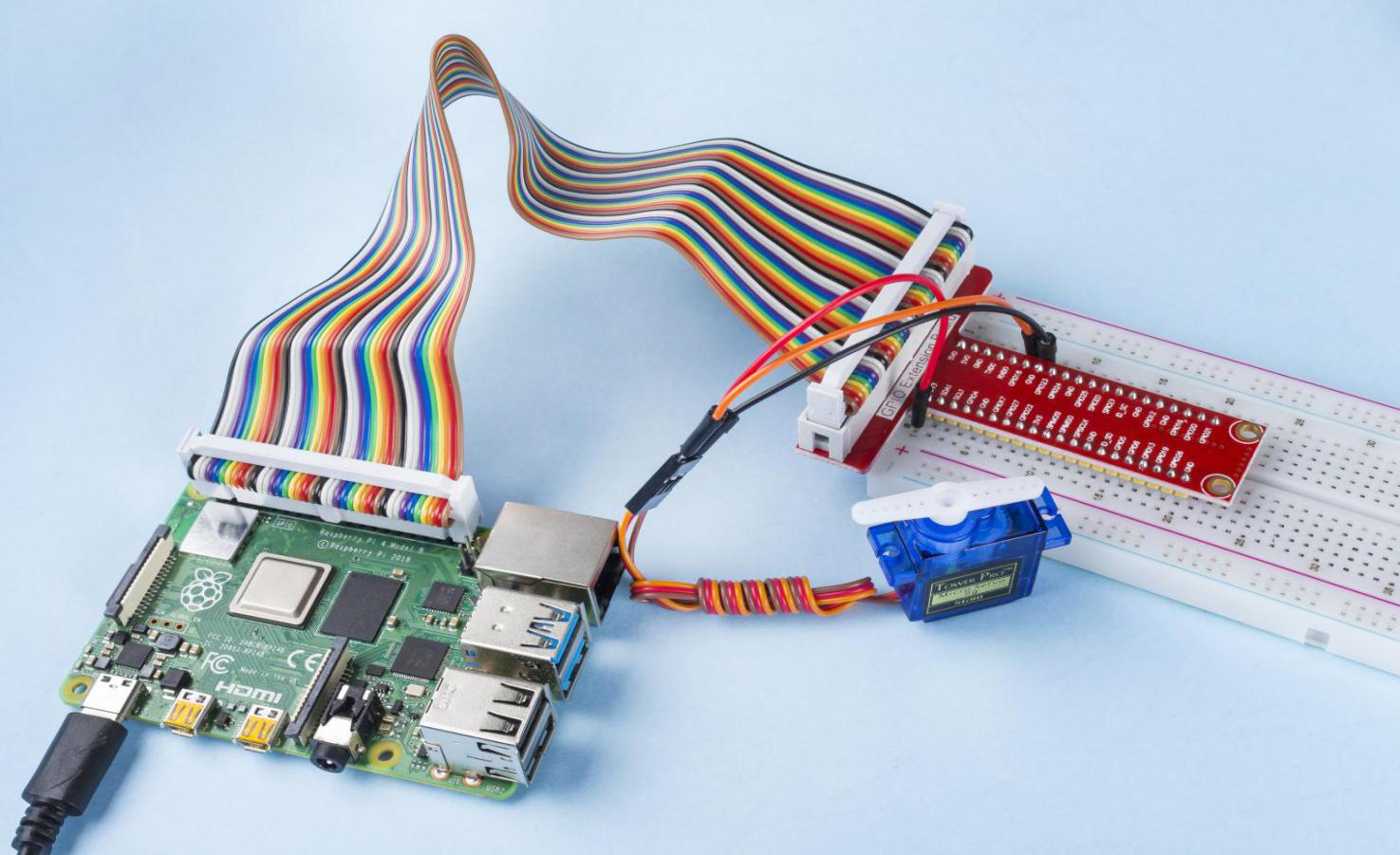
Image du Phénomène