Note
Bonjour et bienvenue dans la Communauté Facebook des passionnés de Raspberry Pi, Arduino et ESP32 de SunFounder ! Plongez plus profondément dans l’univers des Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et aux aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et cadeaux : Participez à des cadeaux et des promotions de vacances.
👉 Prêt à explorer et à créer avec nous ? Cliquez [Ici] et rejoignez-nous aujourd’hui !
1.3.1 Moteur
Introduction
Dans ce projet, nous allons apprendre à utiliser le L293D pour piloter un moteur à courant continu et le faire tourner dans le sens horaire et antihoraire. Étant donné que le moteur à courant continu nécessite un courant plus élevé, pour des raisons de sécurité, nous utilisons ici le module d’alimentation pour alimenter les moteurs.
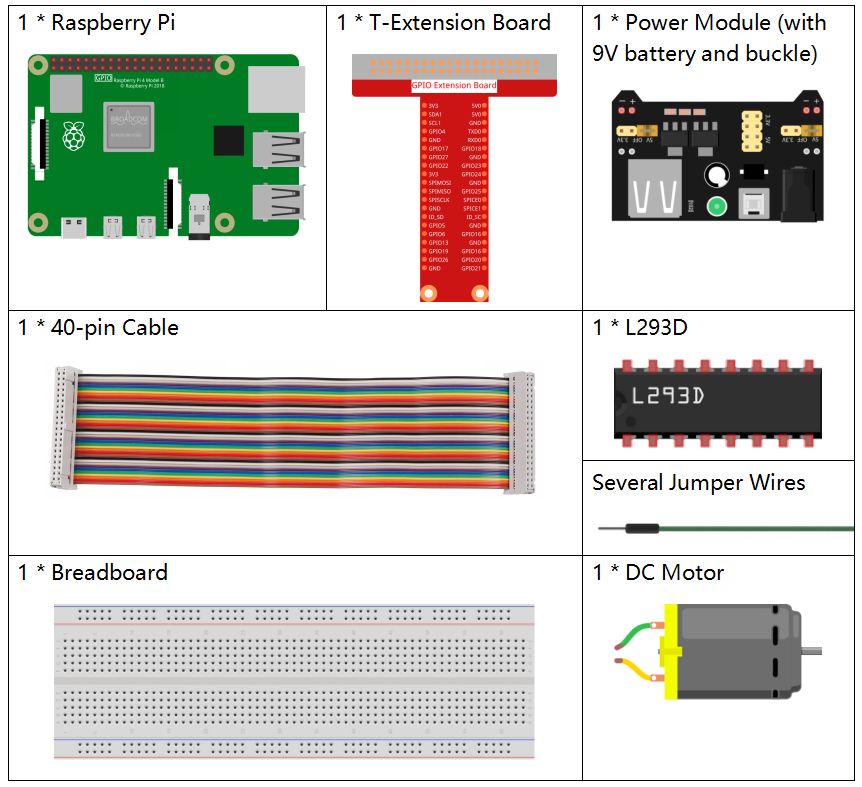
Composants nécessaires
Pour ce projet, nous avons besoin des composants suivants.
Il est très pratique d’acheter un kit complet, voici le lien :
Nom |
ARTICLES DANS CE KIT |
LIEN |
|---|---|---|
Kit Raphael |
337 |
Vous pouvez également les acheter séparément aux liens ci-dessous.
