Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
2.2.9 Module MPU6050
Introduction
Le MPU-6050 est le premier et unique dispositif de suivi de mouvement à 6 axes au monde (gyroscope à 3 axes et accéléromètre à 3 axes) conçu pour les smartphones, tablettes et capteurs portables qui possèdent ces caractéristiques, y compris les exigences de faible consommation d’énergie, de faible coût et de haute performance.
Dans cette expérience, nous utilisons l’I2C pour obtenir les valeurs du capteur d’accélération à trois axes et du gyroscope à trois axes du MPU6050 et les afficher à l’écran.
Composants nécessaires
Dans ce projet, nous avons besoin des composants suivants.
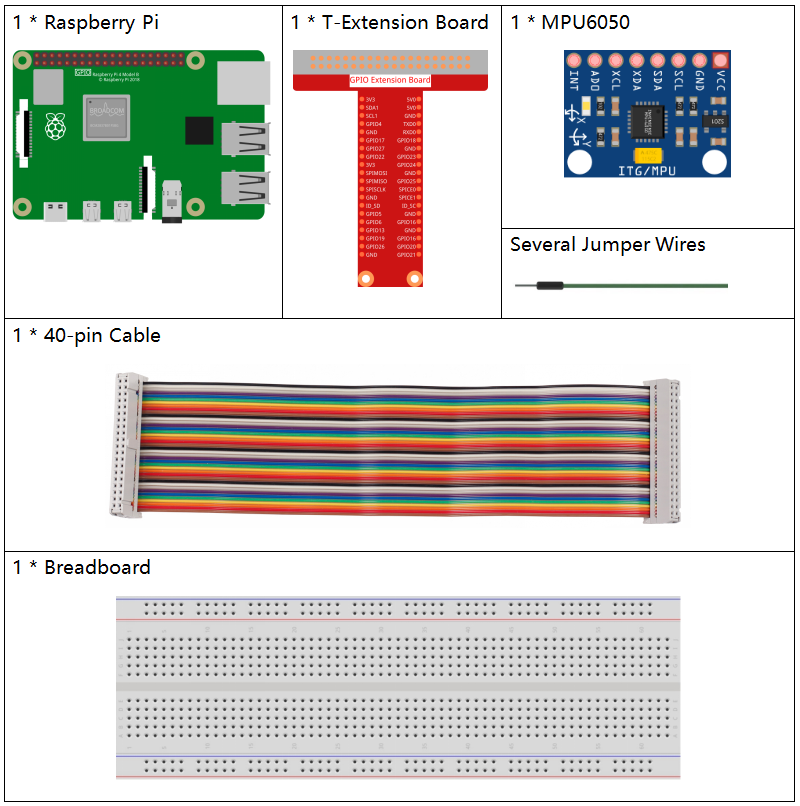
Il est certainement pratique d’acheter un kit complet, voici le lien :
Nom |
ARTICLES DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément à partir des liens ci-dessous.
INTRODUCTION DES COMPOSANTS |
LIEN D’ACHAT |
|---|---|
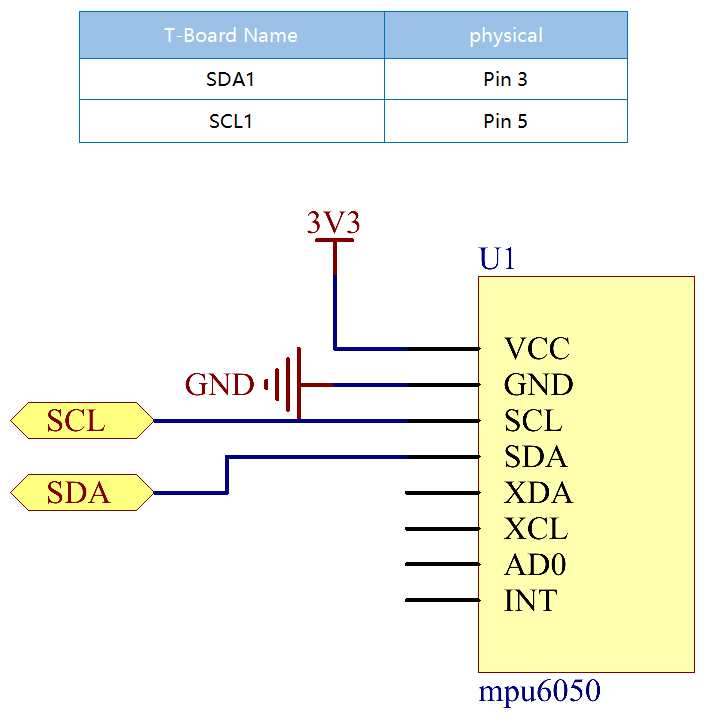
Schéma de câblage
Le MPU6050 communique avec le microcontrôleur via l’interface de bus I2C. Le SDA1 et le SCL1 doivent être connectés à la broche correspondante.
