Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
2.2.8 Module de Capteur Ultrasonique
Introduction
Le capteur ultrasonique utilise des ultrasons pour détecter avec précision des objets et mesurer des distances. Il émet des ondes ultrasonores et les convertit en signaux électroniques.
Composants Nécessaires
Dans ce projet, nous avons besoin des composants suivants.
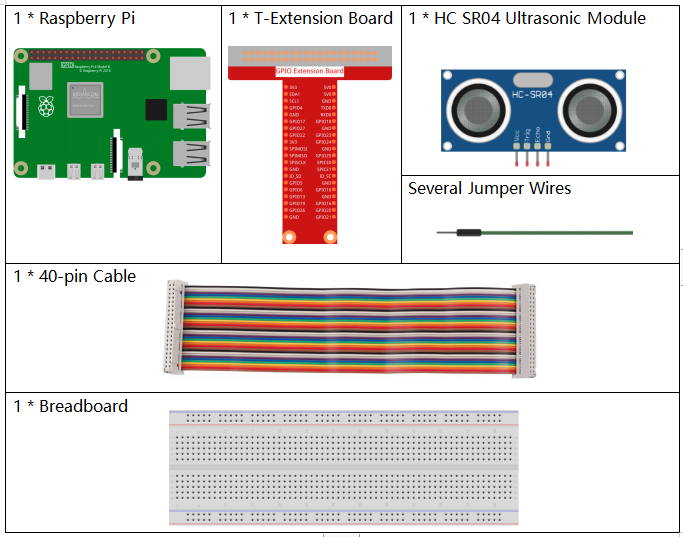
Il est définitivement pratique d’acheter un kit complet, voici le lien :
Nom |
ARTICLES DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément à partir des liens ci-dessous.
INTRODUCTION DES COMPOSANTS |
LIEN D’ACHAT |
|---|---|
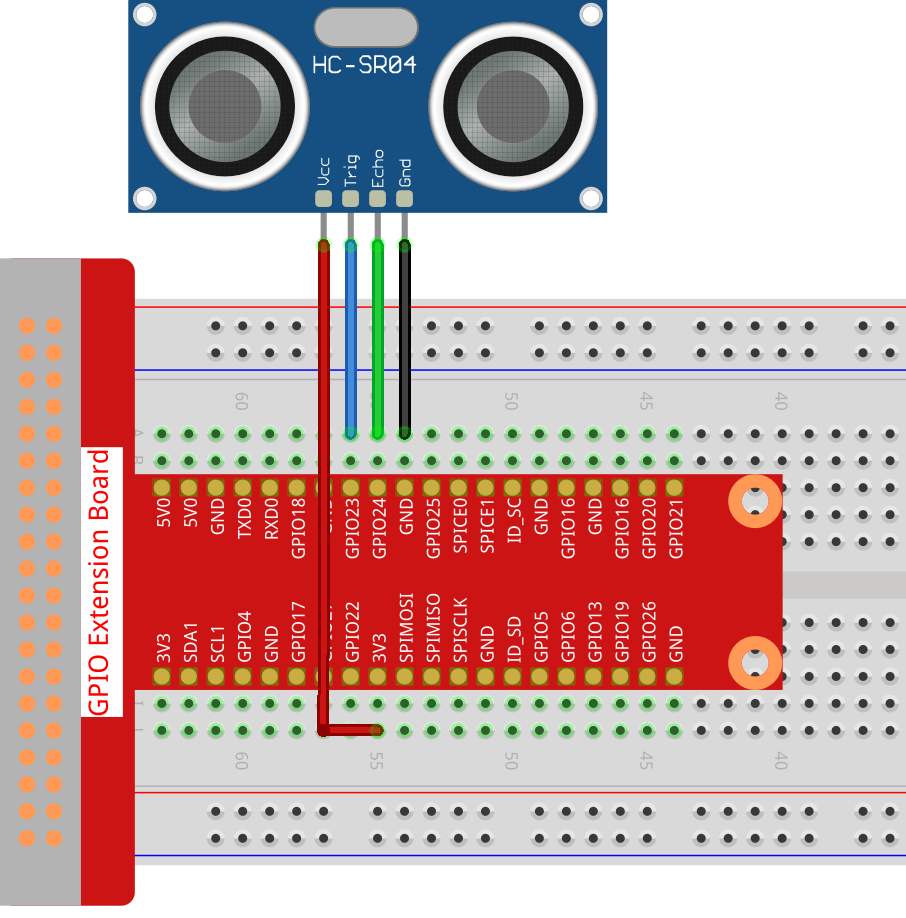
Schéma de Câblage

Procédures Expérimentales
Étape 1 : Construire le circuit.