INTRODUCTION DES COMPOSANTS |
LIEN D’ACHAT |
|---|---|
- |
|
- |
|
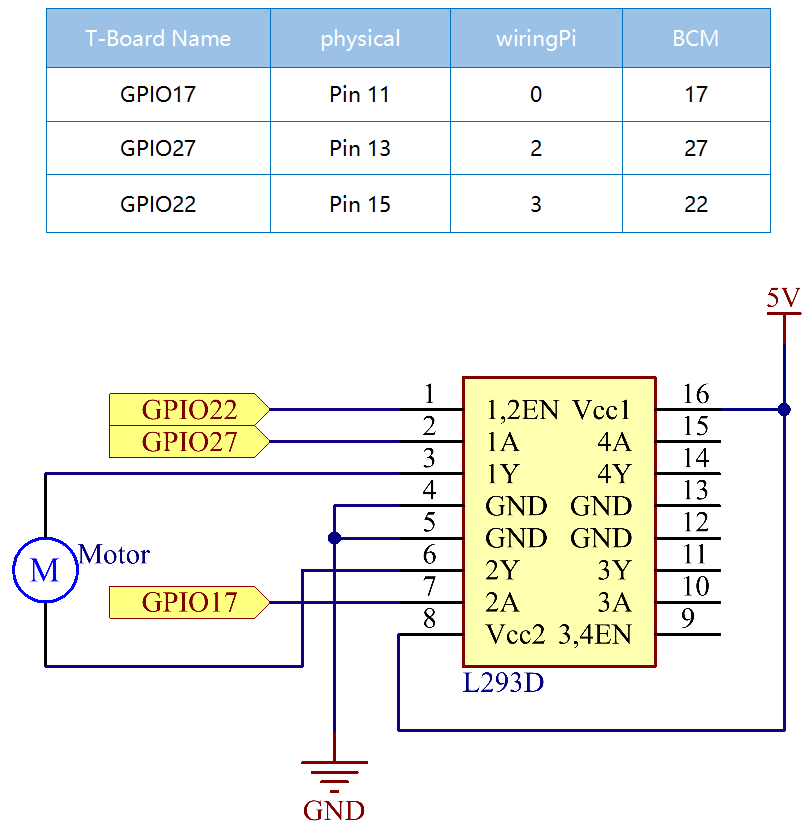
Schéma de câblage
Branchez le module d’alimentation dans la plaque d’essai et insérez le cavalier sur la broche 5V, il fournira alors une tension de 5V. Connectez la broche 1 du L293D au GPIO22 et réglez-la en niveau