Procédures expérimentales
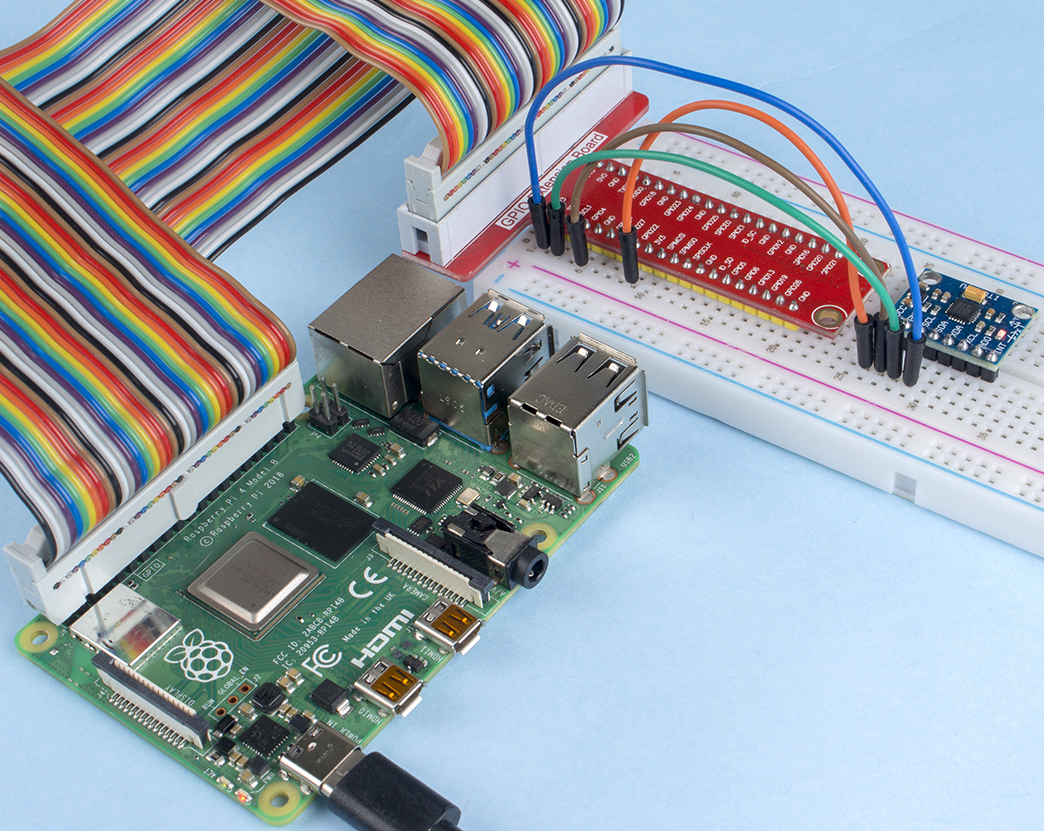
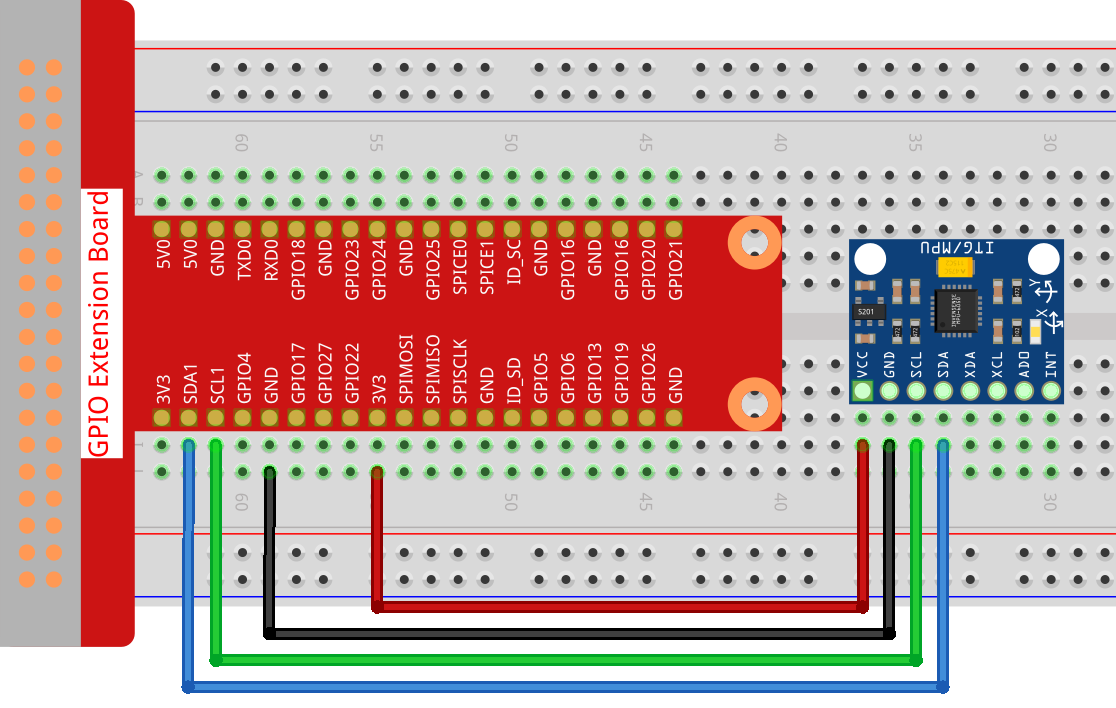
Étape 1 : Construire le circuit.
Étape 2 : Configurer l’I2C (voir l’annexe Configuration I²C. Si vous avez déjà configuré l’I2C, passez cette étape.)
Étape 3 : Aller dans le dossier du code.
cd ~/raphael-kit/c/2.2.9/
Étape 4 : Compiler le code.
gcc 2.2.9_mpu6050.c -lwiringPi -lm
Étape 5 : Exécuter le fichier exécutable.
sudo ./a.out
Après l’exécution du code, l’angle de déviation des axes x et y, ainsi que l’accélération et la vitesse angulaire sur chaque axe lus par le MPU6050 seront affichés à l’écran après calcul.
Note
Si vous obtenez une erreur avec le message
wiringPi.h: No such file or directory, veuillez vous référer à Installer et vérifier WiringPi.Si vous obtenez l’erreur
Unable to open I2C device: No such file or directory, vous devez consulter Configuration I²C pour activer l’I2C et vérifier si le câblage est correct.