Étape 2 : Aller dans le dossier du code.
cd ~/raphael-kit/c/2.2.8/
Étape 3 : Compiler le code.
gcc 2.2.8_Ultrasonic.c -lwiringPi
Étape 4 : Exécuter le fichier exécutable.
sudo ./a.out
Lorsque le code est exécuté, le module capteur ultrasonique détecte la distance entre l’obstacle devant lui et le module lui-même, puis la valeur de la distance sera affichée à l’écran. .. note:
Si cela ne fonctionne pas après l'exécution, ou s'il y a un message d'erreur : "wiringPi.h: No such file or directory", veuillez vous référer à :ref:`install_wiringpi_pi5`.
Code
#include <wiringPi.h>
#include <stdio.h>
#include <sys/time.h>
#define Trig 4
#define Echo 5
void ultraInit(void)
{
pinMode(Echo, INPUT);
pinMode(Trig, OUTPUT);
}
float disMeasure(void)
{
struct timeval tv1;
struct timeval tv2;
long time1, time2;
float dis;
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
while(!(digitalRead(Echo) == 1));
gettimeofday(&tv1, NULL);
while(!(digitalRead(Echo) == 0));
gettimeofday(&tv2, NULL);
time1 = tv1.tv_sec * 1000000 + tv1.tv_usec;
time2 = tv2.tv_sec * 1000000 + tv2.tv_usec;
dis = (float)(time2 - time1) / 1000000 * 34000 / 2;
return dis;
}
int main(void)
{
float dis;
if(wiringPiSetup() == -1){ //when initialize wiring failed,print message to screen
printf("setup wiringPi failed !");
return 1;
}
ultraInit();
while(1){
dis = disMeasure();
printf("%0.2f cm\n\n",dis);
delay(300);
}
return 0;
}
Explication du Code
void ultraInit(void)
{
pinMode(Echo, INPUT);
pinMode(Trig, OUTPUT);
}
Initialiser la broche ultrasonique; en même temps, régler Echo sur entrée, Trig sur sortie.
float disMeasure(void){};
Cette fonction est utilisée pour réaliser la fonction du capteur ultrasonique en calculant la distance de détection de retour.
struct timeval tv1;
struct timeval tv2;
La structure timeval est utilisée pour stocker l’heure actuelle. La structure complète est la suivante :
struct timeval
{
__time_t tv_sec; /* Seconds. */
__suseconds_t tv_usec; /* Microseconds. */
};
Ici, tv_sec représente les secondes écoulées depuis l’époque lors de la création de la structure timeval. Tv_usec représente les microsecondes ou une fraction de secondes.
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
Une impulsion ultrasonique de 10us est envoyée.
while(!(digitalRead(Echo) == 1));
gettimeofday(&tv1, NULL);
Cette boucle vide est utilisée pour s’assurer que lorsqu’un signal de déclenchement est envoyé, il n’y a pas de signal d’écho interférent, puis obtenir l’heure actuelle.
while(!(digitalRead(Echo) == 0));
gettimeofday(&tv2, NULL);
Cette boucle vide est utilisée pour s’assurer que l’étape suivante n’est pas exécutée tant que le signal d’écho n’est pas reçu, puis obtenir l’heure actuelle.
time1 = tv1.tv_sec * 1000000 + tv1.tv_usec;
time2 = tv2.tv_sec * 1000000 + tv2.tv_usec;
Convertir le temps stocké par la structure timeval en temps total en microsecondes.
dis = (float)(time2 - time1) / 1000000 * 34000 / 2;
La distance est calculée par l’intervalle de temps et la vitesse de propagation du son. La vitesse du son dans l’air : 34000 cm/s.
Image du Phénomène