haut. Connectez la broche 2 au GPIO27 et la broche 7 au GPIO17, puis réglez une broche en niveau haut et l’autre en niveau bas. Ainsi, vous pouvez changer la direction de rotation du moteur.
Procédures expérimentales
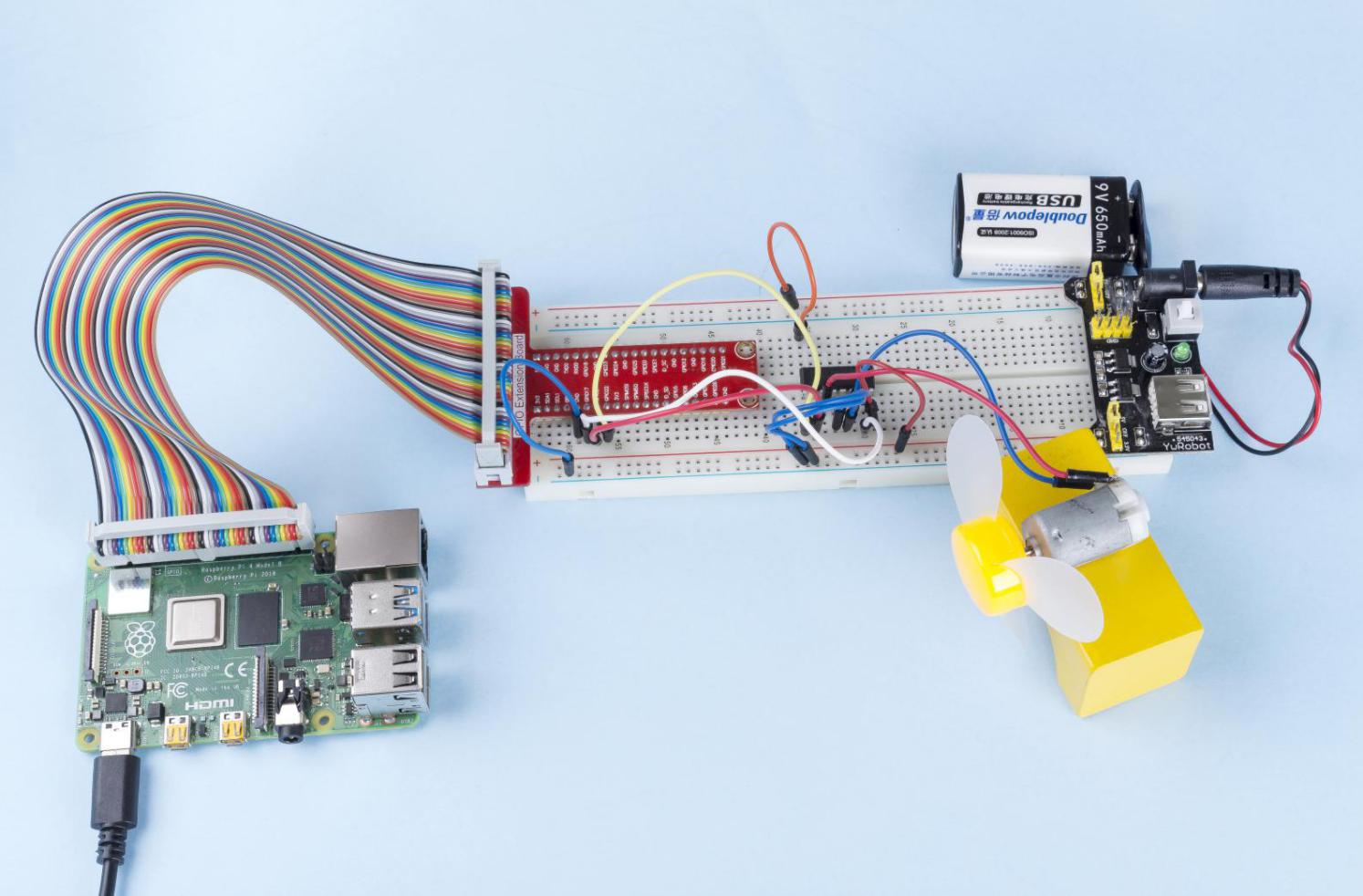
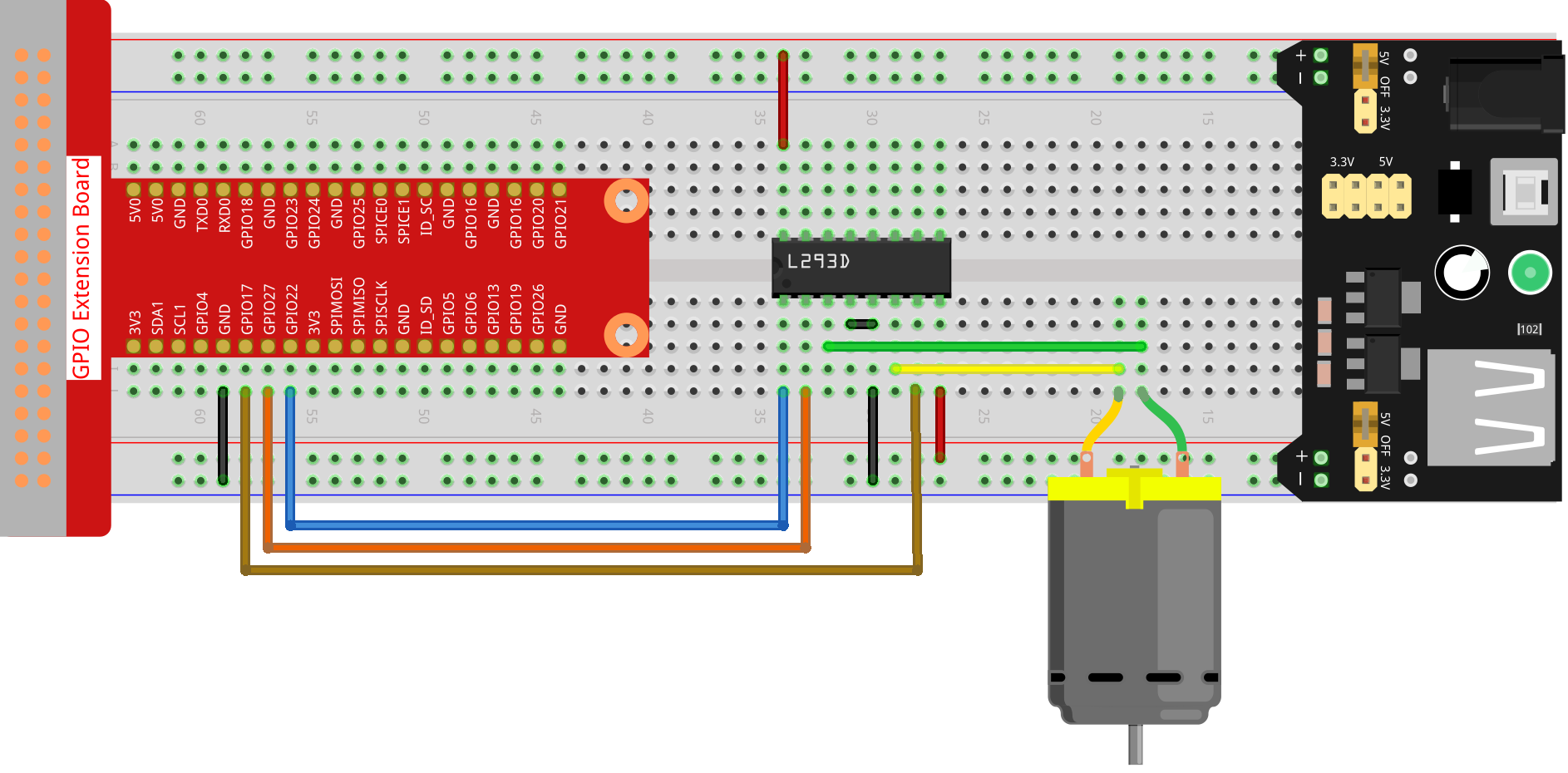
Étape 1 : Montez le circuit.