Code
#include <wiringPiI2C.h>
#include <wiringPi.h>
#include <stdio.h>
#include <math.h>
int fd;
int acclX, acclY, acclZ;
int gyroX, gyroY, gyroZ;
double acclX_scaled, acclY_scaled, acclZ_scaled;
double gyroX_scaled, gyroY_scaled, gyroZ_scaled;
int read_word_2c(int addr)
{
int val;
val = wiringPiI2CReadReg8(fd, addr);
val = val << 8;
val += wiringPiI2CReadReg8(fd, addr+1);
if (val >= 0x8000)
val = -(65536 - val);
return val;
}
double dist(double a, double b)
{
return sqrt((a*a) + (b*b));
}
double get_y_rotation(double x, double y, double z)
{
double radians;
radians = atan2(x, dist(y, z));
return -(radians * (180.0 / M_PI));
}
double get_x_rotation(double x, double y, double z)
{
double radians;
radians = atan2(y, dist(x, z));
return (radians * (180.0 / M_PI));
}
int main()
{
fd = wiringPiI2CSetup (0x68);
wiringPiI2CWriteReg8 (fd,0x6B,0x00);//disable sleep mode
printf("set 0x6B=%X\n",wiringPiI2CReadReg8 (fd,0x6B));
while(1) {
gyroX = read_word_2c(0x43);
gyroY = read_word_2c(0x45);
gyroZ = read_word_2c(0x47);
gyroX_scaled = gyroX / 131.0;
gyroY_scaled = gyroY / 131.0;
gyroZ_scaled = gyroZ / 131.0;
//Print values for the X, Y, and Z axes of the gyroscope sensor.
printf("My gyroX_scaled: %f\n", gyroY X_scaled);
printf("My gyroY_scaled: %f\n", gyroY Y_scaled);
printf("My gyroZ_scaled: %f\n", gyroY Z_scaled);
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
//Print the X, Y, and Z values of the acceleration sensor.
printf("My acclX_scaled: %f\n", acclX_scaled);
printf("My acclY_scaled: %f\n", acclY_scaled);
printf("My acclZ_scaled: %f\n", acclZ_scaled);
printf("My X rotation: %f\n", get_x_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
printf("My Y rotation: %f\n", get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
delay(100);
}
return 0;
}
Explication du code
int read_word_2c(int addr)
{
int val;
val = wiringPiI2CReadReg8(fd, addr);
val = val << 8;
val += wiringPiI2CReadReg8(fd, addr+1);
if (val >= 0x8000)
val = -(65536 - val);
return val;
}
Lecture des données du capteur envoyées par le MPU6050.
double get_y_rotation(double x, double y, double z)
{
double radians;
radians = atan2(x, dist(y, z));
return -(radians * (180.0 / M_PI));
}
Obtention de l’angle de déviation sur l’axe Y.
double get_x_rotation(double x, double y, double z)
{
double radians;
radians = atan2(y, dist(x, z));
return (radians * (180.0 / M_PI));
}
Calcul de l’angle de déviation de l’axe X.
gyroX = read_word_2c(0x43);
gyroY = read_word_2c(0x45);
gyroZ = read_word_2c(0x47);
gyroX_scaled = gyroX / 131.0;
gyroY_scaled = gyroY / 131.0;
gyroZ_scaled = gyroZ / 131.0;
//Print values for the X, Y, and Z axes of the gyroscope sensor.
printf("My gyroX_scaled: %f\n", gyroY X_scaled);
printf("My gyroY_scaled: %f\n", gyroY Y_scaled);
printf("My gyroZ_scaled: %f\n", gyroY Z_scaled);
Lecture des valeurs des axes x, y et z sur le capteur gyroscopique, conversion des métadonnées en valeurs de vitesse angulaire, puis impression de celles-ci.
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
//Print the X, Y, and Z values of the acceleration sensor.
printf("My acclX_scaled: %f\n", acclX_scaled);
printf("My acclY_scaled: %f\n", acclY_scaled);
printf("My acclZ_scaled: %f\n", acclZ_scaled);
Lecture des valeurs des axes x, y et z sur le capteur d’accélération, conversion des métadonnées en valeurs de vitesse accélérée (unité de gravité), puis impression de celles-ci.
printf("My X rotation: %f\n", get_x_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
printf("My Y rotation: %f\n", get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled));
Impression des angles de déviation des axes x et y.
Image du phénomène