Note
Le module d’alimentation peut utiliser une batterie de 9V avec l’attache de batterie de 9V du kit. Insérez le cavalier du module d’alimentation dans les bandes de bus 5V de la plaque d’essai.

Étape 2 : Accédez au dossier du code.
cd ~/raphael-kit/c/1.3.1/
Étape 3 : Compilez.
gcc 1.3.1_Motor.c -lwiringPi
Étape 4 : Exécutez le fichier exécutable ci-dessus.
sudo ./a.out
Lorsque le code s’exécute, le moteur tourne d’abord dans le sens horaire pendant 5s puis s’arrête pendant 5s, après cela, il tourne dans le sens antihoraire pendant 5s ; ensuite, le moteur s’arrête pendant 5s. Cette série d’actions sera exécutée de manière répétée.
Note
Si cela ne fonctionne pas après l’exécution, ou s’il y a une erreur indiquant : "wiringPi.h: No such file or directory", veuillez vous référer à Installer et vérifier WiringPi.
Code
#include <wiringPi.h>
#include <stdio.h>
#define MotorPin1 0
#define MotorPin2 2
#define MotorEnable 3
int main(void){
int i;
if(wiringPiSetup() == -1){ //when initialize wiring failed, print messageto screen
printf("setup wiringPi failed !");
return 1;
}
pinMode(MotorPin1, OUTPUT);
pinMode(MotorPin2, OUTPUT);
pinMode(MotorEnable, OUTPUT);
while(1){
printf("Clockwise\n");
digitalWrite(MotorEnable, HIGH);
digitalWrite(MotorPin1, HIGH);
digitalWrite(MotorPin2, LOW);
for(i=0;i<3;i++){
delay(1000);
}
printf("Stop\n");
digitalWrite(MotorEnable, LOW);
for(i=0;i<3;i++){
delay(1000);
}
printf("Anti-clockwise\n");
digitalWrite(MotorEnable, HIGH);
digitalWrite(MotorPin1, LOW);
digitalWrite(MotorPin2, HIGH);
for(i=0;i<3;i++){
delay(1000);
}
printf("Stop\n");
digitalWrite(MotorEnable, LOW);
for(i=0;i<3;i++){
delay(1000);
}
}
return 0;
}
Explication du code
digitalWrite(MotorEnable, HIGH);
Activer le L239D.
digitalWrite(MotorPin1, HIGH);
digitalWrite(MotorPin2, LOW);
Définir un niveau haut pour 2A (broche 7); puisque 1,2EN (broche 1) est en niveau haut, 2Y sortira un niveau haut.
Définir un niveau bas pour 1A, alors 1Y sortira un niveau bas, et le moteur tournera.
for(i=0;i<3;i++){
delay(1000);
}
Cette boucle permet de retarder de 3*1000ms.
digitalWrite(MotorEnable, LOW)
Si 1,2EN (broche 1) est en niveau bas, L293D ne fonctionne pas. Le moteur cesse de tourner.
digitalWrite(MotorPin1, LOW)
digitalWrite(MotorPin2, HIGH)
Inverser le sens du courant du moteur, puis le moteur tournera en sens inverse.
Image du phénomène